基于条纹丢失补偿的自混合干涉位移测量算法
2014-03-25叶会英朱君瑶王珍雪
叶会英,朱君瑶,王珍雪
(郑州大学 信息工程学院,河南 郑州450001)
0 引言
光反馈自混合干涉(OFSMI)(即自混合干涉)是指激光器输出光经外部反射体反射或散射后,其中一部分光又反馈回激光器谐振腔,反馈光与腔内光相混合,从而调制激光器输出光[1]. 由于OFSMI 信号携带了外部反射体和激光器自身参数的信息,并且系统装置简单,所以近年来很多学者应用光反馈自混合干涉系统对物体位移[2-4]、距离[5]、速度[6]、加速度[7]及激光器自身参数[8]等的测量进行深入的研究.
笔者基于Lang-Kobayashi 方程建立的OFSMI数学模型[9]:
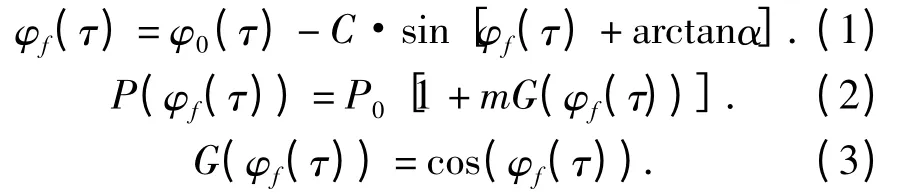
式中:α 是半导体激光器线宽展宽因数;φ0(τ)=ω0τ,φf(τ)=ωfτ;ωf(τ)、ω0(τ)分别是有光反馈和无反馈时激光的角频率;φf(τ)、φ0(τ)分别为有光反馈和无光反馈时的激光器外腔相位;τ =2L/c,L 是外腔长度,c 是光速;C 是光反馈水平因子;P(φf(τ))和P0分别是有光反馈和无光反馈时半导体激光器的输出功率;m 为调制系数(典型值为m≈10-3);G(φf(τ))是干涉函数,它体现了外腔光相位对激光输出功率的影响.
C 是模型中的重要参数,当C <1 时,光反馈水平较弱,为弱光反馈;当1 <C <4.6 时,为适度光反馈;在弱光反馈和适度光反馈的情况下不会出现条纹丢失现象,此时可利用条纹计数法来测量物体的位移;当C >4.6 时,为强光反馈,此时会出现条纹丢失现象[10].本文研究C >4.6 条件下的条纹丢失规律,并进行条纹丢失补偿算法的研究,提高测量的精度.
1 条纹丢失规律
通过对高反馈水平因子条件下的自混合干涉信号进行行为分析[11],发现当C <1 时,φ0和φf成一一对应的关系,此时OFSMI 信号为正弦波信号,和传统干涉条纹一致;当1 <C <4.6 时,φ0和φf之间的关系变得比较复杂,一个φ0对应着3 到5 个φf,此时OFSMI 信号为锯齿波信号;当C >4.6时,一个φ0对应5 个甚至更多φf,如图1 所示,此时,OFSMI 信号会出现条纹丢失现象.
设外部物体做正弦波运动,研究高反馈水平因子条件下的自混合干涉条纹丢失规律的步骤:
第一步,选取φf=19,即外腔的移动位移为一个定值,然后分别令C =4,4.7,4.8,5,6,7.9,8,9,所对应的OFSMI 信号如图2 所示.从图2 中可以得出,对于确定的φf值,φf=19,在半个周期内条纹的数目N 随C 值的变化情况:当C <4.8时,N=6;当4.8≤C <5 时,N =5;当5≤C <7.9时,N=4;当7.9≤C <9 时,N=3.

图1 当C=0.5,3 ,10 时,φf与φ0的关系Fig.1 Relationship between φf and φ0where C=0.5,3,10
第二步,改变φf的值,取φf=25,按照上述的方法,令C =4,4.7,4.8,5,6,7.9,8,9,所对应的OFSMI 信号如图3 所示.从图3 可以得出,当C <4.6 时,N=8;当4.6≤C <4.8 时,N=7;当4.8≤C <7.9 时,N=6;当7.9≤C <9 时,N=3.
在实验中,物体位移最大约10 μm,对应的外腔相位变化最大约160 rad,所以在φf为(0,160)的范围内,随机取100 个值,按照上述的方法研究在半个周期内,条纹丢失数目m 随着C 的变化规律为:C <4.6,m=0;4.6≤C <4.8,m=1;4.8≤C<7.9,m=2.

