扫描电机的PID恒速控制仿真及实验
2014-03-28姜涛张桂林李敏
姜涛,张桂林,李敏
(长春理工大学机电工程学院,吉林长春130022)
无刷直流电机(BLDCM)以其效率高、可靠性强、体积小等优点广泛运用于激光扫描装置中。然而BLDCM是一种非线性系统,动态特性复杂,其转速波动性极大地影响着扫描装置的检测精度。为了进一步获得BLDCM的稳定性,人们对其控制进行了广泛研究[1-4],但它们普遍存在控制原理复杂、过程繁琐等不足。文中以三相无刷直流电机为控制对象,旨在实现其恒速稳定运行,在建立电机运动模型的基础之上提出一种简单PID控制算法,利用Matlab仿真功能进行仿真,并通过STC89C52单片机搭建实验平台,进行控制策略的验证实验。
1 系统数学模型
1.1 BLDCM的数学模型
已知电机驱动系统采用两两导通方式,在传统假设前提下[1-2],得电机电压平衡方程为:

式中,ua、ub、uc为相绕组电压,Rs为电阻,ia、ib、ic相绕组电流,L为相绕组自感,M为两相绕组之间的互感,ea、eb、ec为相绕组反电势。
实际情况中,BLDCM中性点悬空,在工作过程中必然存在三相导通的情形。显然式(1)无法很好地描述电机实际运转情况,为更好地描述BLDCM实际运行情况,假设中性点电压为u,则式(1)变为:

可得:

考虑逆变器中功率管的影响,将功率管等效成RLC电路,则其电压降为:

电机输入电压为:ui=u-ud。
电磁转矩方程及运动方程分别为[3]:
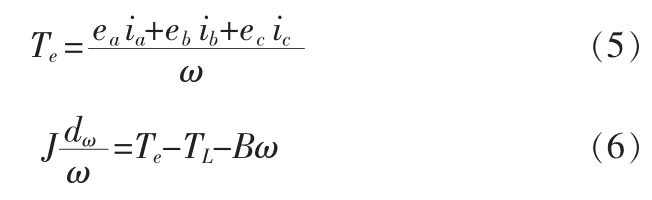
其中,Te为电机电磁转矩,Te为电机负载转矩,J为电机转子转动惯量,B为阻尼系数,ω为电机转速。
1.2 PID控制算法模型
在扫描电机恒速控制中,PID是最常用的控制方法。单片机通过离散PID实现对扫描电机的恒速控制,离散PID表达式为[4-5]:

式中:k为采样序号,u(k)为第k次采样输出量,ek为第次采样偏差值,KI为积分系数,KD为微分系数。
当存在ek转速偏差时,PID控制算法通过对KP、KI、KD3个参数的调整实现对电机恒速运动的目的。
