汽车防碰撞预警/碰撞算法研究现状及分析
2014-03-20于广鹏谭德荣马福霞
于广鹏, 谭德荣, 马福霞
(山东理工大学交通与车辆工程学院, 山东淄博 255091)
汽车防碰撞预警/碰撞(CW/CA)算法是汽车防碰撞系统的核心,该算法的准确与否直接影响到车辆的行驶安全,对预防汽车碰撞,减少交通事故有着重要的意义[1].
预警/碰撞算法的作用是确定系统的启动逻辑和启动时机,一个好的避撞算法对整个系统的性能有着重要的影响,因此,其准确性、实时性一直是研究的重点.现有的预警/碰撞算法主要分为安全时间逻辑算法和安全距离逻辑算法两类[2].安全时间逻辑算法主要以TTC(Time to collision)为研究对象,日本东京农工大学首创了这一研究方法,即TTC模型[2-3].后来一些学者根据这一研究方法相继作出了一系列的研究,例如,清华大学的王建强博士提出了基于碰撞时间TTC的适应驾驶员特性的报警避撞算法;北京理工大学的裴晓飞以碰撞时间倒数(TTC-1)为研究思路,提出了基于危险系数ε的分级报警与主动制动的安全距离模型[4].安全距离逻辑算法主要以车间实距为研究对象,按研究思路不同又可以分为固定车距模型、运动学模型和驾驶员模型等.固定车距模型以固定的车间实距为判断阈值,比较经典的有Mazda模型、Honda模型、Berkeley模型和NHTSA模型以及伯克利大学在MZADA模型和HONDA模型基础上改进的安全车距模型等[4-5];运动学模型是利用GPS、DSRC(短程通讯)等技术实时获取自车和周围车辆的相关信息,然后通过对驾驶员的研究,使预警系统对车辆的控制与驾驶员的操作基本一致[6-8],例如清华大学的高锋在对汽车油门、制动执行器重新改进的基础上,设计的基于CAN总线的安全车距保持系统[9];驾驶员模型是通过实验获取驾驶员特征数据并利用数学方法对表征驾驶员特征的因素进行综合评判,然后建立符合驾驶员驾驶特征的车距模型,例如,清华大学的张磊在实车实验基础上提出的符合驾驶员跟车习惯的报警避撞算法[10];清华大学的边明远利用综合加权评判方法法提出的考虑驾驶员个体特性的汽车安全车距模型[11].
1 基于驾驶特征的预警算法研究
1.1经典安全车距模型分析
Mazda模型、Honda模型以及Berkeley模型是比较经典的安全车距模型,后续的很多模型都是在其基础上进行改进的.本文通过对比不同相对车速下,三种模型所确定的安全制动距离来分析各自的优缺点.表1为三种经典算法的模型公式.

表1 各类算法对应的模型公式
图1为Mazda模型、Honda模型以及Berkeley模型的制动距离对比图,通过图1可看出:Mazda模型确定的制动时机比较晚,相对比较保守,原因是该模型将所有能考虑的碰撞情况都考虑了进去,甚至包括一些出现概率很小的极端危险情况,因此在汽车实际行驶中,系统会频繁报警,这样便会干扰驾驶员的正常驾驶,使得驾驶员对该系统的信任度降低,甚至有可能会主动关掉预警系统[12-13];Honda模型确定的主动制动距离比较短,制动时机比较晚,在汽车实际行驶中,车辆有可能出现碰撞危险;相对而言,Berkeley模型制动时机比较适中,算法实时性、准确性相对比较好.
