简易风洞控制系统设计
2014-03-22黄从贵吴孔培
黄从贵,吴孔培
(无锡职业技术学院物联网技术学院,江苏无锡 214121)
简易风洞控制系统设计
黄从贵,吴孔培
(无锡职业技术学院物联网技术学院,江苏无锡 214121)
以单片机MSP430F149为核心设计简易风洞控制系统,利用超声波传感器实时测量小球高度,根据误差产生由PID算法控制的PWM脉冲,实现对直流电机转速的控制,使小球稳、快、准地在预定的轨迹上运动。模块化设计,输入系统采用独立式键盘,设定工作模式,输出系统采用LCD液晶模块,实时显示小球状态信息。
MSP430F 149;PWM波;PID算法
一、前言
风洞,是以人工的方式产生并控制气流,用来模拟飞行器或实体周围气体的流动情况,并可量度气流对实体的作用效果以及观察物理现象的一种管道状实验设备。风洞是进行空气动力研究最常用、最有效的工具,它除了主要应用于汽车、飞行器、导弹等设计领域,也适用于建筑物、高速列车、船舰的空气阻力、抗压实验等。本系统是2014年TI杯大学生电子设计竞赛的项目,可应用于简易风洞中位置控制的自动控制装置或设备。
简易风洞系统的结构如图1所示,由圆管、连接部与直流风机构成,其控制系统调节直流风机的转速使小球在风洞中按指定的轨迹运动(主要是小球的稳、快、准的控制)。
二、理论分析与计算
实现本系统的关键在于建立数学模型,稳、快、准地控制电机风扇风力的大小来改变小球在风洞中浮动的高度。
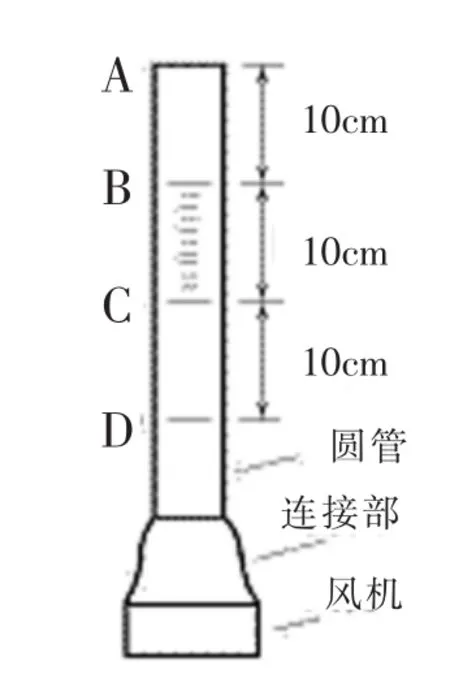
图1 简易风洞系统结构图
(一)直流电机控制
根据电机学可知,直流电机转速n的计算公式为:n=(U-IR)/(Kф)式中,U为电枢端电压,I为电枢电流,R为电枢电路总电阻,ф为每极磁通量;K为电动机结构参数。
可以看出,直流电机转速和U、I有关,并且可控量只有这两个,同时I又可以通过改变U进行间接改变,所以直流电机的控制方法比较简单,归根结底只需要调节电机的电压U来改变转速,电压U越高则电机转速越高,风扇风力就越大。
(二)PWM调速原理
直流电机的电枢电压调节通过脉宽调制原理(PWM)来实现,即使加在直流电机两端的电压为方波形式,通过改变方波的占空比来实现对电机转速的调节。
当开关管的驱动信号为高电平时,开关管导通,直流电机电枢绕组两端有电压Us。t1秒后,驱动信号变为低电平,开关管截止,电动机电枢两端电压为0。t2秒后,驱动信号重新变为高电平,开关管的动作重复前面的过程。
则直流电机的电枢绕组两端电压平均值Uo为:Uo=(t1×Us+0)/(t1+t2)=(t1×Us)/T=DUs式中,D为占空比,D=t1/T。(0≤D≤1)。