当偏差ek较大时,取较大的比例系数KP和较小的微分系数KD系统将获得较快的响应速度,同时为了避免积分饱和,应限制积分系数KI的大小或者使其为零;当偏差ek中等大小时,取较小的比例系数KP,合适的微分系数KD和积分系数KI即可获得较小的超调量;当偏差ek较小时,取较大的比例系数KP和积分系数KI即可使系统获得良好的稳态性能,同时取合适的KD值即可避免平衡点的震荡现象。
对式(7)进行一次递推得:

用式(7)减式(8),则有:

式(9)为本文针对BLDCM所采用增量式PID控制算法表达式。显然,在恒定采样周期下,将所得前后3次偏差带入式(9)即可得出控制增量。
2 基于Matlab的系统仿真
2.1 BLDCM仿真模型的建立
反电动势的求取是BLDCM仿真模型建立的难点,通常情况下,将各相反电动势视为梯形波[6]。利用Look-up table模块给定单位反电动势,再乘以反电动势系数即可得反电动势。
依据上述反电动势建立理论,以其中A相为例,结合式(2)、式(3),可得得电机电压平衡仿真模型如图1所示。
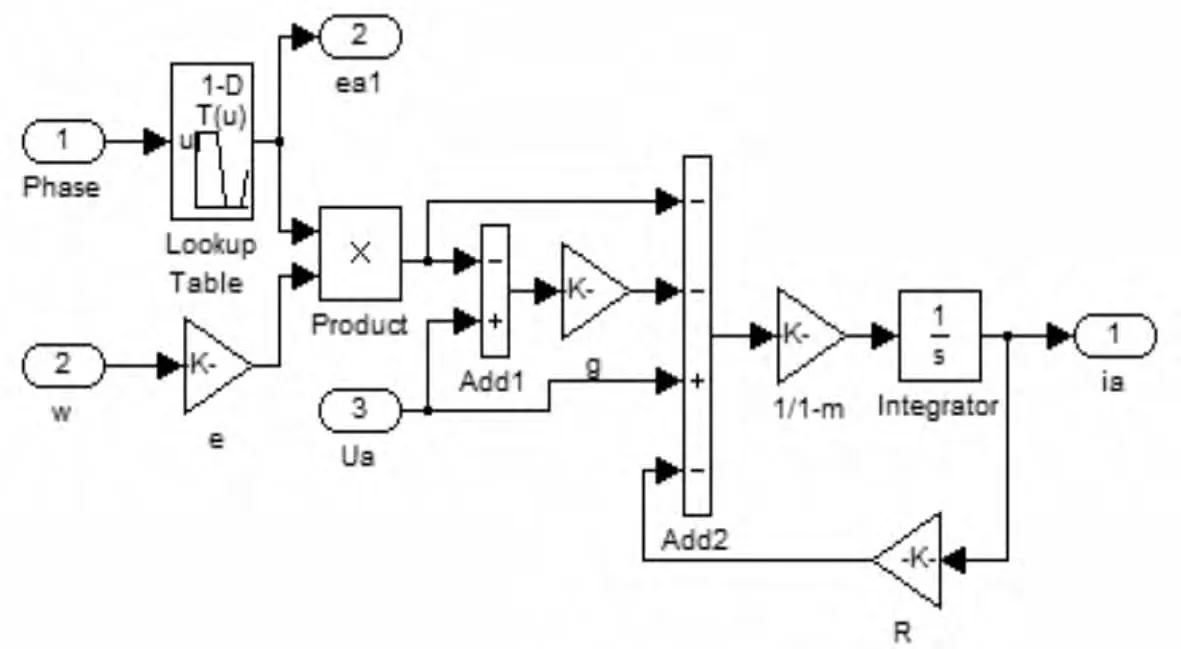
图1 电压平衡仿真模型Fig.1 Balance of voltage simulation module
由式(5)、式(6)得BLDCM电磁转矩及机械运动仿真模型如图2所示。
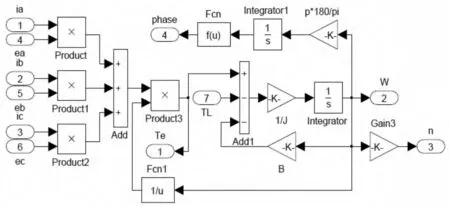
图2 电磁转矩及运动仿真模型Fig.2 Electromagnetic torque and movement simulation module
BLDCM换相是由转子位置信号决定,功率开关受转子位置信号控制[7-8]。将转子信号周期化,假如在一个方向转动,转子在不同位置功率开关导通关系如表1所示。利用Matlab Simulink逻辑关系工具建立功率管开关导通与相位角度之间关系。
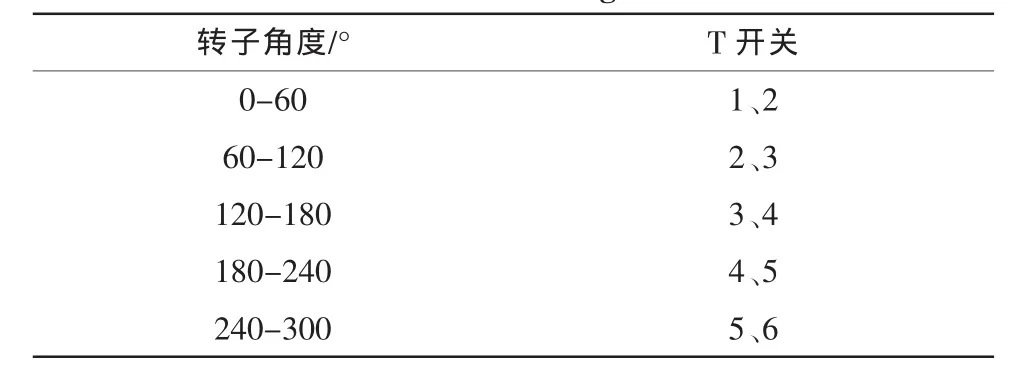
表1 功率开关顺序与角度表Tab.1 The sequence relationship between power switching and corner angle
作为BLDCM功率变换装置的逆变器,在仿真过程中,使用Simulink逻辑模块和SimPowerSystems工具箱实现逆变器的仿真,其具体仿真模型如图3所示。
将上述各模型进行整个得到BLDCM仿真模型如图4所示。
2.2 电机转速仿真
