某型飞机自动驾驶信号仿真系统设计与实现
2014-04-03饶明波巩立艳杨杰红谢慧慈
饶明波,巩立艳,杨杰红,谢慧慈
(中航工业洪都,江西 南昌 330024)
0 引言
某型飞机进行飞控系统机上地面自动驾驶功能逻辑测试试验时,需要为飞控计算机提供动态的飞机攻角、高度、马赫数等大气机数据以及飞机姿态角、升降速度等惯导数据信息。然而飞机在地面静止状态,真实飞机上的大气数据计算机以及惯导系统无法提供试验所需的动态数据。因此,需要设计一套地面自动驾驶信号仿真系统。
为实现与机上飞控计算机的数据交联,自动驾驶信号仿真系统采用基于1553B(GJB289A)总线标准开发[1]。同时系统增加了实时网功能,用于接收飞机运动仿真数据。
1 系统概述
自动驾驶信号仿真系统用于模拟惯导、大气数据计算机发送到飞控计算机的GJB289A总线信号。该系统可以人工设置惯导和大气数据计算机的仿真数据,然后通过GJB289A总线发送到飞控计算机,实现开环仿真试验,用于飞控系统机上自动驾驶功能逻辑测试试验;该仿真系统同时具备通过VMIC实时网络实时接收飞机运动仿真系统发送的飞机姿态等数据[2],并通过GJB289A总线发送到飞控计算机,构成闭环仿真试验环境,用于飞控系统铁鸟仿真试验[3]。自动驾驶信号仿真系统开/闭环试验连接示意如图1所示。
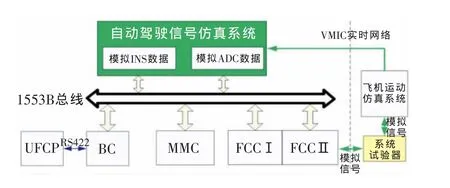
图1 自动驾驶信号仿真系统开/闭环连接示意图
2 仿真系统设计
2.1 系统功能设计
自动驾驶信号仿真系统应实现以下主要功能:
1)模拟惯导、大气数据计算机两个终端RT,并通过GJB 289A总线与飞控计算机进行通讯;
2)按照惯导与飞控计算机的GJB 289A总线接口协议模拟惯导发出的信息;
3)按照大气数据计算机与飞控计算机的GJB 289A总线接口协议模拟大气数据计算机发出的信息;
4)通过VMIC实时网络接收飞机运动仿真系统发出的飞机姿态、高度、速度等数据,并通过GJB 289A总线发送到飞控计算机、UFCP,供飞控系统闭环仿真使用;
5)在进行开环仿真试验时,能够动态设置惯导和大气数据计算机发出的信息并进行数据有效性的设置等。
自动驾驶信号仿真系统按照惯导、大气数据计算机与飞控计算机的GJB289A通信接口协议进行设计,接口协议如下。
1)惯导、大气数据计算机与飞控计算机Ⅰ、Ⅱ的RT地址如下所示:
(1)飞控计算机Ⅰ、Ⅱ的RT地址:12、13;
(2)惯导(INS)的RT地址:4;
(3)大气数据计算机(ADC)的RT地址:10。
2)惯导、大气数据计算机与飞控计算机GJB289A总线通信关系如下所示:
(1)INS:RT=4,SUB=4,TO FC1,RT=12,SUB=1
(2)INS:RT=4,SUB=5,TO FC2,RT=13,SUB=1
(3)ADC:RT=10,SUB=4,TO FC1,RT=12,SUB=2
(4)ADC:RT=10,SUB=5,TO FC2,RT=13,SUB=2
注:其中(4)表示:RT地址为10,子地址5,向RT地址为13,子地址2发送数据。
2.2 系统硬件设计
为实现仿真1553B总线数据以及接收实时网传输的数据信号,自动驾驶信号仿真系统的硬件组成包括:工控机、1553B数据通信板卡、实时网卡、总线传输线及接插件,所需的硬件设备如表1所示。