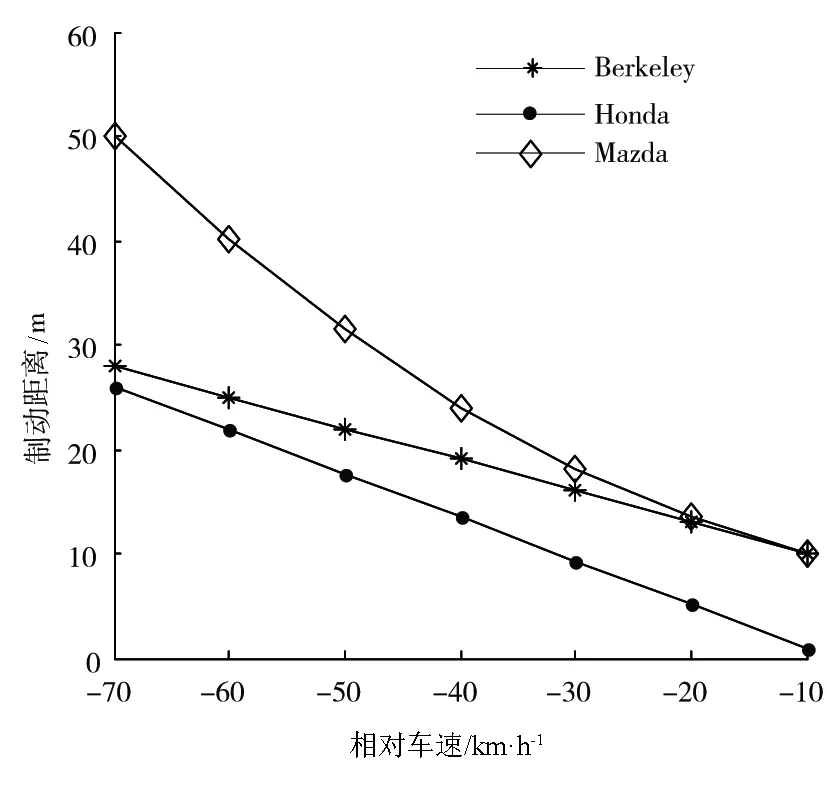
图1 三种经典算法的制动距离对比
1.2 考虑驾驶模式的预警算法分析
当前很多学者在建立安全预警算法时,按照驾驶员驾驶风格的不同建立了三种驾驶模式,即外倾型、中倾型和内倾型驾驶模式[14].这种算法实质上就是对预警算法中的驾驶员反应时间按照驾驶风格的不同进行了相应的取值,表2为三种不同驾驶风格的驾驶员所对应的平均反应时间.

表2 不同驾驶风格驾驶员平均反应时间
由上述分析可知,驾驶员不同的驾驶风格可以通过反应时间来表示,因此本文通过改变Berkeley预警算法中的驾驶员反应时间对上述驾驶风格进行仿真分析,结果如图2所示.由图2可以看出,考虑驾驶员驾驶风格的预警算法在一定程度上能够适应不同驾驶员的驾驶需求,并且在车辆行驶过程中,驾驶员可以根据自身的身体状况以及驾驶环境进行不同驾驶模式的变换,因此这种预警算法能够较好地体现驾驶员的驾驶特征[15].但这种算法在对驾驶员反应时间的处理上只是粗略的进行了分类,要使算法能够满足驾驶员的个体需求,须综合考虑驾驶员的驾驶特征.

图2 三种驾驶风格所对应的预警距离
1.3 基于驾驶特征的预警算法分析
本文将利用Berkeley模型分析在综合考虑驾驶员驾驶特征时的预警距离的优越性,利用综合加权平均法[16-17]分别对两名驾驶员的驾驶经验X1(权重ω1)、年龄X2(权重ω2)、身体状况X3(权重ω3)、精神状况X4(权重ω4)以及视野状况X5(ω5)进行综合评判打分,然后利用公式
(1)
(2)
对反应时间进行修正.两名驾驶员的5项指标的评估分值以及综合评估分值如表3所示.

表3 两名驾驶员评估指标表
图3为考虑了驾驶员驾驶特征的车距模型的仿真结果.由图3可以看出,不同的驾驶员在不同的驾驶状态(驾驶环境以及身体状态)下,利用综合加权平均法所确定的预警距离是不同的,相对于上述的按照驾驶风格划分的预警算法而言,该方法是以单个驾驶员为研究对象,对其反应时间进行的修正,因此该方法更加适合驾驶员的个体需求.