图2 φf =19 时C 取不同值对应的OFSMI 信号Fig.2 Simulated OFSMI signals with different C values corresponding to φf =19

图3 φf =25 时C 取不同值对应的OFSMI 信号Fig.3 Simulated OFSMI signals with different C values corresponding to φf =25
2 位移重构
光反馈自混合干涉的基本规律是:当φf(τ)有2π 相位的变化(即外腔移动半个光波波长λ0/2)时,则G(τ)产生一个周期波动的信号,称之为一个整数条纹;小于2π 相位的φf(τ)的变化,所产生的G(τ)变化量,称之为小数条纹. 因此把φf(τ)的变化Δφf(τ)分为两部分,记做:Δφf(τ)=AI+AD. 其中,AI为整数干涉条纹所对应的相位,AI=2Nπ,N 为整数条纹的个数;AD为小数条纹所对应的相位.物体位移D(t)与外腔相位变化量Δφf(τ)之间的关系为[12]
D(t)=Δφf(τ)×λ0/(4π). (4)
利用锯齿段的最小二乘线性拟合,可得出小数条纹G(AD)表达式为[13]
G(AD)= -0.95 +0.39AD. (5)
由实验的自混合干涉信号测得G(nA)和G(nB)如图4 所示.

图4 外腔正弦振动信号及其对应的自混合信号Fig.4 Sinusoidal displacement of an external object OFSMI signal
把G(nA)和G(nB)代入G(AD),可计算出相应的小数相位,分别记做ADA和ADB,则一个小数条纹所对应的相位为(ADA+ADB)/2.
在适度光反馈及强光反馈下,利用条纹计数法测量物体位移时,把得到的OFSMI 信号进行微分处理,得到正负脉冲信号D(n),如图5 所示.图中正脉冲表示物体沿正方向移动,负脉冲表示物体沿反方向移动.在没有考虑条纹丢失情况时,位移算法的流程图为图6[14].
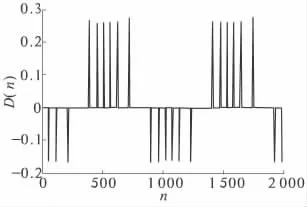
图5 OFSMI 信号进行微分得到的正负脉冲信号Fig.5 Differential signal of the OFSMI signal
用s(n)表示检测到的脉冲信号的正负,n 表示检测到的脉冲数目,n =1,2,3,… . 当s(n)=1,表示检测到的第n 个条纹是正脉冲;s(n)=-1,表示检测到的第n 个条纹为负脉冲.
对正负脉冲信号进行检测,当s(n)等于s(n-1),表示脉冲的方向没有发生改变,此时用s(n)* 2π 表示,输入到累加模块中;当s(n)不等于s(n-1),表示脉冲的方向发生改变,则表示为s(n)* [2π +(ADA+ADB)/2],(ADA+ADB)/2 表示一个小数条纹代表的相位,输入到累加模块中,把累加模块中的数据求和,然后乘上λ0/(4π)得到物体的移动位移D(t).

