飞机结构件加工域单元分层识别及构造方法
2014-03-17李春晖郑国磊陈树林
李春晖, 郑国磊, 陈树林
(1. 北京航空航天大学机械工程及自动化学院,北京 100191;2. 沈阳飞机工业(集团)有限公司,辽宁 沈阳 110034)
飞机结构件加工域单元分层识别及构造方法
李春晖1, 郑国磊1, 陈树林2
(1. 北京航空航天大学机械工程及自动化学院,北京 100191;2. 沈阳飞机工业(集团)有限公司,辽宁 沈阳 110034)
加工域的自动识别是自动数控加工编程的关键技术之一。为实现飞机结构件自动数控加工程序编制过程中工序件加工域的自动识别,建立了加工域模型,提出了一种实用、可行的域元分层识别方法。首先,根据工序件构建分层面,截切零件和毛坯;其次,依据层交结果构建层域元轮廓,生成层域元;然后,建立规则合并层域元生成域元;最后,通过匹配域元间纵向关系,构建域元树状模型。通过对飞机结构件的测试,证明了该方法的有效性和实用性。
计算机应用;飞机结构件;特征识别;数控加工;自动编程;加工域
飞机结构件的加工是飞机制造的重要组成部分。现代飞机结构中越来越多地采用整体结构件来代替原先的装配式组合件[1],整体结构件尺寸大、结构复杂、切削精度要求高,使其一般采取数控加工方式。目前,国内航空企业普遍采用基于三维模型的交互式编程技术对飞机结构件进行数控编程。但该技术存在交互量大、数控程序编制质量不稳定以及专业化程度低等缺点。因此,相关学者将研究的重点放在自动数控加工编程技术上。该技术可以实现由零件和毛坯自动生成数控加工程序,要求系统自动识别加工域。因此,对表示加工域的特征进行自动识别是实现数控加工程序自动编制的基础与关键。
目前的特征识别方法主要有句法模式[2]、基于图[3]、神经网络[4]、体积分解[5],基于CSG树、分层求交等方法。上述方法虽然在一定程度上实现了零件特征的自动识别,但对相交特征以及复杂零件,特别是含有复杂曲面的零件还难以稳定、完整地识别出结果。
近年来,国内一些航空院校专门针对飞机结构件的自动数控加工编程技术展开了相关研究。如谭丰和胡俊志[6-7]分别对飞机结构件槽腔特征与筋特征的自动数控编程技术进行了研究,提出基于图和工艺知识相融合的特征识别方法。该方法对绝大多数特征适用,但对于一些特殊的相交特征,识别结果不尽如人意。于芳芳[8]提出了基于广义槽分层的加工特征自动识别方法。该方法目前可实现对飞机整体壁板类零件大部分特征的识别,但其仅限于对板材为毛坯的零件进行特征识别,无法对锻铸件毛坯进行处理,且未考虑工序件的识别。
为特征识别结果能够直接应用于后续基于残留域的加工单元构造[9],并且增加对工序件情况的识别处理,本文在基于广义槽分层的加工特征识别方法基础上,提出加工域单元的概念,并对其识别构造算法进行研究。
1 加工域模型
1.1 域元
首先对加工域单元相关概念进行说明:
工序件:零件的多工位、多工序加工过程中生成的中间工件称为中间件。中间件与零件和毛坯一同称为工序件,用δ表示。
工位、前件和后件:工位为工序件在加工台上相对于机床的装夹方位,用ω(δi, δi+1)表示,其中,δi和δi+1分别为当前工位ω的前工序件和后工序件,分别简称前件、后件,用 V、T表示,如图1(a)、(b)所示。
