一种改进的方差自适应滤波算法
2014-03-28骆荣剑李颖钱广华
骆荣剑,李颖,钱广华
(中国人民解放军重庆通信学院,重庆400035)
“当前”统计模型(“Current”Statistical model,CS)是目前公认的比较切合实际的一种运动模型[1],它是以修正的瑞利分布来描述机动加速度的当前概率分布,将当前加速度的预测值作为概率分布的均值以实现均值自适应滤波,同时又运用状态噪声方差与机动加速度方差的关系,实现了目标的方差自适应滤波。但是,CS模型的状态转移矩阵和加速度方差的计算,均依赖于两个预先设定的参数——机动频率和加速度极限值。当预先设定的参数值与目标的实际运动状态不一致时,将导致跟踪精度降低,甚至造成滤波算法的发散。为此,国内外学者采用了自适应技术来解决上述问题[2-12]。目前,比较典型的加速度方差自适应算法,主要基于加速度方差与加速度扰动增量间的线性关系[2-3,5-7],该方法虽在一定程度上提高了非机动或弱机动目标的跟踪精度,却降低了机动目标的跟踪精度;比较典型的机动频率和加速度方差同步自适应,主要基于模糊理论,该方法需构造隶属度函数,并且隶属度函数的构建仍需预先设定一些参数[4,8-12],因而相对比较复杂;比较典型的机动频率自适应算法,主要基于LMS(Least-Mean-Square)自适应滤波理论[6],该方法构建的LMS自适应滤波器,会不可避免的带来额外时延。
针对以上问题,本文在文献[6-7]的基础上,提出了一种改进的加速度方差自适应算法,仿真结果表明该算法提高了跟踪精度,明显改善了非机动或弱机动目标的跟踪精度。
1 “当前”统计模型自适应滤波算法
目标的离散状态方程为:

式中,X(k)=[x(k)x˙(k)x¨(k)]T,状态转移矩阵和状态输入矩阵分别为:

a(k)为机动加速度均值,W(k)是均值为零、方差为Q(k)=(k)q的白噪声序列。α为机动时间常数倒数,为机动加速度修正瑞利分布方差,q是一个与α和采样时间T有关的常数矩阵[6]
目标的观测方程为:

其中当仅含有噪声的目标位置数据可观测时,有

V(k)是均值为零,方差为R(k)的高斯观测噪声。
机动加速度方差自适应调整如下

“当前”加速度为正

在卡尔曼滤波过程中,参数α和加速度极限值的选择取决于目标机动情况,属于未知参数,随着α和加速度极限值的变化,公式(1)~公式(4)及公式(6)和系统噪声会发生相应变化。由于α和加速度极限值的取值一直以来主要依靠经验来确定,因而具有一定的局限性,如果在一定的跟踪精度内α和加速度极限值能够自适应的确定将使算法更有普适性。
2 改进的“当前”统计模型加速度方差自适应算法
本文IAVS算法对系统噪声方差的自适应是在分析了滤波中新息的变化与加速度增量关系的基础上得到的。
对于加速度方差,文献[2]在加速度方差与加速度扰动增量成线性关系的假设下给出了一种加速度方差自适应表达式:

其中Y(k)-H(k)X^(k|k-1)为卡尔滤波的新息。但该表达式一方面不能保证非负,另一方面如果采样频率过高,方差就会过大,例如在跟踪同一个常速运动目标时,当T=0.1 s时,加速度方差会比T=1 s大100倍,这显然是不合理的。为此,在加速度方差与加速度扰动增量成线性关系的假设下有

令C/T2=1得

由上式可见,k-1时刻到k时刻的预测估计值X^(k|k-1)没有考虑时刻k-1到k时刻之间的加速度扰动增量,而Y(k)是k时刻的观测值,其中包含了k-1时刻到k时刻加速度扰动对观测值的影响,因此可以由新息更加直接地表示加速度的扰动量。当目标机动时,新息增大,通过式(10)得到的加速度方差也相应增大,并使滤波增益值变大,从而提高了新息的重要性;当目标没有发生机动时,新息则相对很小,故下一时刻机动加速度方差较小,这符合σ2a的物理意义,表明了该方程式能正确反映目标的运动状态。新算法就是将加速度的变化改为新息变化来完成噪声方差Q(k)的自适应估计。
由基于“当前”统计模型的自适应卡尔曼滤波算法(AF)的滤波方程,再加上式(10)就构成了IAVS算法的整个过程。
3 仿真及结果分析
实验1:已有加速度方差自适应算法及本改进算法的仿真及结果分析
仿真场景:目标从起始位置x0=20 000 m沿轴正方向作初始速度为300 m/s的匀速直线运动,在[50T,150T]时间段内作加速度为20 m/s2的匀加速直线运动。其中采样周期T=0.1 s,量测噪声的模型为,假设观测噪声与距离的关系为V(k)=(βx(k)+Δx0)ω(k),其中ω(k)均值为0,方差为1正的态伪随机数,Δx0=100 m则R(k)=(βx(k)+Δx0)2E[ω2(k)]为噪声方差。机动频率分别取α=0.1。加速度极限值amax=10g m/s2,a-max=-10g m/s2,g=9.8 m/s2。
条件1:取α=0.1,β=0.001(低噪声水平)

