UPF改进算法在单站无源定位中的应用∗
2014-03-21申正义王晴晴
申正义,王晴晴,许 诚,张 勇
(1.空军预警学院预警模拟训练中心,湖北武汉430019;2.空军预警学院图书馆,湖北武汉430019)
0 引言
单站无源定位技术近年来已成为各军事强国的一个研究热点。仅利用单个固定观测站接收运动目标自身辐射的信号来估计其位置和运动状态的过程称为固定单站无源定位与跟踪。固定单站无源定位系统本身并不向外辐射电磁波,只需一个信号接收站,具有设备简单、受环境影响小、隐蔽性强和作用距离远等优点[1-3]。
利用空频域信息实现固定单站无源定位,是一种快速高精度的定位方法。但参数测量都带有误差,因此除了要有高精度的参数测量技术外,还需要研究高性能的跟踪滤波算法,以便最大限度地利用观测量提供的目标运动信息,同时也可减轻对参数测量技术的压力。固定单站无源定位目标跟踪是典型的非线性滤波过程,常见的算法主要是扩展卡尔曼滤波(Extended Kalman Filter,EKF)和无迹卡尔曼滤波(Unscented Kalman Filter,UKF)。EKF和UKF算法均存在滤波性能受初始误差影响较大、系统非线性非高斯特性较强时滤波性能会急剧下降的问题。然而,固定单站无源定位跟踪是一个典型的非线性状态估计问题,且在实际应用中根本不存在标准的高斯白噪声,粒子滤波(Particle Filter,PF)的出现为解决这一问题提供了有效方法。2000年以来,粒子滤波得到了快速发展,许多改进算法相继被提出。