利用上述模型进行仿真,其的目在于确定PID算法的3个参数,进而运用于BLDCM的实际控制中。
电机参数为:电阻Rs=0.42 Ω,电感L=0.894 mH,互感M=0.243 mH,极对数P=4,转动惯量J=0.063 N·m,阻尼系数B=5.73×10-4N·m,额定电压24 V,负载转矩0.027 N·m,给定转速1 500 rpm。PID参数整定采取实验法,遵循“先比例,再积分,最后微分”的原则,通过多次试验确定比例系数KP=8,积分系数KI=2,微分系数KD=0.1,采样周期T=0.001 s。得速度仿真曲线如图5所示。
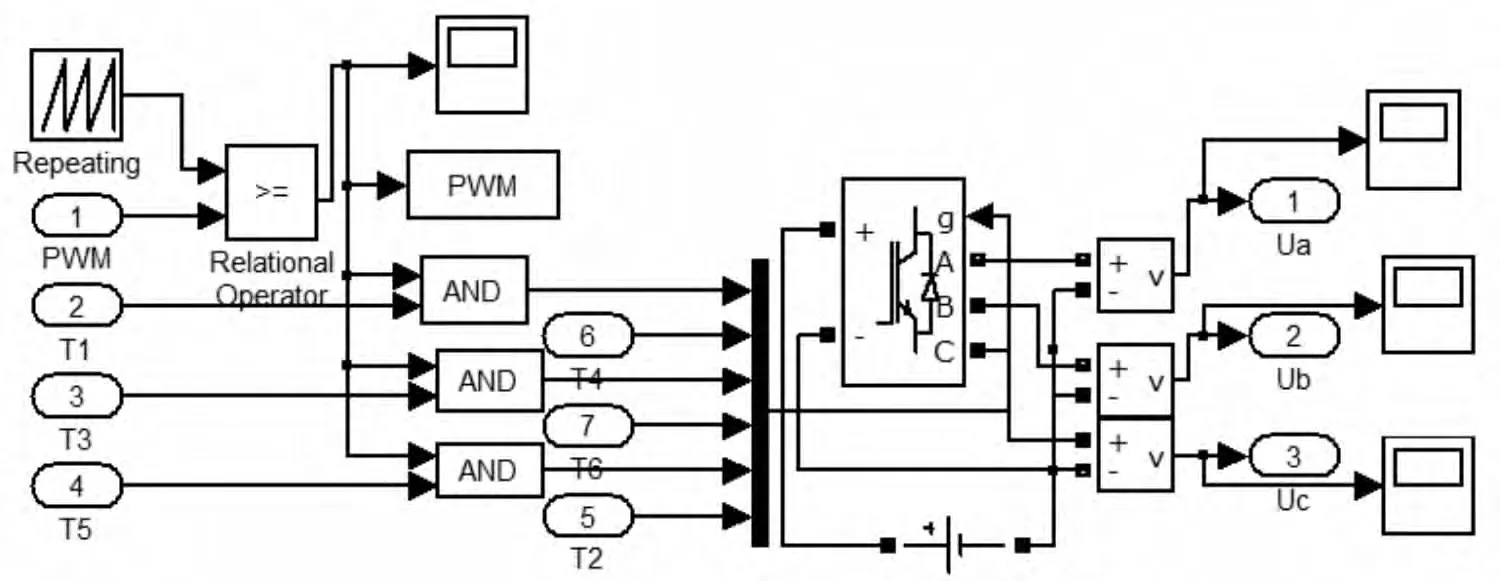
图3 逆变器仿真模型Fig.3 Inverterm simulation module
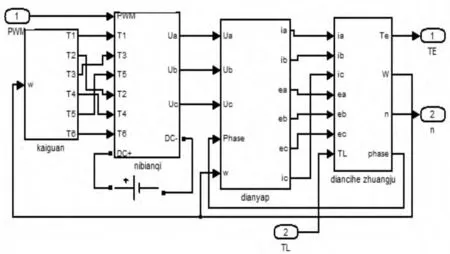
图4 BLDCM整体仿真模型Fig.4 System simulation module of BLDCM
由图5可知,在负载作用下,电机具有较快的响应,且转速无明显波动,说明在该系统下,通过此PID控制,能够实现扫描电机的恒速控制。下面将通过实物实验对该控制方法进行验证。
3 基于单片机的扫描电机恒速控制
如图6所示,扫描电机恒速控制系统主要由单片机及其外围电路、参数设置及键盘电路、显示电路、BLDCM驱动器组成。其中,BLDCM采用PWM驱动,PWM信号由单片机通过PID调节[9]给出。本系统采用相对于其他单片机STC89C52单片机具有成本低、操作简单、兼容性强等优点的STC89C52单片机作为微处理器进行扫描电机控制及其它处理工作。
工作时,通过键盘给定转速、旋转方向后,向驱动器发出使能EN指令以及旋转方向FR指令;电机运转,通过霍尔信号的变化得出转速,驱动器将转速信号传送给单片机,单片机显示转速,并通过PID调节PWM占空比实现电机的恒速旋转。其中PID实现部分代码如下:

图5 电机转速仿真图Fig.5 Speed simulation
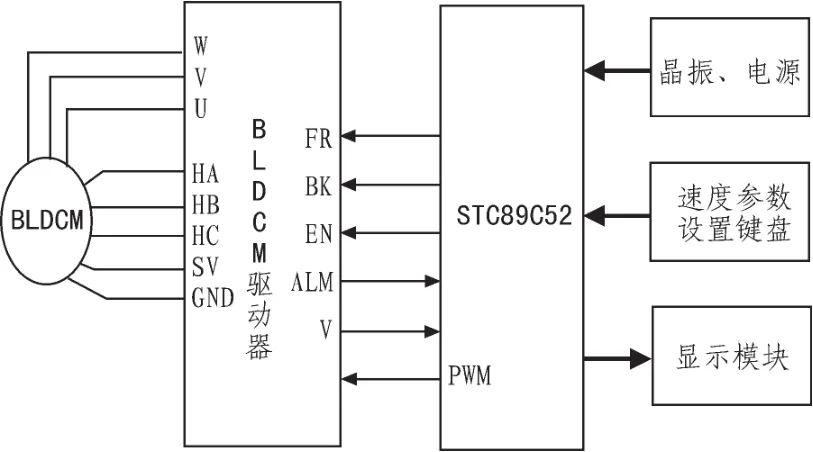
图6 STC89C52控制结构图Fig.6 System control structure of STC89C52
void PID_C(void)