加工域:加工域是指前件减去后件的多余材料域,如图1(c)。
域元:为满足后续自动数控编程的需要,对加工域按照实际的数控加工过程进行拆分,得到的相互独立的基本单元就称为加工域单元,简称域元,表示为u,如图1(d)所示。

图1 加工域及域元示例图
从拓扑构成角度分析,域元可用一组界定一个相对独立加工域的面表示。此外还应包括与其他域元间的关联信息。本文将域元u表示为:

其中,Fm为一组面集,表示该域元所表示材料域的边界。Rm为一组依赖信息,表示该域元与其他域元的依赖关系,Rm包括横向依赖信息Rh和纵向依赖信息Rv,表示为Rm(Rh, Rv)。
域元的巴科斯-诺尔范式(Backus-Naur form, BNF)如下:
<域元>::=(<域元类型>,<侧壁节点>,{侧壁节点},<约束顶面>,<约束底面>,{顶面},{底面},[纵向父域元],{纵向子域元},[横向父域元],{横向子域元})
<类型>::=(<无岛屿>|<有岛屿>|<内陷>…)
<侧壁节点>::=(<侧壁节点类型>,{面})
<侧壁节点类型>::=(<轮廓>|<岛屿>)
性质1. 任一域元中必有一个轮廓侧壁节点,有零个或多个岛屿侧壁节点。
如图 2所示为域元模型,图中域元包含一个轮廓侧壁节点与一个岛屿侧壁节点。
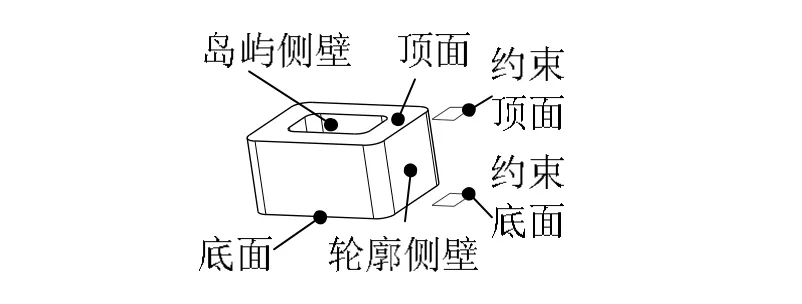
图2 域元模型
1.2 加工域模型
根据域元间纵向依赖关系,构建域元树状模型对加工域进行定义和表示,结果称为加工域模型。如图3所示,对任一工位ω(δi, δi+1),以一个空的域元节点为根节点,构造的域元为叶节点及中间节点。该域元树构建函数为:
其中,ɛ表示当前的工位方向信息,以一个坐标轴形式存储。ω(δi, δi+1)表示工位加工域,包括前件δi与后件 δi+1。Ur为加工域 ω分解构建的域元集,即Ur={ui|i=1, 2,…, n},ui为ω的一个域元,D为域元分解构建算子。
域元横向依赖信息Rh表示同一高度层内域元间父子依赖关系,尺寸较大的外侧域元为尺寸较小的内侧域元的父节点。横向依赖信息可为后续刀具选择及工艺规划提供限制条件,防止加工过程发生干涉与过切。
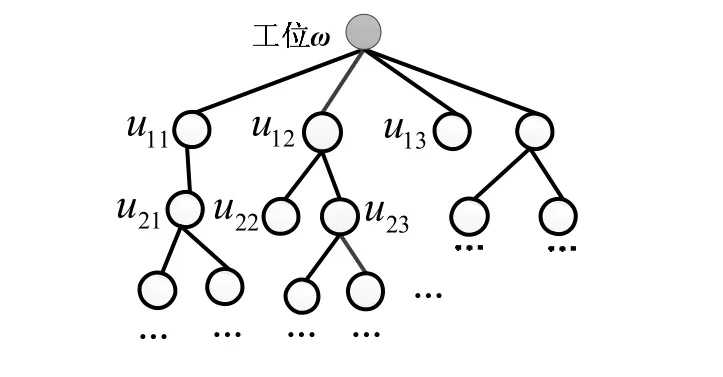
图3 加工域模型
图 4所示为域元分解示意图。图中域元间依赖关系可用嵌套括号法表示。纵向依赖关系可表示为:

式中,u0为预先构建的空的域元根节点,横向依赖关系可表示为:


图4 域元分解示意图
2 域元分层识别算法
2.1 关键术语
本文采用基于分层求交的识别方法对域元进行识别构造,下面对构造过程中的关键术语进行说明:
分层面是指根据工位方向ɛ,构建的在分层识别过程中与前件和后件相交的一组平行平面αj。如图5(a)中的α1、α2、α3。
层交面是指分层面与前件和后件相交所生成的结果面,其内存储交面与交环形式的相交结果。用αi表示当前分层面,V和T表示前件和后件,则前后件层交面可表示为sαiv(Fs, cs)、sαit(Fs, cs),其中,Fs为层交面中的交面集,cs为层交面中的交环集。如图 5(b)所示为分层面α2与前件后件相交得到的层交面sα2v及sα2t。