从改进重要密度函数选取的角度出发,文献[4]和文献[5]分别提出了扩展卡尔曼粒子滤波算法(Extended Kalman Particle Filter,EKPF)和无迹粒子滤波(Unscented Particle Filter,UPF)算法。EKPF和UPF算法的本质均是在重要性采样阶段用EKF或UKF算法对每个粒子进行更新,这无疑加大了算法的运算量,使算法的实时性变差。为此本文提出一种改进的UPF算法,对传统的UPF算法在采用超球面单形采样策略、用卡尔曼滤波代替状态模型的Sigma点采样、对部分粒子间隔进行UKF采样三个方面进行了改进,在保证算法滤波性能的前提下有效降低运算量。
1 固定单站无源定位跟踪系统模型
1.1 系统状态模型
对于单个固定观测站对空中运动目标辐射源进行定位的情形,其定位模型可采用以观测站为原点建立的直角坐标系来描述,如图1所示,T(x,y)为目标辐射源相对位置,v为目标辐射源运动速度矢量,̇x,̇y为目标运动速度矢量v在x,y轴上的分量,r为斜距,β为辐射源信号方向角[6]。
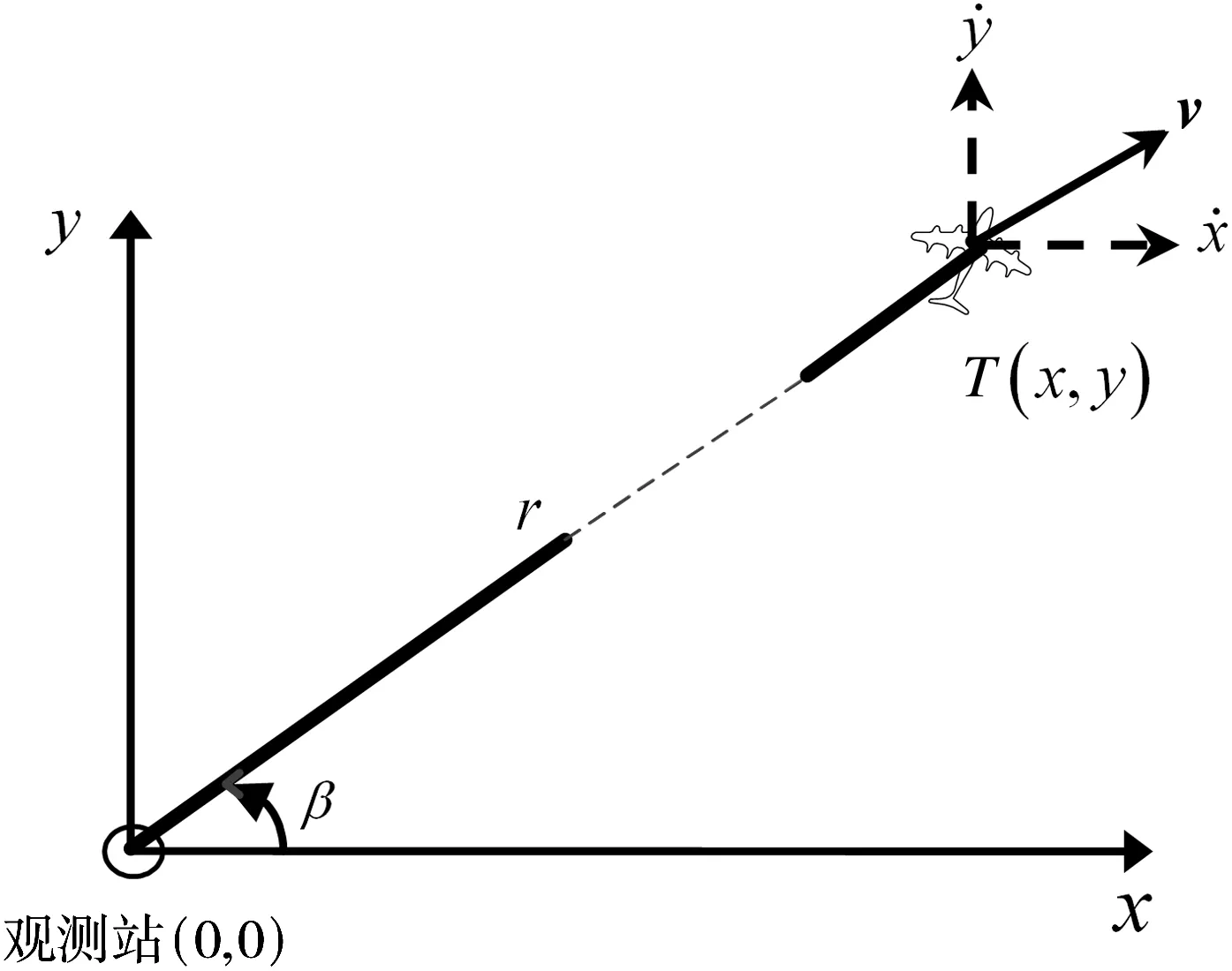
图1 二维平面固定单站无源定位模型
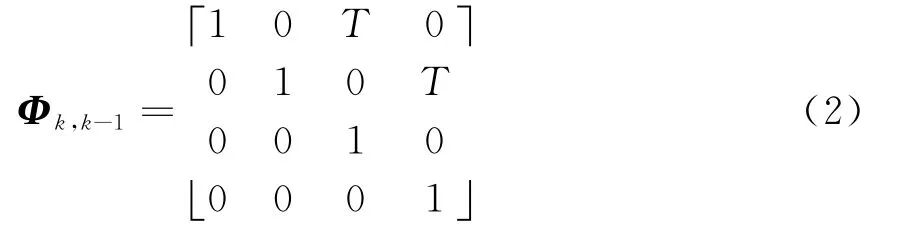
目标辐射源多处于巡航状态,特别是相距观测站较远时,其运动状态可视为匀速直线运动,外加一个扰动 。 给定状态向量,其中x,y为目标位置,为目标速度,则在二维平面直角坐标系下目标状态向量随时间演化的状态模型可写为