本系统利用MSP430F149中Timer A的比较模式做PWM发生器,将管脚第二功能TA1或TA2配置成输出,用增计数配合PWM方式6(即toggle/ set),其周期和占空比可变。此时,PWM周期即CCR0,占空比即CCR1或CCR2的值。用户可以通过软件任意改变占空比和周期,不需要过多占用CPU开销。
(三)PID控制算法
为了实现稳、快、准地控制风洞中小球的高度,在改变PWM波形占空比之前,需要对小球的高度偏差进行PID运算。PID控制就是根据系统的误差,利用比例(P)、积分(I)、微分(D)计算出控制量进行控制的。模拟PID控制的数学模型可以用微分方程来表示。
由于计算机只能处理数字量,不能对连续变化的模拟量直接进行运算,所以在单片机控制系统中必须对模拟PID控制算法进行离散化处理,采用数字式的差分方程,如下所示:
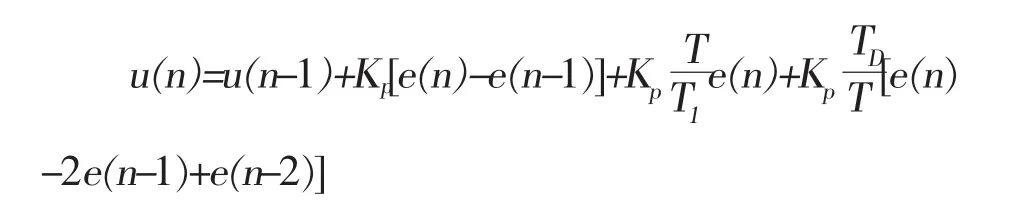
式中,u(n)为n时刻调节器的输出量,e(n)为n时刻调节器的偏差量;
Kp为比例系数,TI为积分时间常数,TD为微分时间常数。

式中,P、I、D分别为比例系数、积分系数、微分系数。
比例(P)控制对系统误差瞬间做出快速反应;积分(I)控制的作用是消除静态误差;微分(D)控制的作用是改善动态特性。为了防止突发情况下,系统对直流电机的控制崩溃,程序中对PID控制量设置了最大值umax和最小值umin。由于单片机的处理速度和RAM资源的限制,本系统不采用浮点数运算,而将所有参数全部用整数,采用增量式PID控制算法,大大提高了运算速度,见图2。

图2 增量式PID控制算法流程图
三、控制系统设计
(一)总体方案
整个系统采用性价比较高的单片机MSP430F 149;小球高度检测采用经典的HC-SR04型超声波传感器;按键采用独立键盘;显示采用带汉字库的LCM12864模块;直流电机驱动采用高耐压、大电流达林顿管ULN 2003;风力控制采用性价比高的直流电机;风扇采用带通风通道的风流,风力集中,能很好地吹到小球。整个系统由单片机最小系统模块、键盘显示模块、高度检测模块、电机驱动模块与稳压电源模块组成。系统的结构框图如图3所示。

图3 简易风洞控制系统结构框图
(二)单片机最小系统模块
如图4所示,单片机MSP430F149作为本设计的控制核心,其最小系统模块包括:单片机、电源电路、时钟电路、复位电路以及JTAG调试接口。
MSP430F149芯片是美国TI公司推出的具有16位总线的超低功耗微处理器,有60KB+256字节FLASH,2K字节RAM,低电压供电,资源丰富,性价比高。
本系统以+5V直流电压源Vcc为输入电压,Vcc经过电压转换芯片AS1117产生+3.3V;采用8MHz的外接高速晶振和32.768KHz的外接低速晶振。MSP430F149复位电路采用上电按键复位,低电平复位。MSP430F149内部集成了JTAG模块,通过14针的JTAG调试接口可以实现CPU程序仿真、在线调试等功能。