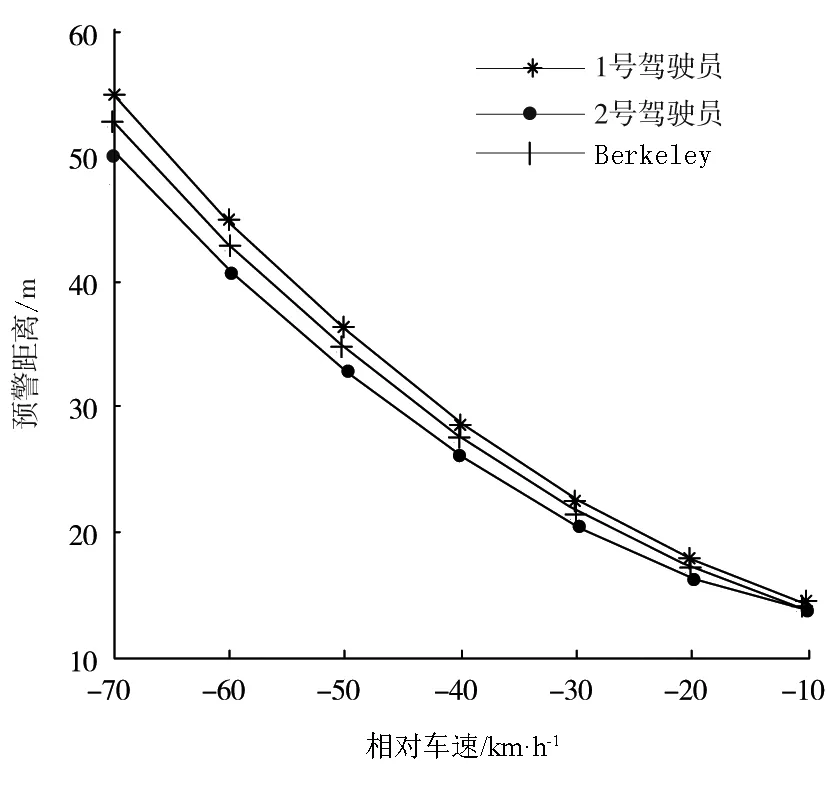
图3 Berkeley算法修正前后对比
2 驾驶员驾驶特征相关因素分析
通过上述分析可以看出,综合考虑驾驶员驾驶特征时确定的安全车距要比其他模型更适合驾驶员的个体需求.下面将具体分析影响驾驶员驾驶特征的相关因素.当前人们一般用驾驶员的驾驶倾向来刻画驾驶员的驾驶特征.山东理工大学的王晓原[14]教授对驾驶员驾驶倾向进行的大量理论和实验研究表明,影响驾驶员驾驶倾向的因素主要有:(1)驾驶员自身的因素,包括生理特征(性别、年龄、身体健康等)、心理特征(能力、性格、情绪等)以及其他的例如驾驶员的职业,道德、文化程度、家庭背景等因素;(2)环境因素,包括天气、交通流密度、道路状况、交通干扰等;(3)车辆因素,包括车辆的属性、车辆的性能、车辆的设施等.另外,不同驾驶倾向的驾驶员其表现的驾驶行为是不一样的,具体表现为驾驶操纵力度(油门踏板力度、刹车踏板制动力、方向盘握力),驾驶员操纵频率(加油频率、换道频率、制动频率)以及反映判断指标(反应时间、速度估计、复杂反映判断)的不同,其中驾驶员驾驶倾向与驾驶员反应时间关系如表4所示.可以看出,外倾型驾驶员其反应时间比较短,反映比较迅速,中倾型驾驶员次之,内倾型驾驶员反映时间比较长,反映比较迟钝.
即使判断出驾驶员的驾驶倾向,也只能代表驾驶员在某一时刻的驾驶特征,因为车辆行驶过程中所有的影响因素都是一个动态的过程,随着驾驶时间的变化,驾驶员驾驶环境以及自身的生理心理状况等都时刻在变化.经过统计分析发现,连续驾驶 3h后,大脑就会出现疲劳状况,事故率开始增加,连续驾驶 4h后事故率是连续驾驶3h的1.5倍[18];天气也会影响驾驶员的反应能力,灾害性天气下,由于外界的能见度变小,驾驶员的感知阈值相应的会提高,只有车辆之间相互关系发生很大的变化时,驾驶员才能做出相应的反应,也就是说在灾害性天气中驾驶员需要花费更多的时间对前车运动状况进行判断,因此反应时间会相应的变长,也容易产生驾驶疲劳[19-20].另外,驾驶员自身的生理心理的变化,交通流密度的变化以及性别和年龄都会对驾驶员的反应能力有一定的影响.

表4 驾驶倾向与反应时间之间的关系 s
通过上述分析可知,理想的安全车距确定过程应该如图4所示,首先利用离线测试方法对驾驶员在一般情况下的驾驶倾向进行一个初始判断,给出驾驶员的一般反应时间,然后在车辆行驶过程中,实时采集影响驾驶员反映状态的各个指标,对驾驶员的反映状态进行实时判断,进而对反应时间进行修正,最终得出一个比较理想的安全车距.