式中,W k为系统的扰动噪声,Φk,k-1为状态转移矩阵:
1.2 系统观测模型
本文拟采用基于角度β、角度变化率、多普勒频率变化率等信息为观测量进行固定单站无源目标定位的方法[7]。根据定位原理,目标状态向量与观测量之间的关系如下:

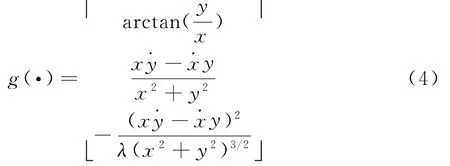
式中,λ为辐射源信号的波长。
上述状态模型为线性的,而观测模型为非线性的,因此需采用非线性滤波算法对目标状态进行递推估计,以实现固定单观测站对运动目标的无源定位与跟踪。
2 粒子滤波算法
2.1 标准粒子滤波算法
粒子滤波是以非参数化的蒙特卡罗近似为特色的一种算法,其核心思想是用大量离散的随机采样点(粒子)及其相应权值来近似系统变量的后验概率密度函数,以样本均值代替积分运算,从而获得状态变量的最小方差估计,这些粒子根据贝叶斯准则进行适当的加权和递归传播。实际上直接从后验分布采样是很困难的,通常引入一个容易获取样本的重要密度函数,标准PF算法选择先验概率密度作为重要密度函数,没有充分考虑当前时刻的观测值,存在粒子退化现象[8]。
2.2 基于重要密度函数选择的改进粒子滤波算法
EKPF和UPF算法从改进重要密度函数的选择入手,分别利用EKF和UKF运算对每个粒子进行更新,将最后得到的近似后验密度作为重要密度函数,引入了当前时刻的最新观测值,在一定程度上提高了算法的估计精度[4-5]。对于具有高斯特性的状态噪声和观测噪声的弱非线性系统,EKPF能够较好地克服经典粒子滤波存在的问题,但在很多情况下,动态系统具有强非线性,一阶线性化近似之后会导致很大的模型误差,从而使EKF的估计性能迅速下降甚至造成滤波发散。UPF算法采用UKF运算得到更优的重要密度函数,由于UKF采用UT变换,对均值和协方差的计算可以精确到真实后验分布的二阶矩,使得粒子的分布更加接近状态的后验概率分布,滤波精度优于UKF和EKPF算法。
UPF算法的具体实现步骤如下:
(1)初始化采样

(2)计算滤波估计值和方差
(3)重要性采样
(4)重要性权值计算
根据式(5)计算粒子的重要性权值,并进行归一化。

(5)重采样
计算Neff,若Neff<Nth,则进行重采样,得到

(6)状态估计

3 改进的UPF算法
3.1 改进思路
与EKPF算法类似,UPF算法的本质仍是在重要性采样阶段用UKF算法对每个粒子进行更新,这种方法引入了当前时刻新的观测值,从而可以得到较高的估计精度,但由于UKF的计算量很大程度上取决于无迹变换(UT)中的采样点个数,因此对于高维系统,UPF的计算量会随着采样点的增加而变得庞大,使算法的实时性相对于UKF和EKPF算法更差。为此,本文通过对UPF算法作如下改进,提出一种改进的UPF算法:
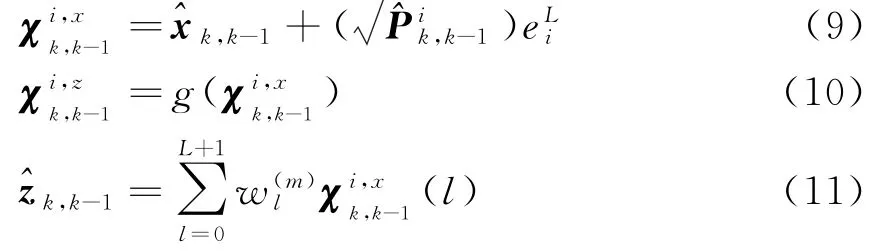
(1)在UPF算法第(2)步,借鉴简化UKF算法的思想,采用超球面单形采样策略[9],相对于采用对称采样的标准UKF算法有效减少了需要采样的Sigma点数。
(2)在UPF算法第(2)步,针对式(1)所示的固定单站无源定位目标跟踪系统状态模型的线性特性,直接用卡尔曼滤波代替状态方程的UT变换和加权拟合,对状态以及状态估计的误差协方差阵进行一步预测,进一步简化UPF中的UKF运算[10]。
(3)在UPF算法第(2)步只间隔计算N/4的粒子的滤波估计值和方差,在第(3)步进行重要性采样时,只从重要密度函数中采样产生N/4的粒子,其余3N/4的粒子仍采用标准粒子算法的先验概率分布作为重要密度函数进行采样更新,既增加了粒子的多样性,又降低了算法的运算量。
经过上述改进后,UPF算法中UKF采样的Sigma点数量为9(2L+1,L为状态模型的维数),改进算法中运用的简化UKF方法的Sigma点数量为6(L+2),且直接用KF代替状态方程的Sigma点采样;另一方面,改进算法相对于标准粒子滤波算法只有N/4的粒子采用了UKF进行重要性采样更新,因此对于高阶系统,改进算法的计算量相对于UPF大大减小,实时性得到有效提高。此外,改进算法既考虑了当前时刻的观测值、先验概率对后验概率分布的影响,又增加了粒子的多样性,使粒子集更加逼近真实的后验概率密度函数,从而使滤波精度能够得到保持。
3.2 算法运算步骤
基于超球面单形采样的改进UPF算法的运算步骤如下:
第一步 初始化粒子及其权值