(三)高度检测模块
超声波传感器HC-SR04模块对小球进行实时测距,获得准确的小球高度数据,传送给单片机MSP430F149进行分析处理。
HC-SR04模块性能稳定,测度距离为2cm~450cm,精度可达0.2cm。其基本工作原理如图5所示:
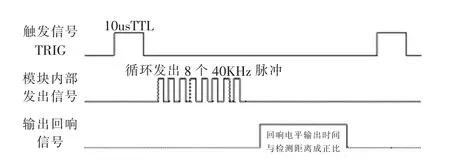
图5 超声波时序图
图5超声波时序图
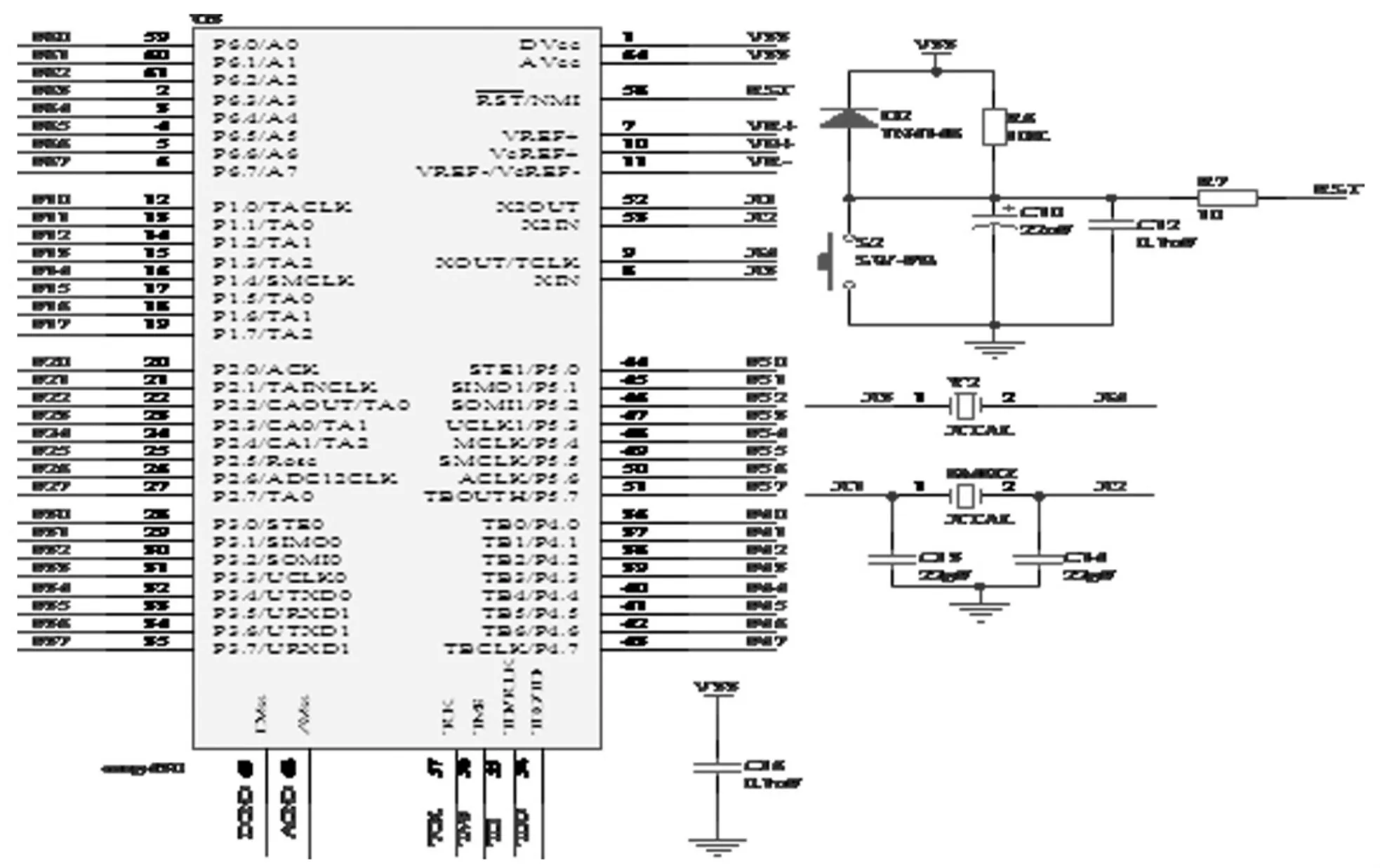
图4 单片机最小系统电路图
(1)模块先通过I/O口TRIG触发测距,并给出至少10us的高电平(TTL)信号;
(2)然后模块自动发送8个40KHz的方波,并自动检测是否有信号返回;
(3)若有信号返回,则通过I/O口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。
测试距离=(高电平时间*声速(340m/s))/2。
(四)软件设计
软件设计基于Code Composer Studio IDE集成开发环境和Keil C51语言。软件模块主要有:主函数、高度检测子函数、PWM调速子函数、PID控制子函数、键盘显示子函数。系统主函数流程图如图6所示,定时调用超声波测距子函数判断小球的高度,PID控制子函数对小球当前高度与设置高度进行差值计算,得出输出控制量,再调用PWM调速子函数调整直流电机转速,改变风扇风力,同时调用键盘显示子函数完成控制系统的输入输出。

图6 系统主函数流程图
四、结束语
对于PID控制系统,实现“稳、快、准”的控制效果与PID控制参数紧密相关,所以PID参数的整定和选择是本系统的核心。本系统中,先采用基于MATLAB语言仿真系统初步整定PID控制参数,观察系统的响应情况,再结合工程整定法调节相应参数比例度,反复调试,直到达到控制指标为止。结果证明,笔者设计的PID控制系统结构简单、超调量小、响应时间短、误差小,同时在PID算法程序控制、实时误差处理上,对自动化控制设备或装置开发应用具有一定的借鉴意义。
[1]Dodson,MG.?An Historical and Applied Aerodynamic Study of the Wright Brothers'Wind Tunnel Test Program and Application to Successful Manned Flight[R].?US Naval Academy?Technical Report.2005.