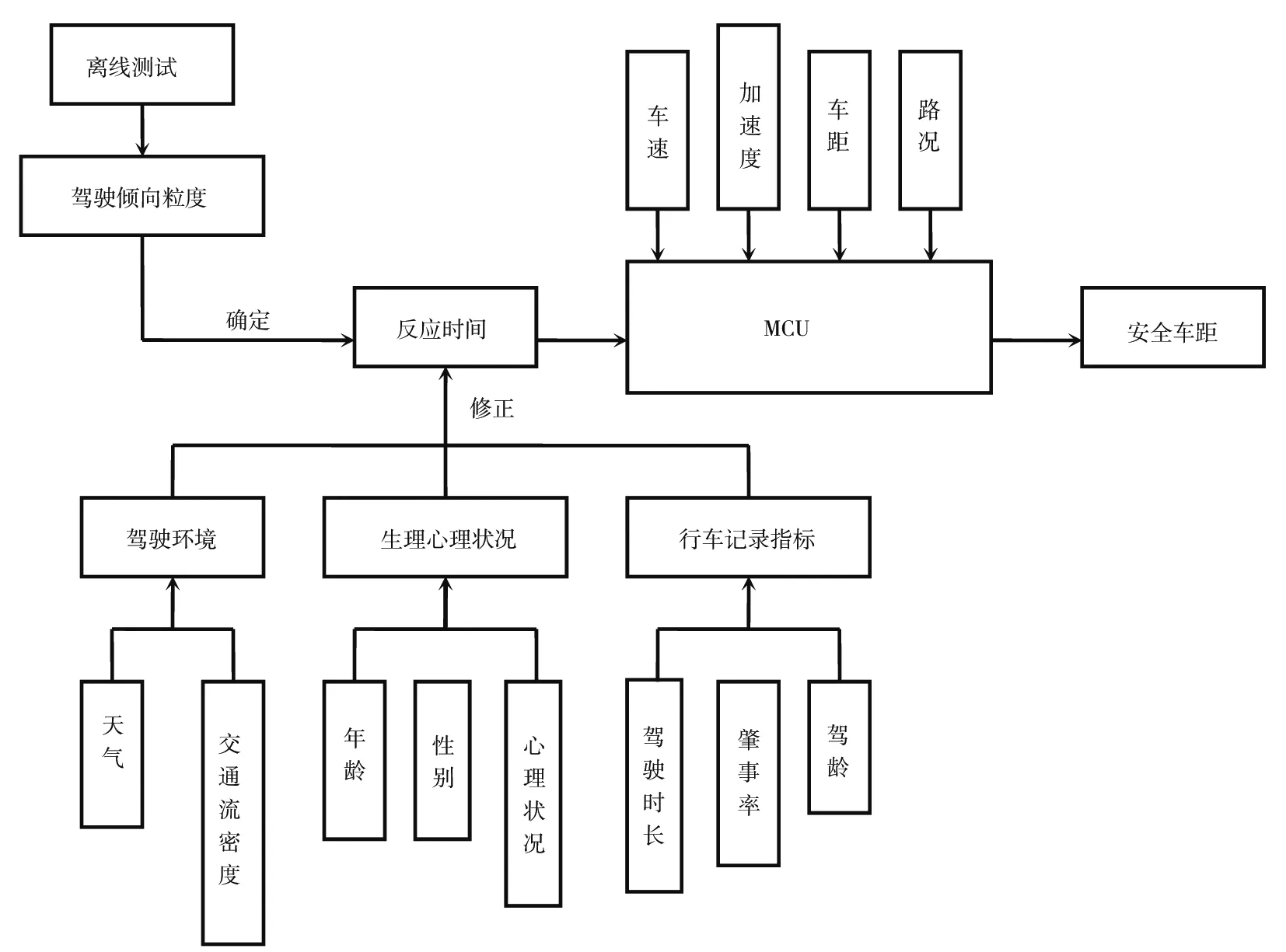
图4 理想安全车距的确定过程
3 算法存在的问题
通过以上分析,当前预警/制动算法主要存在以下几个问题:
(1)算法存在一定的误警率和虚警率.系统的报警必须最小限度地减少对驾驶员注意力的干扰,报警频率过高会使驾驶员失去对报警信号的信任,当车辆真的存在碰撞危险时,驾驶员容易忽略报警信号.
(2)算法的主动控制时机不准确.系统的主动控制不能影响驾驶员的正常操作,当紧急情况下车辆进行主动制动时应该先判断驾驶员的操作,当驾驶员正在进行避撞操作时,系统如果主动制动,驾驶员就有可能被车辆的突然制动干扰,失去对车辆的控制.