(1)对于k=1,2,…,+∞,计算预测值和预测协方差阵:

(3)根据预测的状态变量和观测矢量的样本点计算Kalman增益矩阵:

(4)根据k时刻的观测值对状态变量及其协方差阵滤波更新:

第三步 重要性采样
第四步 重要性权值计算
按式(5)计算粒子的重要性权值,并归一化。
第五步 重采样
按式(6)计算Neff,若Neff<Nth,则进行重采样,得到新的粒子集
第六步 状态估计
按照式(7)计算状态估计值。
4 算法性能仿真验证
4.1 仿真条件
假定观测站位置为(0,0),目标的初始位置为(50 km,220 km),以(300 m/s,50 m/s)的速度作匀速直线运动,目标辐射源信号波长λ=30 mm,观测间隔T=1 s,观测时间为120 s。为比较上述几种滤波算法的定位跟踪效果,采用相对位置误差(RPE)来评价算法的滤波性能。

式中,(xtrue,ytrue)为目标位置真实值为目标位置的估计值。
本文将传统的EKPF、UPF算法以及本文提出的改进UPF算法应用于固定单站无源定位目标跟踪系统中,在初始值为真值或测量值时,选择观测量的测量误差为(2,0.4,1)和(5,0.8,2),测量误差单位为(mrad,mrad/s,Hz/s),分别进行100次蒙特卡罗实验,考察3种算法的滤波性能和滤波耗时。在3种算法的仿真中,均取粒子数N=200,重采样门限Nth=66。
4.2 仿真结果分析
分别在四种不同条件下对3种算法的滤波性能进行100次蒙特卡罗实验,得到3种算法的收敛次数和单次滤波耗时如表1所示,仿真中RPE<5%时认为算法收敛1次。

表1 100次实验中各算法收敛次数及滤波耗时对比
为了提供更直观的滤波性能比较,图2和图3分别给出了3种算法在4种条件下RPE<5%的统计平均曲线。
从以上仿真结果中可以看出,3种算法在固定单站无源定位跟踪系统中均具有良好的适应性。在相同条件下,UPF及其改进算法的滤波性能明显优于EKPF算法,这是因为EKPF算法采用EKF运算进行重要密度采样,存在线性化近似引起的模型误差,而UPF算法采用基于UT变换的UKF运算进行重要密度采样,可以更有效地应对系统模型的非线性和噪声为非高斯分布等因素。从仿真结果还可以看出,初始值为真值时,在滤波初始阶段改进算法的滤波精度略逊于UPF,但随着滤波时间的积累,两者的滤波曲线基本重合;初始值为测量值时,改进算法与UPF算法的滤波性能基本相当,说明改进算法基本保持了原算法的滤波精度。