图1 位移的一次仿真曲线Fig.1 A simulation curve of displacement

图2 速度一次仿真曲线Fig.2 Speed once the simulation curve
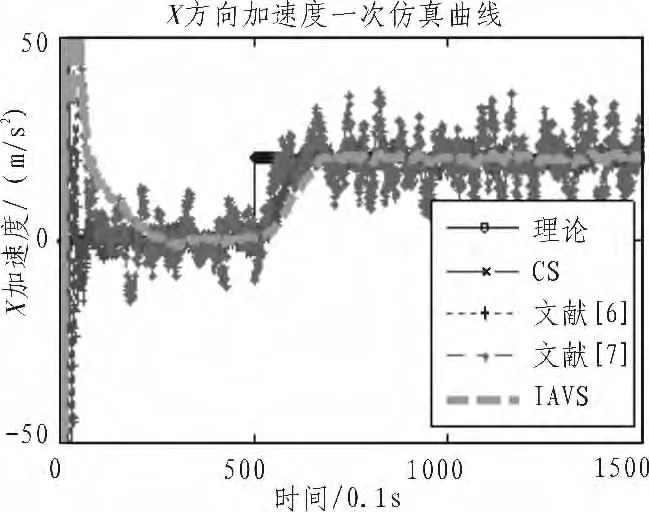
图3 加速度一次仿真曲线Fig.3 Acceleration time simulation curve
条件2:α=0.1,β=0.01(强噪声水平)

图4 位移滤波估计的均方根误差Fig.4 Displacement filter estimation RMSE
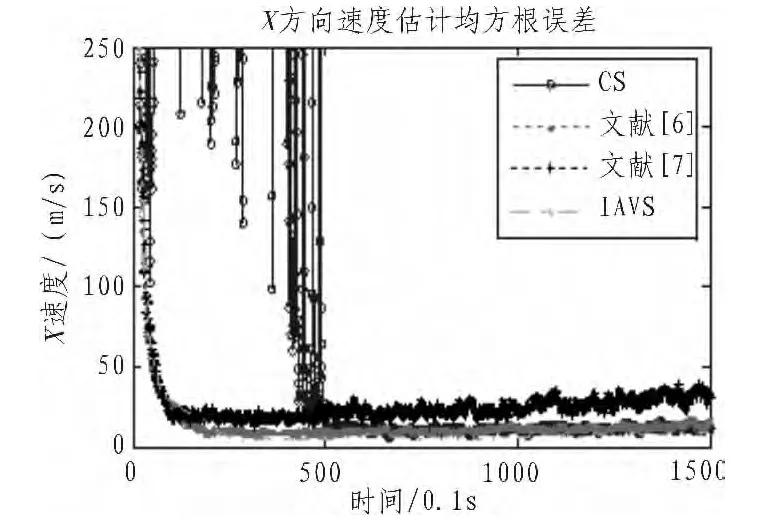
图5 速度滤波估计的均方根误差Fig.5 Speed filtering estimated RMSE

图6 加速度滤波估计的均方根误差Fig.6 Acceleration Filtering estimated RMSE

图7 位移一次仿真曲线Fig.7 Displacement time simulation curve
仿真结果分析:

图8 速度一次仿真曲线Fig.8 Speed curve of a simulation

图9 加速度一次仿真曲线Fig.9 A simulation acceleration curve

图10 位移滤波估计的均方根误差Fig.10 Displacement Filter Estimation RMSE
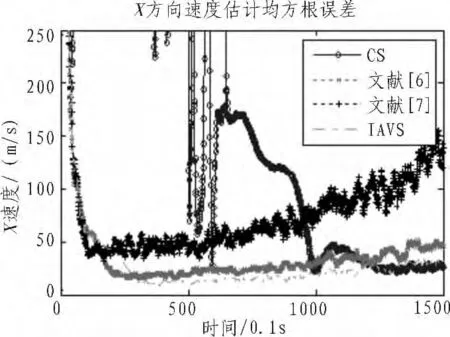
图11 速度滤波估计的均方根误差Fig.11 Speed filtering estimated RMSE
从以上的仿真结果可见,在条件1下的低噪声环境下,(图1~图3)的一次仿真曲线和(图4~图6)的均方根误差都表明,本文的加速度方差自适应算法(IAVS)较原有CS算法、文献[6]、文献[7]提出的算法精度得到了有效提高,解决了文献[7]所提算法方差过大的问题;在条件2的强噪声环境下,(图7~图9)的一次仿真曲线和(图10~图12)的均方根误差都表明,本文IAVS算法与原有CS算法、文献[6]、文献[7]提出的算法相比精度明显提高,说明本文算法的抗干扰能力得到了提升;综合以上两种条件下的实验结果表明,本文的IAVS算法无论在低噪声环境下,还是在强噪声环境下,跟踪精度较已有算法有明显提高。