(3)算法没有充分考虑驾驶员的驾驶特征.通过上文分析可知,不同的驾驶员拥有不同的驾驶风格,如果一个报警算法过于保守,那么对于外倾型驾驶员就会造成干扰,容易使其忽略系统的报警,甚至关掉报警系统;相反,如果一个算法过于激进,内倾型驾驶员就会感到不适应.
(4)表征驾驶员驾驶特征的相关信息难以实时获取.首先不同的驾驶员由于个体需求不同,其驾驶特征也不同,即使同一驾驶员,在不同驾驶时间段和驾驶环境下,其个体需求也不相同.因此,要想充分地考虑驾驶员的驾驶特征,安全预警算法必须实时采集驾驶员的相关状态信息.
汽车预警/制动算法的理论研究已经取得了很大的成就,现阶段应该将驾驶员作为研究的核心,研究目的定位在充分体现驾驶员个体驾驶特征上,研究方向可分为驾驶员驾驶特征的研究和影响驾驶员驾驶特征的相关信息的实时采集,最终利用硬件作为技术支持实时采集驾驶员的状态信息,建立满足驾驶员个体驾驶需求的预警算法.
[1] 宋晓琳,冯广刚,杨济匡.汽车主动避撞系统的发展现状及趋势[J].汽车工程, 2009, 30(4): 285-290.
[2] 王建强,迟瑞娟,张磊,等.适应驾驶员特性的汽车追尾报警-避撞算法研究[J].公路交通科技, 2009, 26(1):7-12.
[3] Yoshida H, Awano S, Nagai M,etal. Target following brake control for collision avoidance assist of active interface vehicle[C]//SICE-ICASE.2006 International Joint Conference. IEEE, 2006: 4436-4439.
[4] 裴晓飞,刘昭度,马国成,等.汽车主动避撞系统的安全距离模型和目标检测算法[J].汽车安全与节能学报, 2012, 3(1): 26-33.
[5]刘刚,侯德藻,李克强,等.汽车主动避撞系统安全预警算法[J].清华大学学报:自然科学版,2004,44(5):697-700.
[6] Doi A, Bustuent T, Niibe T,etal.Development of a rea end collision avoidance system with automatic braking control [J].JSAE Review, 1994, 15 (4): 335-340.
[7] Miller R, Huang Q. An adaptive peer-to-peer collision warning system[C]//Vehicular Technology Conference. IEEE, 2002: 317-321.
[8] 李克强,王跃建,高锋,等.基于 ITS技术的汽车驾驶安全辅助系统[J].汽车技术, 2006 (z1): 32-35.
[9] 高锋,张磊,王建强,等.基于 CAN总线的安全车距保持系统[J].汽车工程, 2007, 28(12): 1 090-1 093.
[10] 张磊,王建强,李克强,等.基于驾驶员跟车习惯的报警/避撞算法研究[J].汽车工程, 2006, 28(4): 351-355.
[11] 边明远.考虑驾驶员个体特性的汽车安全行驶间距模型[J].中国机械工程, 2010, 21(12):1 502-1 506.
[12] Jansson J, Johansson J, Gustafsson F. Decision making for collision avoidance systems[J]. Society of Automotive Engineering SAE, 2002,4(3):231-236.
[13] 张广祥.基于驾驶行为的汽车主动防撞预警系统的安全车距研究 [D].长春:吉林大学, 2011.
[14] 王晓原,张敬磊,Ban X G.基于动态人车环境协同推演的汽车驾驶倾向性辨识[M]. 北京:科学出版社, 2013:129-131.
[15] Nakaoka M, Raksincharoensak P, Nagai M. Study on forward collision warning system adapted to driver characteristics and road environment[C]//Control, Automation and Systems, 2008. ICCAS 2008. International Conference on. IEEE, 2008: 2 890-2 895.
[16] Van Winsum W. The human element in car following models[J]. Transportation research part F: traffic psychology and behaviour, 1999, 2(4): 207-211.
[17] Naja R. A survey of communications for intelligent transportation systems[M]. New York:Springer 2013: 3-35.
[18] 郭孜政,陈崇双,成泽亮,等.合理连续驾驶时长量化确定方法研究[J].北京工业大学学报, 2011, 37(6): 863-868.
[19] 徐济宣,吴纪生.恶劣环境对驾驶员反应时间的影响研究[J].交通标准化, 2009 (23): 103-106.
[20] 张宝贵,崔粉蛾,葛红萍.冰冻雨雪天气与交通安全[C]//中国科学技术协会.沈阳:第六届雨雪冰冻 (霜冻)灾害论坛论文集,2012:256-262.