层域元是指域元在分层面间的部分。用αi表示层域元底部分层面,则层域元可表示为uαij,表示第i层第j个层域元。其主要作用是作为域元构建的中间结果。层域元间根据特定规则(见2.4节)合并可构成域元,如图5(c)所示。
层域元轮廓是指层域元与分层面的相交轮廓,可表示为 K(cc, Cd)。其中cc表示构成该轮廓的最外侧环,表示构成该轮廓的内侧岛屿环集。最外侧环cc与岛屿环集Cd间围成的有限区域即为层域元轮廓所表示区域。该轮廓是构建层域元的主要依据,如图 5(d)所示为图5(c)中层域元的轮廓。
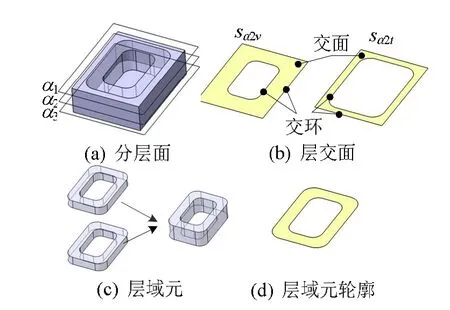
图5 关键术语
2.2 总体思路
首先根据前后件的模型信息与当前的工位方向构建分层面,分层面分别与前、后件相交,得到层交面;其次,根据层交面的交面、交环信息进行内外环关系判断,并在此基础上构建层域元轮廓;然后,由层域元轮廓与相关分层面构建生成层域元;最终,层域元合并生成域元,即完成了域元的构造。图 6为域元分层识别方法主要流程图。如图 7所示为上述构建过程的示例。图 7中共有 4个分层面与前、后件相交,得到层交面如图前两列所示。在此基础上构建层域元轮廓如图 K1、K2、K3,与相关分层面结合,生成层域元uα11、uα21、uα31,最终合并生成域元u1与u2。
因此域元的构造步骤为:划分分层面、生成前件和后件交面交环并进行交环识别、构建层域元轮廓、构建层域元、层域元合并及域元树的生成。其中层域元轮廓构建和层域元合并为关键步骤,下面对其详细阐述。
2.3 层域元轮廓构建
(1) 内外环树。根据文献[8]对内外环和环间及面间关系做如下定义:
拓扑面外边界的环称为该拓扑面的外环,其他均称为内环,如图8(a)所示。面间以及环间关系是类似的,可分为3种:分离(用符号→表示)、直接包含(用符号⊆表示)和间接包含(图8(d)中的环1与环3表示环的间接包含,图 8(g)中的面1与面3表示面的间接包含,用符号⋐表示),如图8所示。

图6 域元分层识别方法主要流程图
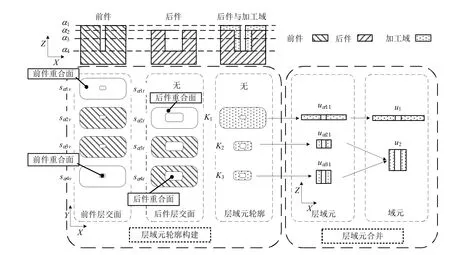
图7 域元分层识别构造方法

图8 环类型、面间关系及环间关系
内外环判断只需读取模型的拓扑信息即可。面间及环间的关系判断方法相同,用 ti表示环或面,Ti表示ti的直接包含元素集。>表示前者包围盒包含后者,≦表示前者包围盒不包含后者,则判断规则可表示如下:
规则 1.面或环间关系判断。设 t1、t2为两环或面,且t1包围盒尺寸较大,若t1≦t2,则t1→t2;若t1>t2,且∀t3∈T1,t3≦t2,则t2⊆t1;若t1>t2,且∃t4∈T1,使得t4>t2,则t2⋐t1。
环间关系还可用父子关系表示,本文规定内环与其同一拓扑面外环的子环,外环为直接包含该拓扑面的外层拓扑面中,直接包含该外环的某内环的子环,如图9(a)~(b)所示。根据环的父子关系即可对层交面中环以内外环树形式进行存储,其根节点为层交面中最外侧外环,由外到内各环为该树的中间节点和叶节点。按照规则 1对层交面中交面间关系进行判断,并获取交环的内外环信息,即可构建当前层前件和后件的内外环树Lαv、Lαt。
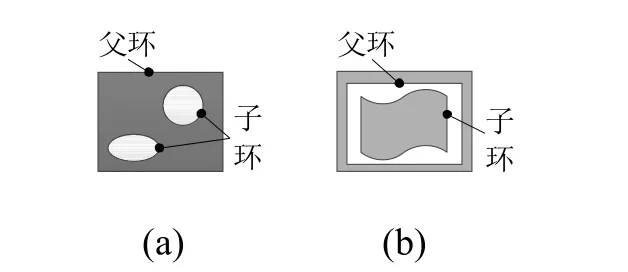
图9 环父子关系
