无人机载SAR实时信号处理系统设计∗
2014-03-21郝慧军
郝慧军
(中国电子科技集团公司第三十八研究所,安徽合肥230088)
0 引言
近年来,无人机载SAR由于在战场监视、敌情侦察和精确打击等方面表现出色,已成为世界各国发展无人机侦察装备的重要方向[1]。由于无人机侦察遥测系统能够进行战场前沿侵入式侦察,在执行作战任务时无人员损伤、连续作战性强,且无人机具有体积小、造价低、使用方便、对作战环境要求低、战场生存能力强等优点,各国对无人机侦察遥测系统作为军队战斗力倍增器的作用与地位及潜在的军事价值取得了共识,从而为其迅速发展提供了强大的动力。无人机载SAR因其全天候、全天时、远距离高分辨成像的特点,必将成为未来战争中实现“零伤亡”侦察的重要手段。
SAR实时成像系统可在无人机飞行过程中,采用并行处理算法和多片DSP同时对SAR原始回波数据进行处理,从而在无人机上完成图像处理,利用大压缩比的遥感图像压缩技术,减轻数据传输和存储系统的压力;另一方面,连续实时成像,得到即时的SAR图像,可以达到实时监测、及时了解无人机飞行状况并寻找感兴趣目标(区域)进行相应处理。
本文从无人机载SAR实时处理系统硬件和实时成像算法软件两个方面进行了分析,给出了设计方案及飞行试验验证结果。
1 实时处理系统组成
由于SAR信号处理数据量大,同时为了降低无人机受气流的影响,提高系统的鲁棒性,在实时处理中必须采取比较复杂的运动补偿算法。这就要求实时处理系统具有强大的运算性能。采用多片高速DSP芯片,配合优化的拓扑结构,可以从根本上解决运算量巨大这个问题[2]。
因为SAR原始数据处理是按照每条距离线和方位线进行处理的,每条“线处理”具有相对独立性,这样N个DSP可以并行处理L/N条属于自己的方位线和距离线(L是处理的距离向或方位向长度)[3]。针对SAR信号处理的这一特点,同时考虑到无人机对空间结构、重量的限制要求,我们所构建的实时处理系统由一块标准3U的ADC采集接口板和两块标准6U的信号处理板组成,每块信号处理板分成两个节点,每个处理节点包括2片TS201,1片FPGA,2 GB的SDRAM以及一片CPLD,并共享总线。单个节点完成一幅SAR原始数据的成像处理任务,节点内的两个DSP并行“线处理”,其系统结构如图1所示。

