增量式光电编码器角位移拟合测速法
2014-03-22胡建华王慎航
王 辉,胡建华,王慎航
(1.中国科学院自动化研究所,北京 100190;2.北京信息科技大学自动化学院,北京 100192)
0 引言
增量式光电编码器因其可靠性高、抗干扰性强、分辨率高、成本低、易维护等特点广泛应用于伺服系统中电机的测速。增量式编码器是将位移转换成周期性脉冲的数字量传感器[1]。编码器码盘上刻有光栅,当电机旋转带动同轴编码器转动时,就会产生A、B两相互差90°的正交脉冲信号,通过测量码盘脉冲信号的频率或周期可以得到电机的速度。光栅越密,码盘的分辨率越高。因此为提高测量分辨率,往往将A、B两相信号进行四倍频[2]。文中提到的码盘脉冲均指A、B两相信号进行四倍频后的脉冲信号。在电机高速转动时,码盘脉冲频率很高,因此在固定采样周期内用测频率法(又称M法)测量速度精度较高,而在电机低速时,码盘脉冲周期变长,用测周期法(又称T法)测速精度较高[3]。但无论是M法或T法都无法实现在全量程范围内的高精度测速,而且测量的都是一段时间内电机的平均速度,而非采样时刻的即时速度,特别是对非匀速情况,测量误差较大。为了解决这一问题,出现了M/T法和变M/T法[3-4],在一定程度上提高了测量的精度,但得到的仍是测量时间的平均速度。双采样率观测法[5]针对超低速时测速提出了采用2个采样率估计速度,对高速时没有讨论。
由于码盘脉冲实质上是角位移信号,因此文中提出一种通过测量码盘脉冲时刻角位移,进行角位移拟合,进而求在采样时刻速度的方法,来得到采样时刻的即时速度,避免由于平均速度带来的误差。
1 传统方法测速原理与误差分析
1.1M法测速
直接测量电机速度的方法主要有M法、T法和M/T法,M/T法是M法和T法的结合。文中主要讨论M法和T法。M法又称频率法,其测速原理如图1所示,在固定的采样周期Tc内计数码盘脉冲个数m1,从而得到电机速度。

图1 M法测速原理
M法测量速度计算公式为:
(1)
式中:m1为采样周期内码盘脉冲的个数;Tc为采样周期,s;Z为电机每转1圈输出的码盘脉冲个数;n为电机转速,r/min.
设码盘分辨率为每转10 000个脉冲,即Z=10 000,采样周期Tc为1 ms,则采样周期内1个码盘脉冲对应转速为6 r/min.M法测量的分辨率就是6 r/min,因此其测量的速度存在6~12 r的误差。相对误差为速度误差值与速度之比,即

(2)
若要求相对误差小于1%,则m1要大于100,对应速度要大于600 r/min,低于此速度用M法则无法满足误差要求。因此M法不适合在低速时的速度测量。
1.2T法测速
T法测速原理如图2所示,在一个码盘脉冲周期内,通过计数基准时钟个数来测量码盘脉冲的周期,进而得到电机速度。

图2 T法测速原理
T法测量速度计算公式为:
(3)
式中:f0为基准时钟频率,Hz;Z为电机每转1圈输出的码盘脉冲个数;m2为在一个码盘脉冲周期内时钟脉冲的个数;n为电机转速,r/min.
测量的相对误差为:
(4)
设时钟脉冲为1 MHz,Z=10 000时,n=6 000/m2,若要求相对误差小于1%,则m2要大于101,对应的电机速度为60 r/min以内。在超过这个转速的中、高速时,用T法测得速度将无法满足误差要求。
2 角位移拟合法测速原理
M法是对码盘脉冲输出的角位移信号进行差分计算,近似求出采样周期内的平均速度,而T法通过测量一个码盘脉冲宽度求电机转速,得到的也是在此码盘脉冲周期内的平均速度。

s=at2+bt+c
(5)
将t2、t1点和t3、t2点代入式(5)相减得到式(6)和式(7):
(6)
(7)
将式(6)和式(7)合写出矩阵形式:
v=6w=12at+6b
(8)
将采样脉冲时刻代入速度函数中,可以得到采样点的即时速度,而非采样周期内的平均速度,这样会减少由差分运算带来的误差。
3 算法仿真与结果分析
在匀速和匀加速下对生成的码盘脉冲信号进行测速仿真实验,对比M法、T法和角位移拟合法的测速误差曲线。为了方便讨论算法本身的误差,忽略实际码盘由于加工精度和转动时机械振动等因素导致的随机噪声等干扰。设码盘为2 500线,四倍频后每转1圈输出10 000个脉冲,采样周期为1 ms.