(2) 层域元轮廓构建。由内外环树 Lαv、Lαt,即可构建生成层域元轮廓K(cc, Cd)。由于轮廓最外侧环cc与岛屿环集Cd的来源仅为前件与后件的内外环,故轮廓构成元素只有四类。用cqw、cqn、chw、chn分别表示当前层交面的前件外环、前件内环、后件外环与后件内环的集合。ci表示某环,设 ci为外环,则 Cin表示环 ci的子内环集;同理设 ci为内环,则Ciw表示环ci的子外环集。显然,环的包含关系有以下两性质:
性质2. 设 c1为某后件外环 c1∈chw,必存在某前件外环∃c2∈cqw,使得c1⊆c2。
性质3. 设c1为某前件内环c1∈cqn,若c1在某后件外环内,即∃c2∈chw,且 c1⊆c2,则后件外环必有一内环包含此前件内环,即∃c3∈C2n,使得c1⊆c3。
分析可知域元轮廓的构成共有6种基本情况,如图10所示。其中类型名表示层域元轮廓构成环的类型组合,如前外-后外表示该层域元轮廓构成环有两种,最外侧环 cc是前件外环,内侧岛屿环集Cd全为后件外环。若类型名只有一种则表示该层域元轮廓只有最外侧环cc而无内侧岛屿环集。
1、在高位推动上联合。切实把宣传定位于卫生计生工作的重要位置,纳入卫生计生目标管理责任,在日常工作中更加突出宣传先行先导的作用。
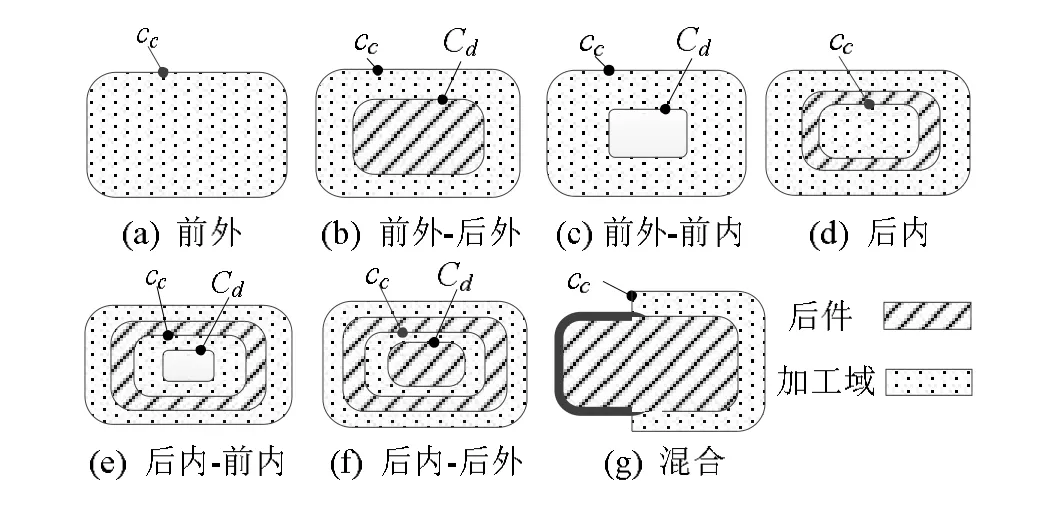
图10 层域元轮廓构成类型
给出层域元轮廓的构建函数如下:

其中,K为构建生成的层域元轮廓,k为构建算子,csqw为输入的某前件外环,cshn表示与输入的前件外环csqw相关的上层后件内环,其含义为该前件外环所在位置向外扩展遇到的最内侧后件内环,如图11所示,c2为c1的上层后件内环。其取值可为某后件内环或φ。规定当其取值为φ时,其子外环集中元素为当前层后件最外侧的外环,取值方法见规则2。

图11 上层后件内环
规则 2.上层后件内环取值。设c1=csqw,若c1为前件最外侧环,则cshn=φ;若c1不是最外侧环,则其必有父环用 c2表示,若∀c3∈chw,均满足c2→c3,则cshn=φ;若∃c3∈chw,使得c2⊆c3,则根据性质3可知∃c4∈C3n,使得c2⊆c4,则cshn=c4。
构建过程中遇到前件外环,即将其作为参数输入式(5)构建层域元轮廓,直到所有前件外环构建完毕,即完成轮廓构建过程。规则3至规则5为其构建规则。其中,规则 3为只有前件环构成的层域元轮廓构建规则,规则4是对基本情况前外-后外的构建规则,规则5为在规则4轮廓构建成功基础上,对其内部轮廓构建的准则。
规则3.前件环构成轮廓构建。设 c1=csqw,c2=cshn,若∀c3∈C2w,均满足 c3→c1,且 C1n=φ,则cc=c1,Cd=Cd∪φ;若∀c3∈C2w,均满足c3→c1,且C1n≠φ,则cc=c1,Cd=Cd∪C1n;若∀c3∈C2w,c3⊆c1,且∃c4∈C1n,c3→c4,则cc=c1,Cd=Cd∪{c4}。可处理图10(a)、(c)构成类型。
规则4.前外-后外轮廓构建。设 c1=csqw,c2=cshn,若存在c2的某子外环c3,直接包含于c1,即∃c3∈C2w,c3⊆c1,则cc=c1,Cd=Cd∪{c3}。可处理图10(b)构成类型。