图6 未考虑条纹丢失的位移算法Fig.6 The displacement algorithm without considering the fringe-loss
为提高条纹计数法测位移的精度,则需考虑条纹丢失并进行条纹丢失补偿,重构位移算法的模式加入虚框图中的系数.
当检测到的s(n)不等于s(n -1),表示检测到的脉冲信号的方向发生改变,此时要对丢失的条纹进行补偿,有s(n)* [(1 +m)* 2π+(ADA+ADB)/2],m 表示半个周期内条纹丢失的数目,输入到累加模块中,把累加模块中的数据求和,然后乘上λ0/(4π)得到物体的位移D(t).
3 实验结果
在仿真实验中,分别取C =4.7 和C =7 时,对算法1(未考虑条纹丢失所测位移)和算法2(考虑条纹丢失并进行补偿所测位移(位移重构))进行对比,如表1 所示.
从表1 可得出,在未考虑条纹丢失时,所测得的物体的移动位移与实际位移相差较大,精度不高;考虑条纹丢失现象并进行补偿时,测得的物体的移动位移与物体的实际位移相差约0 ~0.2 μm,测量的精确度有了很大的提高. 笔者提出的算法更适合用于条纹计数法测量物体的位移.
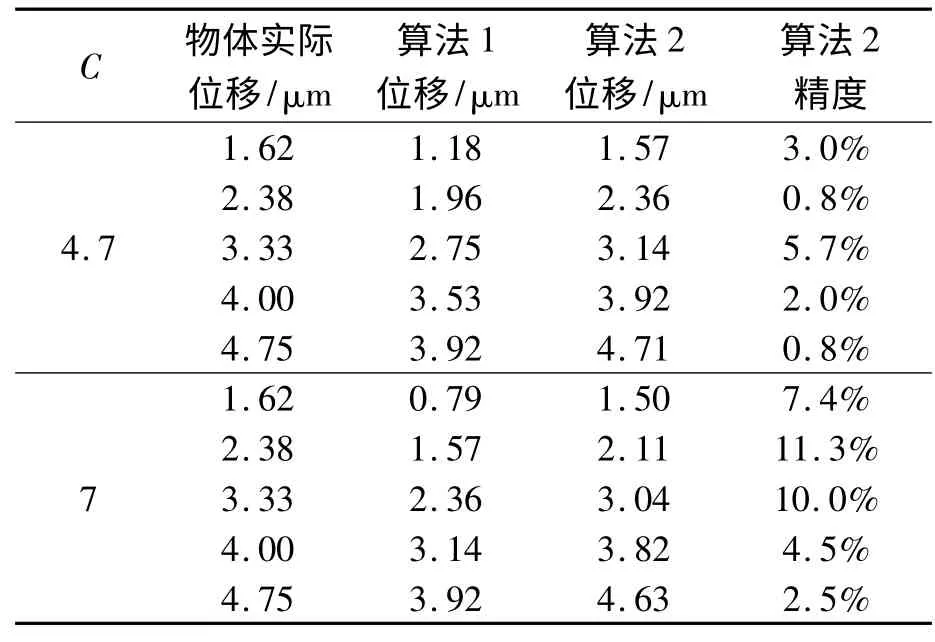
表1 C=4.7,7 时算法1 和算法2 的比较Tab.1 Comparison of algorithm 1 and 2 with C=4.7,7
4 结束语
在高反馈水平因子条件下,会出现条纹丢失现象,此时利用条纹计数测位移的精度比较低.本文研究了在0 <C <7. 9 范围内,条纹丢失的条数,并在重构位移时进行条纹丢失补偿,同时本文提出的算法考虑到小数条纹所代表的位移,使得测得的物体位移更精确,为下一步高光反馈水平因子条件下的其他研究奠定了基础.
[1] 赵岩,禹延光,叶会英. 基于光反馈自混合干涉的对称折叠算法的精度分析[J]. 激光技术,2009,33(4):387 -390.
[2] 杨振宇,王鸣,夏巍,等. 正弦相位调制自混合干涉大范围位移测量精度测试与分析[J]. 光学学报,2013,33(4):0412007(1 -7).
[3] 杨颖,李醒飞,寇科,等. 全相位谱分析在自混合干涉位移测量中的应用[J]. 光学精密工程,2012,20(8):1740 -1746.
[4] ZABIT U,BERNAL O D,BOSCH T. Mixing laser sensor for large displacement signal recovery in the presence of speckle[J]. IEEE Sensor Journal,2013,13(2):824 -831.
[5] 胡险峰. 用激光二极管自混合干涉测量距离[J].物理实验,2013,33(1):26 -29.
[6] 张照云,高杨,赵兴海,等. 半导体激光自混合变速测量的离散Chirp -Fourier 变换方法[J]. 红外与激光工程,2012,41(4):1074 -1077.
[7] 杨颖,李醒飞,李洪宇,等. 基于激光自混合效应的加速度传感器[J]. 光学学报,2013,33 (2):0228003(1 -7).
[8] 张玉燕,胡伟,监雄,等. 一种自混合干涉位移测量系统中参数C 的测量方法[J]. 光电子·激光,2013,24(6):1150 -1157.
[9] BES C,PLANTIER G,BOSCH T. Displacement measurements using a self-mixing laser diode under moderate feedback[J]. IEEE Transactions on Instrumentation and Measurement,2006,55(4):1101 -1105.
[10]ZABIT U,BONY F,BOSCH T. A self-mixing displacement sensor with fringe-loss compensation for harmonic vibrations[J]. IEEE Photonics Technology Letters,2010,22(3):410 -412.
[11] YU Yan-guang,XI Jiang-tao. Optical feedback selfmixing interferometry with a large feedback factor C:behavior studies[J]. IEEE Journal of Quantum Electronics,2009,45(7):840 -848.
[12]MAGNANI A,NORGIA M,PESATORI A. Optical displacement sensor based on novel self-mixing reconstruction method[C]//IEEE SENSORS 2010 Conference.Kona,KI:IEEE Press. 2010:517 -520.
[13]禹延光,郭常盈,叶会英. 基于适度光反馈自混合干涉技术的振动测量[J]. 光学学报,2007,26(8):1430 -1434.
[14] SERVAGENT N,GOUAUX F,BOSCH T. Measurements of displacement using the self-mixing interference in a laser diode[J]. Optical,1998,29(6):168 -173.