在电机匀速运转时,设速度为411 r/min,则每个码盘脉冲周期为6/411 ms,由M法、T法和角位移拟合法计算的电机速度曲线如图3所示,误差曲线如图4所示。
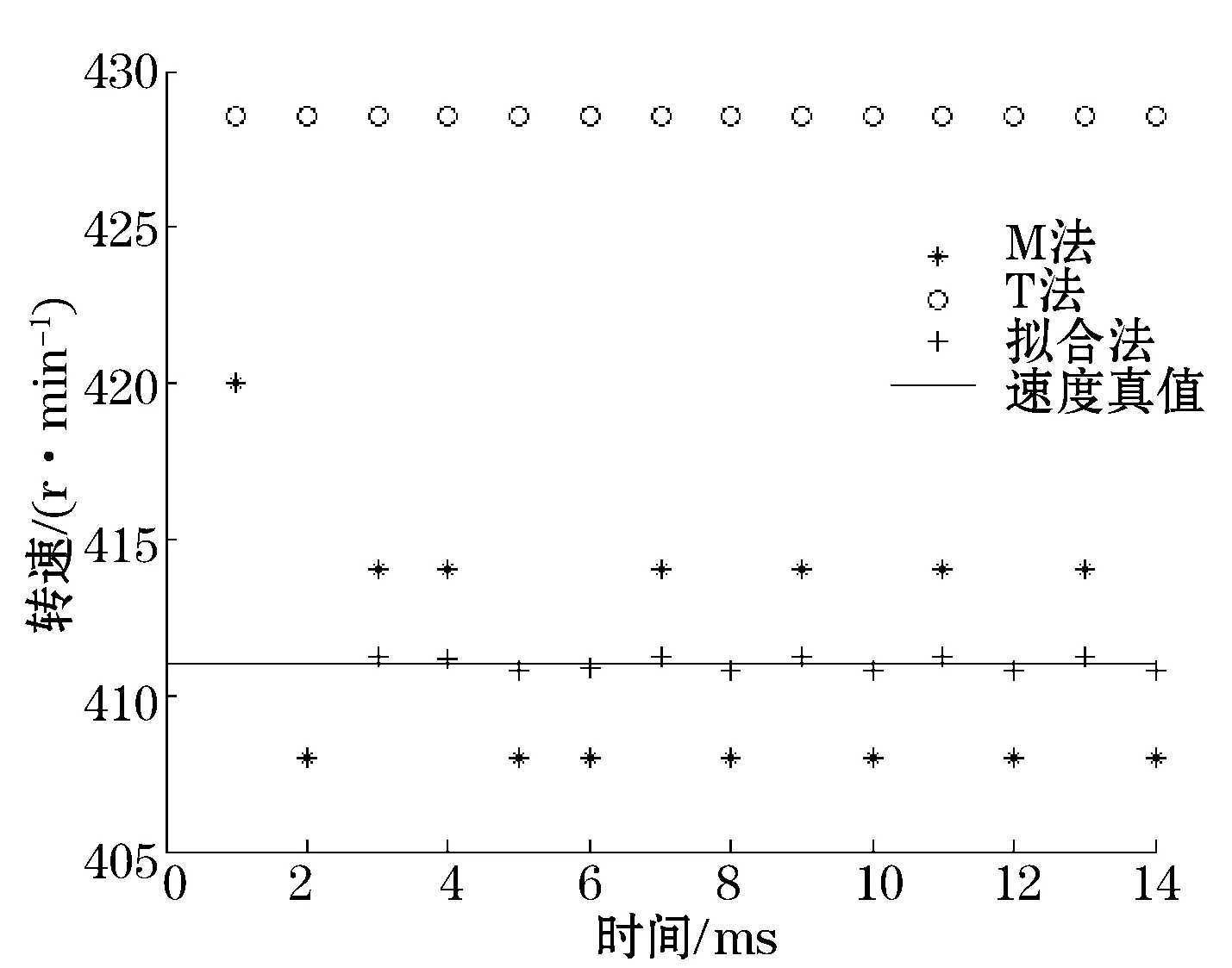
图3 411 r/min匀速下M法、T法和角位移拟合法速度曲线
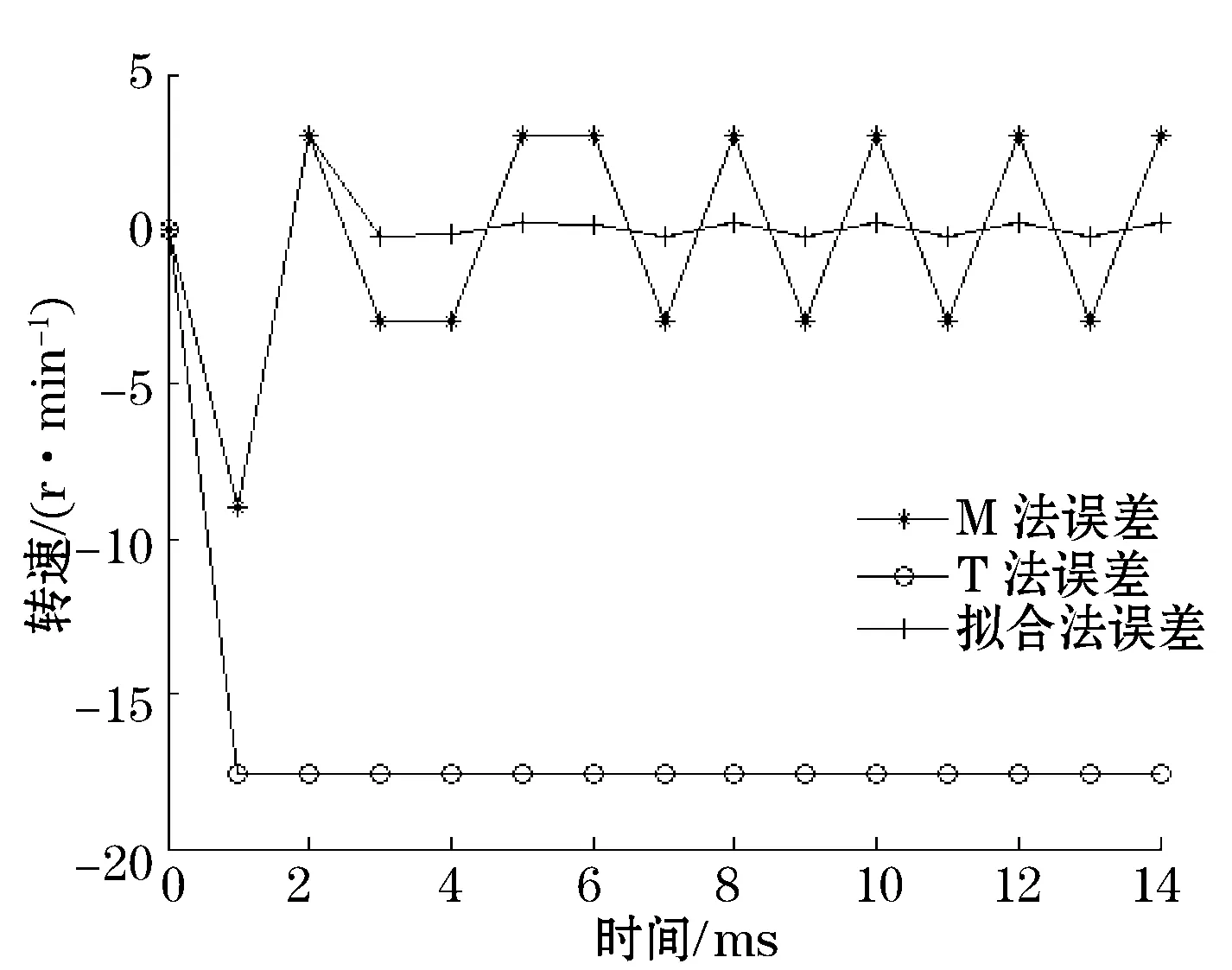
图4 匀速下M法、T法和角位移拟合法速度误差曲线
在电机匀加速运转情况下,设第一个码盘脉冲时刻为900 μs,第二个码盘脉冲时刻为1 400 μs,计算得到加速度为21.3 r/ms(此加速度数据只作测速算法比较,未考虑电机实际机械性能限制),生成每个码盘脉冲时刻,由M法、T法和角位移拟合法计算的电机速度曲线如图5所示,误差如图6所示。

图5 匀加速下M法、T法和角位移拟合法速度曲线
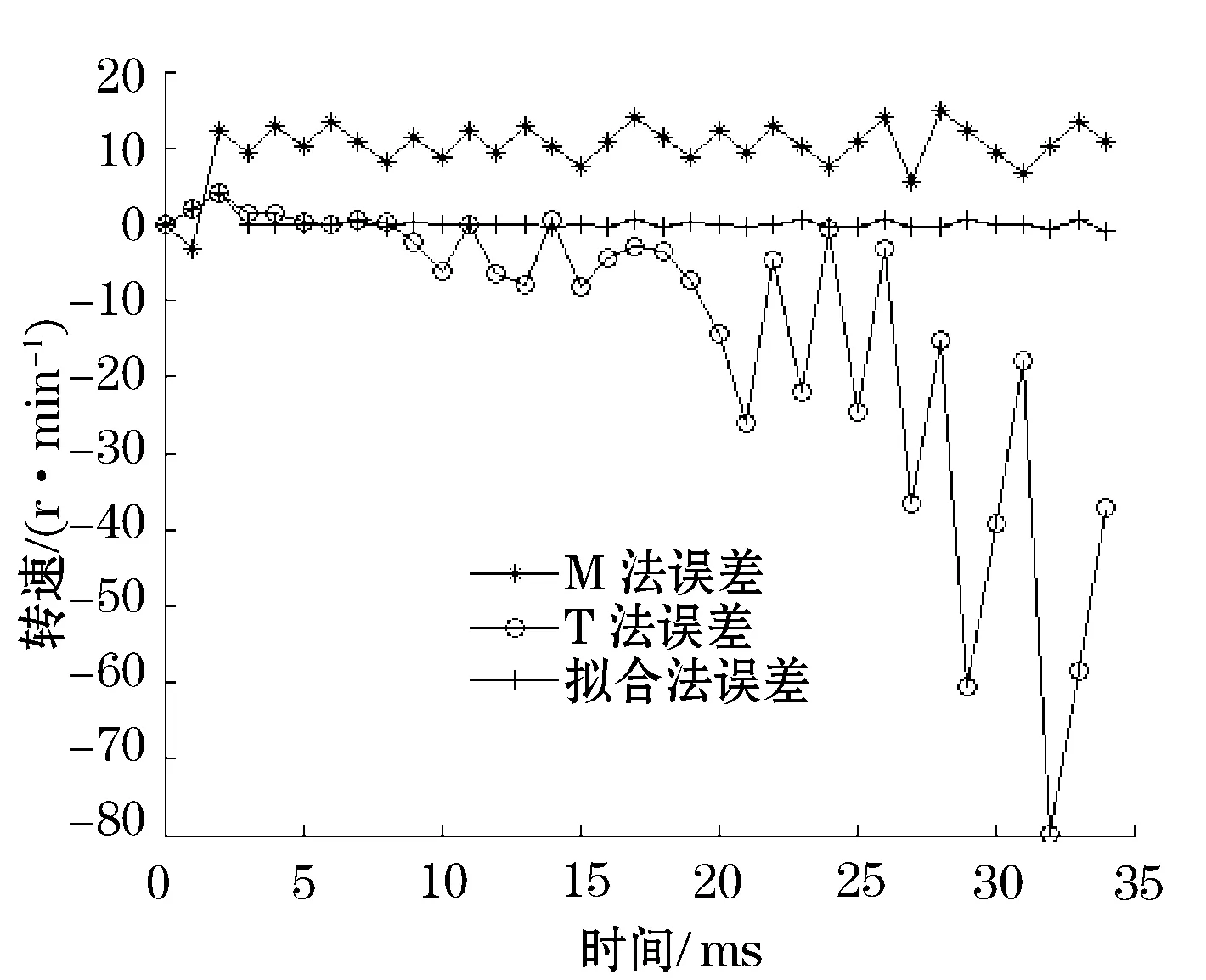