{
Ek=Ref-Fbe;//误差值
if(fabs(Ek)<Error_min);//是否调整
{
PID_OUT=0;//误差较小,不调整
}
else
{
PID_out=KP*(Ek-Eb)+KI*Ek+KD*(Ek+Eb-2Ed);//PID计算
Ed=Eb;//Eb前1次误差值
Eb=Ek;//Ed前2次误差值
PID_OUT=int(PID_out);//调整量
if(PID_OUT>=D_max);//调整上极
PID_OUT=D_max;//调整最大值
f(PID_OUT<=D_min);//调整下限
PID_OUT=D_min;//调整最小值
}
PWM_OUT+=PID_OUT;//新PWM
if(PWM_OUT>PWM_max);//上限
PWM_OUT=PWM_max;//输出上限
if(PWM_OUT<PWM_min);//下限
PWM_OUT=PWM_min;//输出下限
}
4 结论
文中以考虑中点电压的BLDCM新型数学模型为基础,在Matlab Simulink环境下建立BLDCM仿真模型,并通过PID控制实现电机的恒速控制,最后提出了以SCT89C52单片机为核心处理器的扫描电机恒速控制方法。相对与传统复杂的恒速控制方法,文中所述增量式PID控制方法具有简单、可操作性强、成本低等优点,实践也证明这种方法是有效的。
[1] 赵云凯.基于神经网络控制器的直流无刷电机控制系统研究[D].哈尔滨:哈尔滨工程大学,2009.
[2] 董正良.无刷直流电机BP神经网络控制的研究[D].西安:西安电子科技大学,2010.
[3] 陈伟,周小波,王群京.基于模糊优化的PID直流无刷电机控制[J].电子设计工程,2010,18(6):146-149.CHEN Wei,ZHOU Xiao-bo,WANG Qun-jing.PID brushless DC motor control system based on fuzzy aptimized[J].Electronic Design Engineering,2010,18(6):146-149.
[4] 曾光华.无刷直流电机模糊神经元PID算法研究[D].株州:湖南工业大学,2012.