规则 5.前外-后外内部轮廓构建。设c1=csqw,c2=cshn,且按照规则4,环c1与某后件外环c3已匹配,若∃c5∈C3n,使得∀c6∈C1n,c6→c5,且C5w=φ,则cc=c5,Cd=Cd∪φ;若∃c5∈C3n,∃c6∈C1n,使得c6⊆c5,则cc=c5,Cd=Cd∪{c6};若∃c5∈C3n,使得∀c6∈C1n,c6→c5,且 C5w≠φ,则 cc=c5,Cd=Cd∪C5w。可处理图10(d)~(f)构成类型。
图10中除前6种基本情况外,还有一种混合型轮廓,如图10(g)所示。混合型轮廓表示轮廓中只有最外侧环,且该环不是由以上 4种类型环单一构成,而是由不同类型环部分组合而成的情况。图10(g)中所示域元轮廓的最外侧环cc是由部分前件外环和后件外环组合而成的混合型环。对于混合型层域元轮廓,其对于层域元轮廓的构建规则不造成影响,只是环最终匹配生成轮廓时,若环间出现重叠情况,则将重合部分删去,两环剩余部分组成新环作为层域元轮廓。图10(g)中加粗部分即重合部分。用∩表示两环的构成线集进行交运算,用∪表示两环的构成线集进行并运算,-表示符号前的线集合删除与符号后线集合中相同的线,则上述过程可用规则6表示。
层域元轮廓实际为图10中情况间的组合或嵌套。图 12(a)即为前外-前内和前外-后外两种情况的组合,图12(b)为前外-后外和后内-后外的嵌套。对于组合情况根据不同规则对同一层域元轮廓进行构建即可,对于嵌套情况只需先后根据规则分别对层域元轮廓父节点与其子节点进行构建即可。
2.4 层域元合并

图12 组合与嵌套
首先由层域元轮廓 K构建层域元的侧壁面集Fα,生成层域元 uα,进而生成当前层的层域元集Uαr。层域元合并即为将层域元集按照特定规则合并生成域元u的过程,如图13所示。分层面从上到下的顺序决定了层域元合并也是从上到下的顺序。对每层而言,合并过程即为当前层层域元与其上层已生成域元间的合并过程。
层域元合并过程分为以下3个步骤:
(1) 层域元合并类型判断。根据层域元底部轮廓的依赖元素类型,将层域元分为可向下合并与不可向下合并两种类型,分别用hi=1和hi=0表示。用rci表示环ci的依赖元素类型,全为面时rci=0,全为线时rci=1,部分为面时rci=2。则层域元类型判断规则如下:
规则 7.层域元合并类型判断。设K(cc, Cd)表示某层域元uα底部轮廓,c1=cc,若∀c2∈Cd,rc1=0且rc2=0,则uα的类型为可向下合并,即 huα=1;否则,huα=0。
不可向下合并即表示层域元到此结束,不与下层层域元进行合并。如图13中所示层域元uα2底部轮廓依赖元素全部为面,为可向下合并类型,即huα2=1;而层域元uα3底部轮廓依赖元素部分为面,部分为线,为不可向下合并类型,即huα3=0。
(2) 直接合并子节点构建。对上层中每个域元,在本层中寻找分层面投影包围盒被其包围盒包含或重合的层域元,作为其直接合并子节点。如图13中uα3分层面投影包围盒重合于uα2的包围盒,则做为uα2直接合并子节点。上层已生成域元集用Uy表示,域元与层域元的分层面投影包围盒用 bui表示,表示包含或重合关系。上述判断规则可表示如下:
规则8.直接合并子节点。设 u1∈Uy,若∃uα2∈Uαr,使得buα2bu1,则将uα2作为u1的直接合并子节点。
