单模光纤耦合控制器的LabVIEW程序设计
2014-03-28蒙治军盛洪江
蒙治军,盛洪江
(北方民族大学电气信息工程学院,宁夏银川750021)
该项目系基于单模光纤耦合效率自动控制系统设计项目的一个子项目,其中控制器及压电陶瓷挠性光学平台是该项目的关键部件,它决定着整个控制系统能否以亚微米精度尺度对激光光斑进行采集、跟踪、处理和显示,同时随着基于LabVIEW虚拟仪器技术的不断发展,尤其是程序代码的快速可构建性及功能强这两大特点[1],为此笔者应用该开发平台设计编制控制程序。本文主要对控制器平台的设计思路、程序编写、和工作原理进行分析,为全光纤激光雷达的实现和应用提供了可行的技术方案[2]。
1 控制要求及控制平台选择
NanoMax301三轴压电陶瓷挠性光学平台提供独立X、Y、Z 3个通道控制。由于在该研究课题中使用的单模光纤内径约为4微米,而平台的最大分辨率为20纳米[3],所以在光纤纤芯直径范围内可以搜索到大约200个采样点,我们的目的是通过闭环控制3个轴的位置来实现光斑最佳位置自动跟踪,控制精度约为0.05微米。下图1为NanoMax301系列三轴压电陶瓷挠性平台的、控制器实物图及LabVIEW控制界面图。

图1 三轴挠性光学平台NanoMax301、控制器BPC303实物图及LabVIEW仪器面板Fig.1 Three-axis Piezo flexure Max301 optical stage,BPC303 Controller and LabVIEW instrument panel
NanoMax301工作原理是基于压电陶瓷逆压电效应的。当陶瓷晶体置于外电场中晶体会发生形变,形变的大小和外电场强度的大小成正比。NanoMax平行挠性平台使用传统的多轴层叠式平台,由于两个驱动器接触过程中任何一个不以底座为参考的驱动器都会在装置内产生不必要的运动,从而产生了误差,因此将NanoMax系列平台的每个驱动器都直接耦合到平台底座上,将会消除这些不利影响。此外,该平台的控制精度与传统的多轴层叠式平台相比有很大的优势,故而本平台是亚微米运动控制应用场合的理想选择[4]。
压电控制器BPC303是专为纳米级运动控制场合所设计的高功率控制器,每通道可提供75 V/1 A。该装置还结合了最新的高速数字信号处理器(DSP)、低噪声模拟电子器件技术和ActiveX®软件技术,柔性控制每个轴的运动。此外,各控制轴电信号通过一个标准USB2.0口与PC机连接。手动控制都位于该控制器仪器面板上,允许使用数字编码调节旋钮手动调节压电陶瓷施加电压(去向NanoMax301)或位移传感器传输来的位置(来自NanoMax301)。仪器面板显示器由5位七段码组成,易于阅读,通过切换开关Volt/Micro设置为有七段码显示施加的电压(伏特)或位置(微米),该硬件面板还能实现开闭环切换及挠性平台置零[5]。表1给出了NanoMax300三轴挠性光学平台的机械参数及BPC303控制器的电参数。