图12 加速度滤波估计的均方根误差Fig.12 Acceleration Filtering estimated RMSE
4 结论
本文针对“当前”统计模型加速度极限值需要预先设定的问题,在已有加速度方差自适应算法的基础上,提出了一种改进的加速度方差自适应算法,该算法可明显提高目标的跟踪精度。其原因是本文的加速度方差自适应算法能更逼近加速度的真实分布。但从一次仿真图可见,本文的算法在加速度突变时会有延迟,下步将针对这一问题展开详细研究。
[1] 周宏仁,敬忠良,王培德.机动目标跟踪[M].北京,国防工业出版社,1991:134-176.
[2] 王芳,冯新喜,李鸿艳.一种新的自适应滤波算法[J].现代雷达,2003,7(7):23-35.WANG Fang,FENG Xin-xi,LI Hong-yan.A novel adaptive filtering algorithm[J].Modern Radar,2003,7(7):23-35.
[3] 陈出新,周德云,张堃.一种新的更好的基于“当前”统计模型的自适应滤波算法[J].西北工业大学学报,2011,29(3):351-355.CHEN Chu-xin,ZHOU De-yun,ZHANG Fang.A new and better adaptive filtering algorithm based on current statistical model[J].Journal of Northwestern Poly technical University,2011,29(3):351-355.
[4] 巴宏欣,赵宗贵,杨飞,等.机动目标的模糊自适应跟踪算法[J].系统仿真学报,2004,16(6):1181-1186.BA Hong-xin,ZHAO Zong-gui,YANG Fei,et al.Fuzzy adaptive tracking algorithm for maneuvering target[J].Journal of System Simulation,2004,16(6):1181-1186.
[5] 刘望生,李亚安,崔琳.基于“当前”统计模型的机动目标自适应强跟踪算法[J].系统工程与电子技术,2011,33(9):1937-1940.LIU Wang-sheng,LI Ya-an,CUI Lin.Adaptive strong tracking algorithm for maneuvering targets based on current statistical model[J].Systems Engineering and Electronics,2011,33(9):1937-1940.
[6] 张安清,文聪,郑润高.基于当前统计模型的目标跟踪改进算法仿真分析[J].雷达与对抗,2012,32(1):24-27.ZHANG An-qing,WEN Cong,ZHENG Run-gao.The simulation analysis of improved target tracking algorithms based on current statistical model[J].Rada&ECM,2012,32(1):24-27.
[7] 巴宏欣,何心怡,方正,等.机动目标跟踪的一种新的方差自适应滤波算法[J].武汉理工大学学报:交通科学与工程版,2011,35(3):448-452.BA Hong-xin,HE Xin-yi,FANG Zheng,et al.A new maneuvering target tracking variance adaptive filtering algorithm[J].Journal of Wuhan University of Technology:Transportationon Science&Engineering,2011,35(3):448-452.
[8] 钱华明,陈亮,满国晶,等.基于“当前”统计模型的机动目标自适应跟踪算法[J].系统工程与电子技术,2011,33(10):2154-2158.QIAN Hua-ming,CHEN Liang,MAN Guo-jing,et al.Maneuvering target adaptive tracking algorithm based on the“Current”Statistical model[J].Systems Engineering and Electronics,2011,33(10):2154-2158.
[9] 陈勇,董永强.基于“当前”统计模型的模糊自适应滤波算法[J].火力与指挥控制,2010,35(8):177-179.CHEN Yong,DONG Yong-qiang.Fuzzy adaptive filtering algorithm based on current statistical model[J].Fire Control&Command Control,2010,35(8):177-179.
[10] 罗笑冰,王宏强,黎湘,等.非线性“当前”统计模型及自适应算法[J].系统工程与电子技术,2008,30(3):397-403.LUO Xiao-bing,WANG Hong-qiang,LI xiang,et al.Nonelinear current statistical model and adaptive algorithm[J].Systems Engineering and Electronics,2008,30(3):397-403.
[11] 黄伟平,徐毓,王杰.机动目标跟踪的机动频率自适应算法[J].控制理论与应用,2011,28(12):1723-1728.HUANG Wei-ping,XU Yu,WANG Jie.A nonlinear maneuvering-tracking algorithm based on modified current statistical model[J].Control Theory&Applications,2011,28(12):1723-1728.
[12] 黄伟平,徐毓,王杰.基于改进“当前”统计模型的转弯机动跟踪算法[J].控制与决策,2011,26(9):1412-1416.HUANG Wei-ping,XU Yu,WANG Jie.Algorithm based on modified current statistic model for turn maneuver[J].Control and decision,2011,26(9):1412-1416.