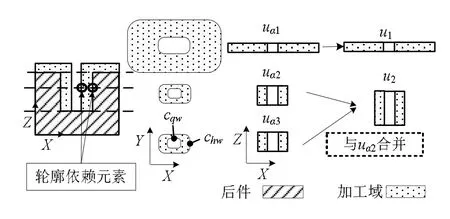
图13 层域元合并
(3) 依赖面集判断。取上层域元和其某直接合并子节点层域元的侧壁面集,判断是否完全相同。若完全相同,且上层域元为可向下合并类型,则进行合并;若不完全相同,则当前层域元作为其上层域元的子节点;若所有子节点与其依赖的上层域元依赖面集都不完全相同,则此上层域元结束。用Uhui表示域元 ui的直接合并子节点集,Fui表示域元ui的侧壁面。则上述规则表示如下:
规则 9.依赖面集判断。设 u1∈Uy,若∃uα2∈Uhui,使得Fuα2=Fu1,且hu1=1,则u1=u1∪uα2;若 Fuα2≠Fu1,则 uα2»u2;若∀uα2∈Uhui,均满足Fuα2≠Fu1,则表示此域元结束。
规则9中,∪符号两侧是域元,表示层域元合并,»表示将根据此层域元生成新的域元,并作为当前域元的子节点。
由以上合并过程可知,层域元与某上层域元合并需满足 3个条件:①上层域元类型为可向下合并类型;②层域元为该上层域元的直接合并子节点;③层域元与该上层域元的底部轮廓依赖面集完全相同。
按照上述合并规则,当最后一个分层面的层域元合并完成时,即完成了整个域元分层构造过程。
3 算法实现
3.1算法流程
该算法的输入参数为加工前件V、加工后件T以及工位信息ɛ,其输出参数为该加工域ω所对应的域元树Ur。算法主要步骤如下:
Step 1.划分分层面分别与前件和后件相交,得到层交面集{sαiv}、{sαit};
Step 2.按照分层面顺序,由层交面中交面与交环信息生成前后件的内外环树Lαv、Lαt;
Step 3.对内外环树,进行环匹配构建层域元轮廓K,并构建横向依赖关系;
Step 4.层域元轮廓与其相关分层面构建生成层域元,按照合并规则构建域元,并构建其纵向依赖关系;
Step 5.对域元校核与完善生成最终域元树,算法结束。
3.2 验证实例
在CATIAV5平台下进行程序开发以验证本算法。首先交互输入计算参数,即前件、后件几何体及加工坐标轴。本程序自动对域元分层识别,输出并以树状结构存储的域元数据。
测试工序件如图14(a)、(b)所示。该工序件包括外轮廓、13个槽、6条筋和4个开口。其加工域主要分布在槽侧壁与腹板面附近,如图 14(c)所示。采用本算法对该加工域分层识别,得到的域元结果如图14(d)所示。结果中包括域元的轮廓侧壁面、岛屿侧壁面以及底面。该结果与基于广义槽分层的加工特征自动识别方法[8]结果相比,考虑了工序前件对加工域的影响,更符合实际情况。该结果正确表示了工序件的加工域,满足飞机结构件工序件的自动数控编程要求。

图14 实例验证
4 结 论
为解决飞机结构件加工中对工序件的自动数控加工编程问题,本文提出了加工域元(域元)的概念,并设计了域元的分层识别构造算法。该算法根据工序件的实际数控加工过程,将加工域分解为若干相互独立的单元,并构建其依赖关系,进而生成可完整表达加工域数据信息的域元树。该识别结果可直接为加工单元构造提供准确的加工域数据。经过实例验证表明,该算法能较好地对工序件加工域进行识别构建,构建结果完整、合理,可应用于工序件的自动数控加工编程。
[1] 林 亨, 钟约先, 解云龙, 袁守华. CAM技术综述[J].计算机辅助设计与制造, 1995, (12): 5-7.