图6 匀加速下M法、T法和角位移拟合法速度误差曲线
角位移拟合仿真算法中采用每个采样周期前一个码盘脉冲时刻为拟合点,每连续3个点进行拟合,得到角位移曲线系数a和b,再用式8计算采样时刻的速度。由于最初的3个点无法通过拟合法得到,这3个点用M法或T法测得。从仿真结果看,无论匀速或匀加速下,角位移拟合的误差都远小于M法和T法,而且对于低速和高速范围获得了很好的误差一致性,是全速度范围下都适用的测速方法。
4 结束语
角位移拟合法通过角位移拟合求出位移函数,再对位移函数求导,可以得到采样时刻的即时速度。对于数控机床、机器人等高性能伺服控制系统,电机常处于加减速中,减少由平均速度引入的误差对精确控制意义重大。角位移拟合法具有全量程范围内的高精度和误差一致性,可以使伺服控制系统获得更加精确的反馈输入,从而降低速度调节器的输出波动,提高全数字伺服系统的控制精度和性能。
参考文献:
[1]肖博,李剑锋,陈洪芳,等.多通道绝对式光电编码器数据采集系统.仪表技术与传感器,2013(1):27-29.
[2]蒋利兵,张玉,吴刚.基于CPLD 的编码器信号处理电路设计.仪表技术与传感器,2012(4):91-93.
[3]石忠东,陈培正,陈定积,等.高精度数字测速及动态位置检测算法.清华大学学报(自然科学版),2004,44(8):1022-1024.
[4]孙和平,白晶.M/T法高精度数字测速器参数选择及设计.电气传动自动化,1998,20(4):82-85.
[5]KOVUDHIKULRUNGSRI L,KOSEKI T.Precise sрeed estimation from a low-resolution encoder by dual-samрling-rate observer.IEEE/ASME Trans on Mech,2006,11(6):661- 670.
作者简介:王辉(1977-),讲师,博士研究生,主要研究领域永磁同步电机控制。E-mail:whui@bistu.edu.cn