图1 系统结构图
ADC采集接口板实现对模拟信号的采集,通过RS422串口接收外部控制命令及惯导数据,并上报当前状态信息;通过LVDS接口发送图像数据。
信号处理板选用的DSP芯片是ADI公司的TS201,单片处理能力3.6 GFlops,内核时钟频率600 M Hz,片内内存24 Mbit,125 M Hz/64 bit片外总线,具有1 GB的SDRAM访问能力,还有4个Link口,每个Link口收发独立,最高带宽1.2 GB/s[4]。因此,系统总处理能力为8×3.6=28.8 GFlops,可以满足实时成像处理的运算要求。
ADC采集接口板对模拟信号采集,FPGA把回波数据一方面通过2个LVDS接口直接把数据发送到记录仪,另一方面把回波数据通过2个Link发送到TS201处理板0和1的Link Switch,分别由其转发到处理节点0的DSP0和DSP1,然后再由DSP0和DSP1分别通过板内直连Link转发到节点1的DSP0和DSP1,以实现回波数据向各个DSP的传输。
利用ADC采集接口板和TS201信号处理板共享的FPDP总线分别自定义了FIFO总线、DPRAM总线、维护总线。FIFO总线用于每个信号处理板把处理图像发送到ADC采集接口板,DPRAM总线用于ADC采集接口板把通过RS422串口收发的各类辅助数据与2个信号处理板之间通信,维护总线用于ADC采集接口板对信号处理板的BIT监测、维护等操作。
每个TS201信号处理板的各个DSP的处理图像数据通过板内直连Link汇总到DSP0,由其通过Link发送到Link Switch,Link Switch再通过FIFO总线汇总到综合IO板的FPGA,由FPGA通过LVDS接口转发到记录仪。
ADC采集接口板的FPGA把通过RS422串口获取的辅助数据通过DPRAM总线发送到每个TS201处理板的Link Switch,由其转发到DSP2,再由DSP2通过板内直连Link转发到其他DSP。
ADC采集接口板的FPGA通过维护总线与每个TS201信号处理板的Link Switch相连,Link Switch又与FPGA0和FPGA1相连。在TS201信号处理板内,Link Switch通过对FPGA0和FPGA1的操作可实现对板卡DSP加载、FPGA加载和DSP工作状态的监控,以及把DSP加载文件写到FLASH的操作。因此,通过维护总线,可实现把系统内各种BIT信息通过ADC采集接口板的RS422串口上报,也可实现外部监控通过RS422串口对系统进行烧写程序、发送命令等操作。
2 实时成像算法
SAR成像主要是对回波信号进行距离、方位维的聚焦处理,同时还要进行距离徙动校正。在实际情况中,无人机载SAR由于气流不稳定的影响,运动的不稳定性较大,如果不采取运动补偿,则所录取的数据受到不稳定因素的影响会有较大的失真,从而使成像质量下降,甚至不能成像。因此,需要在成像算法中嵌入运动补偿部分。
机载SAR的运动补偿主要有基于仪表测量和基于信号处理。基于仪表测量的运动补偿主要依靠载机的惯性导航系统(INS)和全球定位系统(GPS),用以测定载机的精确位置[5-6]。其优点是运动补偿算法简单,但实际情况下,通常的仪表测量精度以及数据率难以满足高分辨率成像的要求。信号处理中的自聚焦技术能将仪器难以检测的快速扰动的影响加以补偿,因此通过信号处理作运动补偿是另一种方式,但该补偿算法比较复杂,同时易受场景地物信息的影响,具有一定的不稳定性。在本实时成像系统中,我们首先利用无人机提供的惯导数据对运动误差进行了初补偿,消除了大部分的运动误差;在后续的处理中,又利用回波数据进行运动误差估计与补偿,进一步消除了运动误差。这种惯导计算运动误差与回波数据估计运动误差相结合的算法,充分发挥了两种方法的优点,增加了系统的可靠性。
SAR实时处理要求能够实时地输出大面积连续图像,因而要求在不降低成像质量的前提下,尽量使算法简单、运算量小、稳健性高。基于以上分析,我们采用了一种改进型的RD算法,该算法可以充分利用收集回波脉冲期间的时间,通过初次距离脉压截取大大减少了运算量。同时该算法能较好地进行距离弯曲校正,并实现高分辨率的SAR成像处理,且整个算法结构非常适合实时处理流程[7]。图2给出了结合惯导和回波数据进行运动补偿的改进型的RD成像算法的详细流程图。
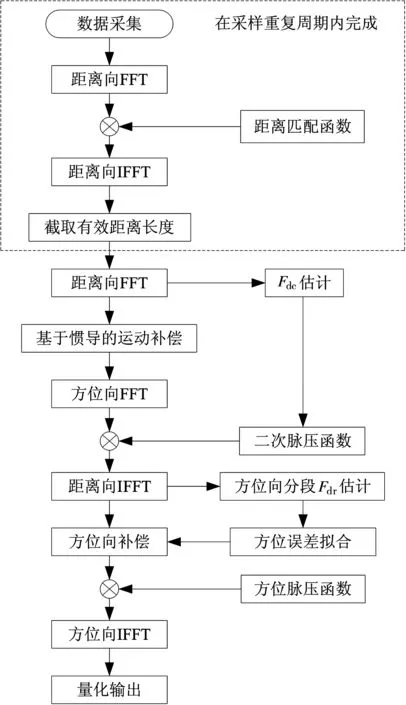
图2 实时成像算法流程图
3 实时处理成像结果
采用上述的处理机体系结构和成像算法,在陕西某地进行了实际飞行试验,其成像结果如图3和图4所示。在无人机平台上成功稳定的实现大面积连续实时成像。雷达参数如下:
4 结束语
本文介绍了一种基于TS201芯片,适合于无人机载SAR实时信号处理系统的硬件结构,并在该实时信号处理系统上采用改进型RD算法实现实时成像功能。通过在无人机平台上的飞行试验,获取了大面积连续实时SAR图像,验证了该信号处理系统的可行性。

图3 陕西某地区3 m×3 m分辨率成像结果(距离向大于10 km,方位向连续多帧拼接)

图4 陕西某地区1 m×1 m分辨率成像结果(距离向大于2 km,方位向连续多帧拼接)
[1]冯密荣.世界无人机大全[M].北京:航空工业出版社,2004:22-31.
[2]方志红,张长耀,邓海涛,等.直升机载SAR实时处理的实现[C]∥2003年中国合成孔径雷达会议论文集,合肥:中国电子学会无线电定位技术分会,2003:256-259.
[3]唐月生,邓海涛,张长耀,等.机载SAR实时成像处理系统设计[J].遥感技术与应用,2007,20(1):81-84.
[4]Analog Device Inc.ADSP-TS201 TigerSHARC Processor Hardware Reference[M].Norwood,Mass:Analog Devices Inc,2004:11.
[5]韩锐.一种基于GPS/IMU组合导航的机载SAR运动补偿方案[J].中国惯性技术学报 ,2013,21(3):308-311.
[6]汤光超,常文革,贾高伟.基于GPS多普勒频移的SAR运动补偿研究[J].雷达科学与技术,2013,11(5):475-479.
[7]竺红伟,梁之勇.一种通用无人机载SAR实时信号处理系统设计[J].航天电子对抗 ,2013,19(3):29-31.