表1 自动驾驶信号仿真系统硬件组成
2.3 系统软件设计
自动驾驶信号仿真软件的开发环境为:
操作系统:Windows XP
软件环境:Visual C++6.0
自动驾驶信号仿真软件功能包括实现1553B板卡的初始化、实时网板卡的初始化、仿真界面设计、仿真信号有效性设置、仿真信号输入、实时网数据接收及信号转换处理、1553B仿真信号发送等功能。软件设计流程如图2所示。
根据自动驾驶信号模拟系统功能要求,自动驾驶信号仿真软件分为三大模块,即主界面、接口模块、数据仿真模块。
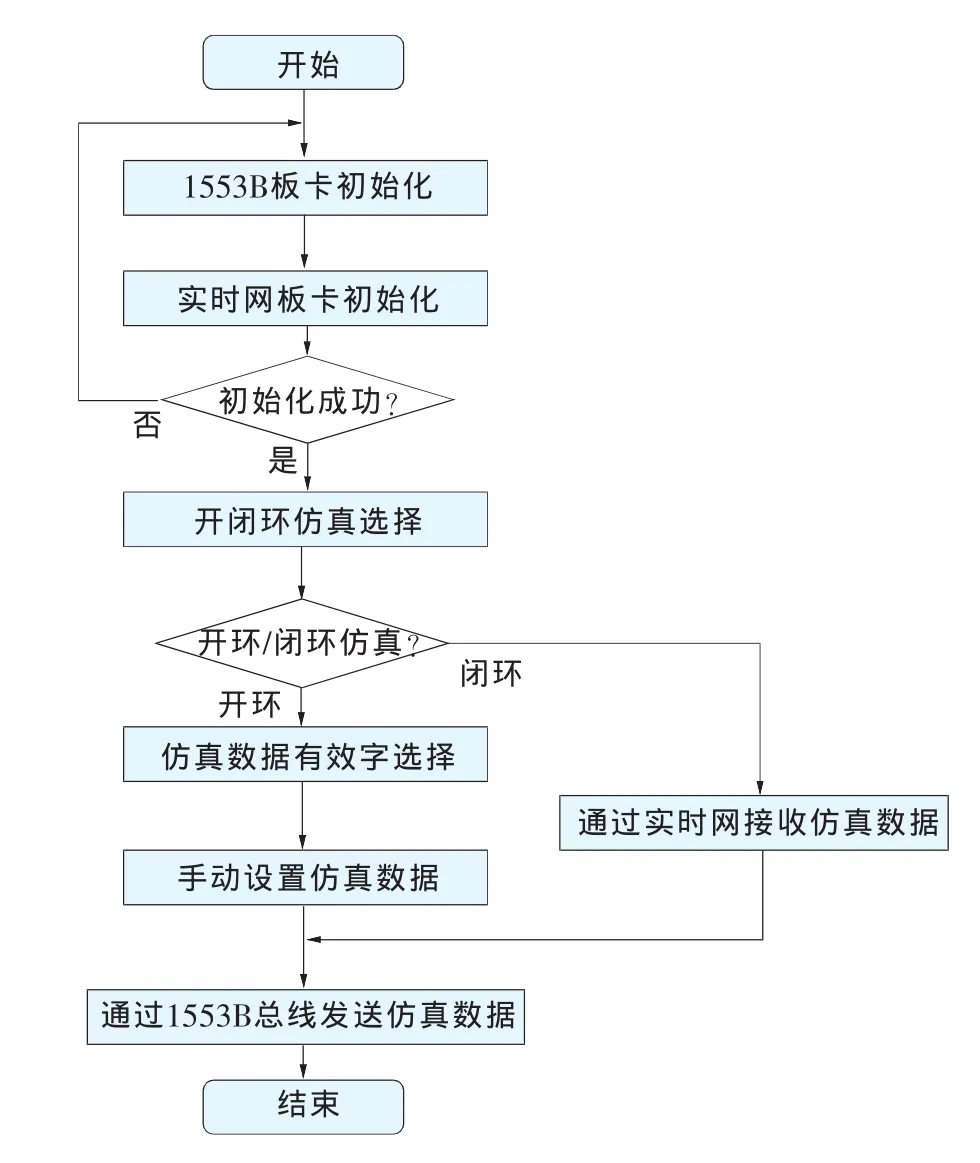
图2 仿真软件功能流程
1)接口模块
板卡初始化:实现GJB289A板卡、VMIC实时网卡的初始化;
数据准备:设置或通过实时网获取仿真数据并按接口文件规定转化为GJB 289A总线数据格式;
数据通信:按照GJB 289A总线数据协议通讯;按照实时网通信协议通讯。
通信周期:按规定的通信周期50ms进行数据收发。
2)系统主界面
自动驾驶信号仿真软件主界面是用户进行仿真操作的人工交互界面,主要内容包括:
板卡初始信息检查;
开/闭环仿真控制;
惯导/大气机数据有效性的设置;
惯导/大气机开环仿真数据输入;
仿真启动、暂停/停止和退出系统功能。
3)数据仿真模块
惯导数据仿真:模拟惯导向飞控计算机发送数据;
大气数据计算机数据仿真:模拟大气数据计算机向飞控计算机发送数据。
自动驾驶信号仿真软件作为模拟大气数据计算机和惯导两个RT,主要是在响应BC命令的基础,用来接收BC命令和数据以及上报状态。RT仿真软件算法根据GJB 289—1987《飞机内部时分制指令/响应式多路传输数据总线》中的消息格式要求进行[4],RT软件开发的流程如图3所示。

图3 RT软件开发流程
3 仿真系统实现
进行自动驾驶功能逻辑试验时,自动驾驶信号仿真系统与其他系统进行试验的组成环境及连接示意如图4所示。其中,进行机上或开环试验的接线方式不包括虚线框部分;进行铁鸟环境下的闭环试验接线方式包括虚线框里的内容。
自动驾驶信号仿真软件包括开环仿真和闭环仿真两部分功能,自动驾驶信号仿真软件运行的界面如图5所示。
4 结论
本文结合机上自动驾驶功能试验的需求,介绍了基于1553B总线及实时网技术的自动驾驶信号仿真系统的软硬件设计方法。该仿真系统经机上及铁鸟环境的自动驾驶功能逻辑试验验证,系统功能稳定,满足试验要求。
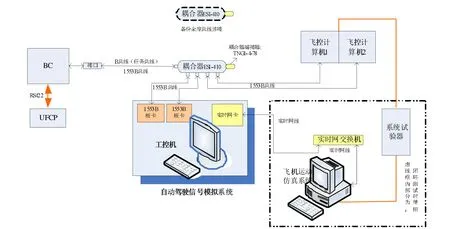
图4 自动驾驶功能试验仿真环境组成图

图5 自动驾驶信号仿真软件试验界面
[1]徐慧,杨凯,匡本刚,段守福.基于1553B总线的半实物仿真系统[J].火力与指挥控制,2011.
[2]杨冰,王鹏,基于反射内存的实时网设计[J].科技情报开发与经济,2011.
[3]李筱雅,尚丽娜,张芹芹.1553总线测试仿真系统设计与实现[J].现代电子技术,2012.
[4]李庭刚,谢廷毅,肖卫国,基于微机实时网半实物仿真系统数据通讯研究[J].计算机仿真,2011.