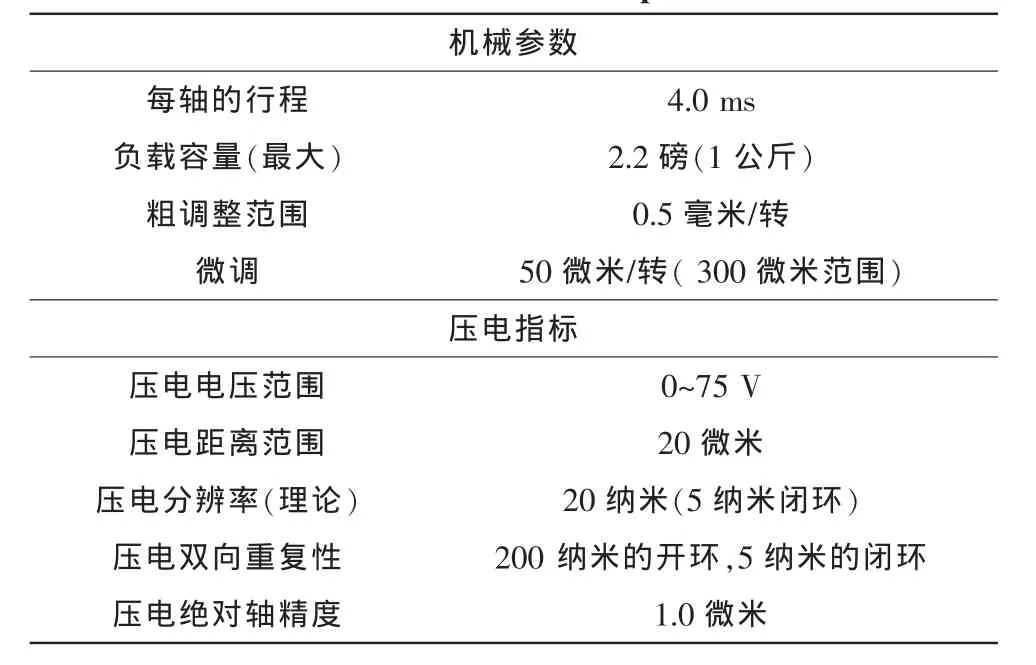
表1 Nano Max301三轴挠性光学平台机械参数及BPC303控制器的电参数Tab.1 Nano Max301 tri-axis optical stage mechanical and BPC303 controller electrical parameters
2 程序框图分析设计
基于LabVIEW操作简便、快速、扩展性强的优势[6],使用该平台对该控制器的进行程序设计是最佳的选择。整个程序框图采用平铺式顺序结构由四帧组成:
第一帧及第二帧对仪器面板ActiveX控件及指示控件进行初始化及逻辑定义。其中MG17Piezo是Piezo BPC303控制器自带的ActiveX控件,可由LabVIEW控件子选板ActiveX容器引入并完成对MG17Piezo控件的序列号设置及启动。如图2所示。
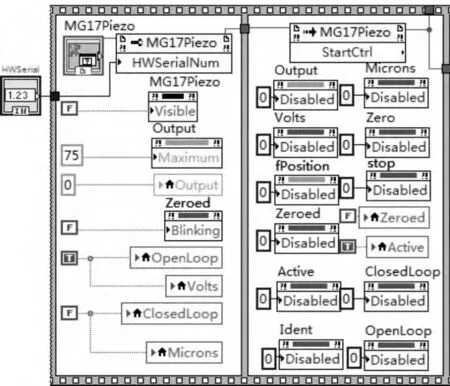
图2 第一帧及第二帧的程序框图Fig.2 The first and second frame of the block diagram
第三帧由while循环构建一个主循环,该循环里面包含了开闭环控制、置零和通道指示三个条件循环结构,如图3所示。
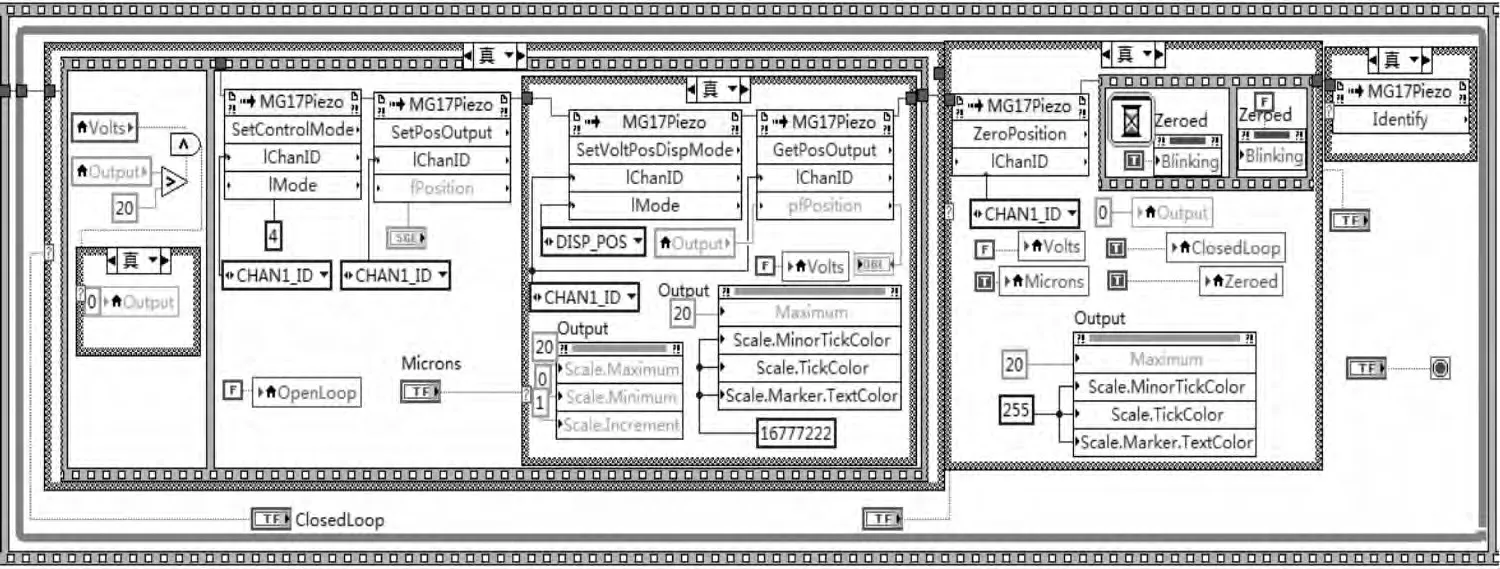
图3 第三帧while循环结构程序框图Fig.3 The third frame:while loop structure block diagram
图3左侧系闭环真分支,内含2帧平铺式顺序结构,其中第一支完成控制器电压值(Volts)与位置值(Microns)的平滑切换,第二支调用MG17Piezo控件方法即节点Set Control Mode、Set Pos Output、Set Volt Pos Dip Mode及Get Pos Output分别完成控制模式为通道一闭环、位置输出设置、显示模式为位置及获取位置输出;闭环假分支即开环时,程序框图如图4左侧所示,调用节点SetControlMode、SetVoltOutput、SetVoltPosDipMode及GetVoltOutput分别完成控制模式为通道一开环、电压输出设置、显示模式为电压及获取电压输出,设置输出为电压模式输出电压值。图4右侧系第2个条件结构,即控制器的置零复位程序,加入一个20 s时延,以保证控制器有足够的时间置零,在归零过程中,Zeroed控件一直处于闪烁显示状态,直到控制器置零完毕后停止闪烁。第3个条件结构是指示工作通道,此时控制器BPC303硬件仪器面板可闪烁指示之。
第四帧是结束程序帧,Piezo Active停止工作,所有控件设置为禁用变灰的状态,以便重启时所有控件处于使能状态。
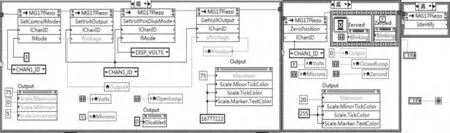