[5] 秦刚,谭进,吴丹怡,等.内模PID控制器在无刷直流电机调速系统中的应用[J].电子设计工程,2012,20(12):42-45.QIN Gang,TAN Jin,WU Dan-yi,et al.Application of IMCPID controller in a brushless DC motor speed control system[J].Electronic Design Engineering,2012,20(12):42-45.
[6] 陈强.无刷直流电机系统的仿真研究[J].现代雷达,2011,33(7):56-59.CHEN Qiang.A study of brushless DC motor simulation[J].Moder Radar,2011,33(7):56-59.
[7] 吕伟鹏.无刷直流电机双闭环串级控制系统仿真研究[J].电子设计工程,2011,19(24):30-34 LV Wei-peng.Research of simulation for brushless DC motor with dual closed-loop cascade control system[J].Electronic Design Engineering,2011,19(24):30-34.
[8] 卿浩,辜承林,唐小琦,等.无刷直流电机模糊控制系统的建模及仿真分析[J].微电机,2006,39(3):19-62.QING Hao,GU Cheng-lin,TANG Xiao-qi,et al.Modeling and simulation analysis of fuzzy control system of brushless DC motor[J].Micromotors Servo Technique,2006,39(3):19-62.
[9] 周云端,何志勇,赵瑞国.基于遗传算法的加速度控制PID参数自整定研究[J].火箭推进,2012(4):68-71.ZHOU Yun-duan,HE Zhi-yong,ZHAO Rui-guo.Study on genetic algorithm based auto-tuning of acceleration control PID parameters[J].Journal of Rocket Propulsion,2012(4):68-71.