[2] Han J H, Pratt M, Regli W C. Manufacturing feature recognition from solid models: a status report [J]. IEEE Transactions on Robotics and Automation, 2000, 16(6): 782-796.
[3] Joshi S, Chang C. Graph-based heuristics for recognition of machined features from 3D solid model [J]. Computer-Aided Design, 1988, 20(2): 58-66.
[4] Prabhakar S. An experience:on the use of neural nets in form feature recognition [D]. USA: Arizona State University, 1990.
[5] Armstrong G T. A study of automatic generation of non-invasive NC machine paths from geometric models [D]. UK: University of Leeds, 1982.
[6] 谭 丰. 飞机结构件筋特征快速数控编程技术研究与实现[D]. 南京: 南京航空航天大学, 2010.
[7] 胡俊志. 飞机结构件槽腔特征数控编程技术的研究与实现[D]. 南京: 南京航空航天大学, 2008.
[8] 于芳芳. 飞机整体壁板快速数控加工编程系统关键技术研究与开发[D]. 北京: 北京航空航天大学, 2009.
[9] Chen Shulin, Zheng Guolei, Zhou Min, Du Baorui, Chu Hongzhen. Process-scheme-driven automatic construction of NC machining cell for aircraft structural parts [J]. Chinese Journal of Aeronautics, 2013, 26(5): 1324-1335.
Slicing Recognition of Machining Volume Unit for Aircraft Structural Parts
Li Chunhui1, Zheng Guolei1, Chen Shulin2
(1. School of Mechanical Engineering and Automation, Beihang University, Beijng 100191, China; 2. Shenyang Aircraft Industry (Group) Corporation Ltd, Shenyang Liaoning 110034, China)
Automatically recognizing the machining zone is one of the key technologies of automatic NC programming. To automatically recognize the machining zone of working procedure parts during the NC programming of aircraft structural parts, the model of machining zone is established and an available and feasible feature recognition approach is proposed as follows: firstly, slicing the part and blank with slicing planes which are constructed according to the working procedure parts; secondly, the feature profile is created according to the result of slicing, and then the machining volume units between the slicing planes are constructed; thirdly, the features are constructed by combining the units between planes based on the rules which are created previously; finally, through matching the vertical relationships among the features, a feature relationship tree is constructed. Through testing large number of aircraft structural parts in NC programming system, the validity and practicability of the method have been verified.
computer application; aircraft structural parts; feature recognition; numerical control machining; automatic programming; machining region
TP 391
A
2095-302X(2014)06-0847-07
2014-04-08;定稿日期:2014-05-16
国家重大科技专项课题资助项目(2012ZX04010051)
李春晖(1988-),男,河北邯郸人,硕士研究生。主要研究方向为CAD/CAM、数控自动编程。E-mail:lichunhuiok@163.com
郑国磊(1964-),男,福建莆田人,教授,博士生导师。主要研究方向为CAD/CAM、夹具智能化设计和数字化装配。E-mail:zhengguolei@buaa.edu.cn