图2 初始值为真值时3种算法的性能比较
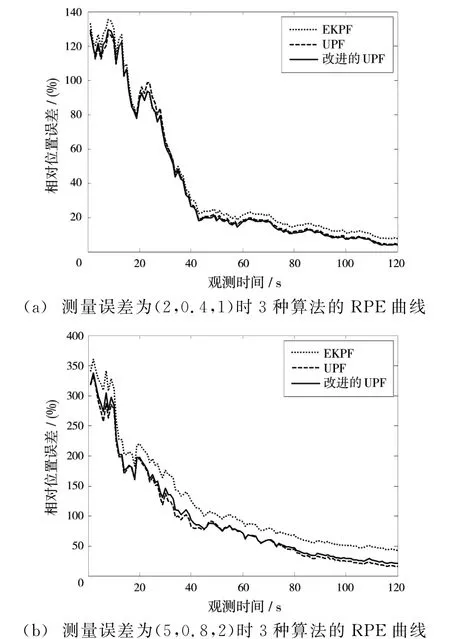
图3 初始值为测量值时3种算法的RPE曲线
在滤波耗时方面,由于UKF算法的运算量本身大于EKF,因此UPF算法的运算时间相对于EKPF算法也明显增大,使算法的实时性变差。本文提出的改进UPF算法在重要密度函数采样阶段进行UKF运算时,针对固定单站无源定位跟踪系统状态模型的线性特性直接用KF代替状态模型的Sigma采样,并采用超球面单形采样策略,使Sigma点数量少于传统的UKF,且只有N/4的粒子进行了UKF采样更新,既增加了粒子的多样性,使粒子分布更加合理,抑制了粒子退化现象,又有效降低了算法的运算量。因此改进算法的运算效率优于UPF,平均运算时间少于UPF。
需要注意的是,从仿真结果看,改进的UPF算法尽管运算量大幅下降,但其滤波耗时仍较高,这是由于Matlab仿真时N个粒子的运算是顺序执行的。实际工程应用中,硬件上实现粒子滤波运算时N个粒子的处理是并行的,且随着高速计算机的出现,运算速度大幅提高,因此改进的UPF算法可满足系统的实时性要求,适合固定单站无源定位跟踪系统。
5 结束语
本文在介绍以角度、角度变化率、多普勒频率变化率为观测量的固定单站无源定位与跟踪原理的基础上,引入EKPF和UPF算法对定位结果进行滤波处理,并针对UPF算法运算量大、实时性差的问题,对其进行了3个方面的改进,提出了改进的UPF算法。理论分析和仿真结果表明,基于重要密度采样改进的粒子滤波算法对固定单站无源定位跟踪系统具有较好的滤波估计能力,但由于UPF算法需对每个粒子进行UKF滤波预测更新,运算量大幅增加。改进的UPF算法通过用KF代替状态模型的Sigma采样、采用超球面单形采样策略、只对N/4的粒子进行UKF采样更新三个方面的改进,可用相当于EKPF的运算效率得到UPF的滤波精度,有效提高了算法的实时性,具有较好的实用和推广价值。
[1]何明浩.雷达对抗信息处理[M].北京:清华大学出版社,2010.
[2]万方,丁建江,陈昌孝.固定单站无源定位与跟踪方法应用[J].火力与指挥控制,2011,36(7):61-64.
[3]刘学,焦淑红.自适应迭代平方根UKF的单站无源定位算法[J].哈尔滨工程大学学报,2011,32(3):372-377.
[4]FREITAS J F G,NIRANJAN M,GEE A H.Sequential Monte Carlo Methods to Train Neural Network Models[J].Neural Computation,2000,12(4):955-993.
[5]QI C,BONDON P.A New Unscented Particle Filter[C]∥IEEE International Conference on Acoustics,Speech and Signal Processing,Las Vegas,NV:IEEE,2008:3417-3420.
[6]徐璟,何明浩,郁春来,等.固定单站被动目标跟踪算法性能分析[J].电子信息对抗技术,2011,26(1):29-33.
[7]郁春来.利用空频域信息的单站无源定位与跟踪关键技术研究[D].长沙:国防科学技术大学电子科学与工程学院,2008.
[8]李孟敏.改进粒子滤波算法及其在目标跟踪中应用研究[D].合肥:合肥工业大学,2011.
[9]JULIER S J.The Spherical Simplex Unscented Transformation[C]∥Proceedings of the 2003 American Control Conference,[S.l.]:IEEE,2003:2430-2434.
[10]王昌海,曲长文,徐征.基于改进SRUKF的多机无源定位跟踪算法[J].雷达科学与技术,2012,10(5):492-496.WANG Chang-hai,QU Chang-wen,XU Zheng.Multi-Plane Passive Locating and Tracking Algorithm Based on Improved SRUKF[J].Radar Science and Technology,2012,10(5):492-496.(in Chinese)