[2]Barlow,J.B.Rae,W.H.and Pope.A.Low speed wind tunnel testing[J].John Wiley&Sons,Inc.1999.
[3]华成英,童诗白.模拟电子技术基础[M].北京:高等教育出版社,2006.
[4]胡寿松.自动控制原理[M].北京:科学出版社,2013.
[5]洪利.MSP430单片机原理与应用实例[M].北京航空航天大学出版社,2010.
[6]赵静,张瑾.基于MATLAB的通信系统仿真[M].北京航空航天大学出版社,2010.
(编辑:林钢)
Design of Simple Wind Tunnel Control System
HUANG Cong-gui,WU Kong-pei
(School of the Internet of Things,Wuxi Institute of Technology,Wuxi,214121,China)
The control system of a simple wind tunnel is designed with an MSP430F149 single chip computer as the core component.The system measures the real-time height of the small ball using ultrasonic sensors,and produces PWM pulses controlled by the PID algorithm according to the error,which in turn control the speed of DC motor and keep the small ball moving stably,fast,and accurately on a predetermined trajectory.The system is an example of a modular design.It uses a separate keyboard as the input system,sets working mode,and uses LCD module as the output system to display real-time information of the ball’s state.
MSP430F 149;PWM wave;PID algorithm
TP 273
A
1671-4806(2014)06-0109-03
2014-10-18
2014年TI杯大学生电子设计竞赛的项目
黄从贵(1977—),男,安徽桐城人,讲师,硕士,研究方向为电子信息、自动控制;吴孔培(1982—),男,河南信阳人,讲师,硕士,研究方向为电子信息、通信技术。