图4 第一分支结构为开环时程序框图及置零、通道指示Fig.4 Bolck diagram when the first branch if structure is open loop and the ones of setting zero,the channel indication
3 运行结果

图5 闭环及开环时仪器面板Fig.5 Instrument panel when the systemis set to closed or open loop sate
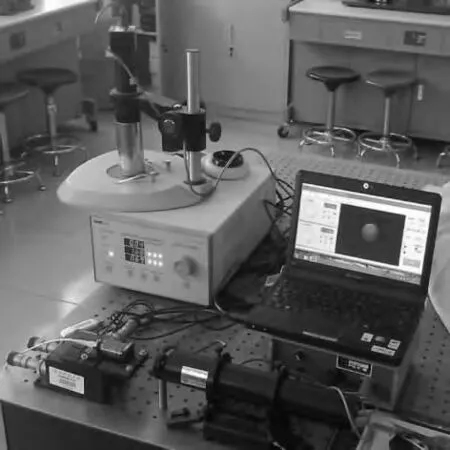
图6 单模光纤耦合效率自动控制系统样机及光斑自跟踪控制Fig.6 Prototype of SMF coupling efficiency automatic control system and laser spot self-tracking controlling
如图5所示是程序运行时控制器闭环对应的位置值及开环对应的电压值示意图;图6是笔者将上述控制VI应用于基于单模光纤耦合效率自动控制系统设计项目后控制器水平Y通道和垂直Z通道工作时采集到的激光的图像,经过分析,图中所示位置是耦合效率最大时的自跟踪位置,此时对应光斑最亮。
说明:本设计VI前面板控件之一旋钮系手动控制,应用时可连线PID反馈信号构成闭环位置控制系统。
4 结论
本课题设计了一种基于压电陶瓷的适合单模光纤耦合效率控制的亚微米级控制器,精度可达50纳米,为全光纤激光雷达系统等应用实现打下了技术基础。测试结果表明,该系统具有操作灵活控制精度高的优点,达到了设计要求。
[1] 特拉维斯,克林.LabVIEW大学实用教程[M].北京:电子工业出版社,2008.
[2] 阎吉祥,龚顺生,刘智深.环境监测激光雷达[M].北京:科学出版社,2001.
[3] THORLABS.HA0094T Rev.MAX300 Series NanoMax 3-Axis Flexure Stage User Guide.[EB/OL].(2013-7-19).[2013-8-13].http://www.thorlabschina.cn/Thorcat/10900/MAX 311D-Manual.pdf.
[4] 钱显毅,唐兴国.传感器原理与检测技术[M].北京:机械工业出版社,2011.
[5] THORLABS.HA0247T Rev C.BPC303 Benchtop Piezo Controllers User Guide[EB/OL].(2013-3).[2013-08-13].http://www.thorlabschina.cn/Thorcat/22800/BPC303-Manual.pdf.
[6] 孙秋野,柳昂,王云爽.LabVIEW8.5快速入门与提高[M].西安:西安交通大学出版社,2009.