基于彩色同心圆的投影仪标定算法
2014-03-16严永财
严永财,李 燕
(暨南大学 信息科学与技术学院,广东 广州 510640)
基于结构光编码技术的主动视觉系统与传统的立体视觉系统的区别在于,主动视觉系统至少包含一台向场景投射编码结构光的投影仪和一台采集场景图像的摄像机。投影仪的存在使主动视觉系统可以控制特征点的邻域信息以标识特征点,从而解决了传统视觉系统特征点匹配的问题。目前,关于主动视觉系统的研究已渐渐深入,且已经广泛应用于互动娱乐、工业测量、机器人视觉等领域。在运用主动视觉系统进行三维重建之前,必须对摄像机和投影仪进行标定,而且标定结果直接影响三维重建的精度。
摄像机标定算法的研究起步较早,已经发展得比较成熟,其中基于平面的标定算法由于其较高的标定精度和简单的标定操作得到了广泛的应用,常用的有Z.Zhang的棋盘格算法、G.Jiang的基于同心圆算法、Tsai标定法。而对于投影仪的平面标定算法,通常是求出标定板与投影图像的点对应关系,然后用类似相机标定的方法来标定投影仪[1-5]。其中一类方法事先标定摄像机[1],通过反投影来求解投影到场景的特征点的三维坐标,用此类方法,投影仪的标定精度会受摄像机标定精度的制约;另一类方法不事先标定摄像机,S.Zhang等[2]运用正弦光栅投影,通过求垂直和水平两个方向的相位来得到标定平面上的固有特征点在投影图像中的对应点;孙勇等[3]将投影图像和标定板图案设置为一模一样的棋盘格,将两者在相机中的成像对正,来间接求解投影图像与标定平面间的单应;D.Moreno等[4]提出投影高密度的编码结构光给标定平面的固有特征点在投影图像中的对应点定位的方法。本文提出基于彩色同心圆的投影仪标定算法不需要事先标定摄像机,也不必像其他既有的标定算法那样需要求出投影图像与标定板之间的单应,其最大优势在于操作和处理的简易性和结果精确度的兼顾。
基于彩色同心圆的投影仪标定需要固定投影仪和摄像机,用投影仪向一个画有一组青色同心圆的标定平面投影黄色洋红色相间的棋盘格图像,摄像机采集场景图像;在预处理中利用RGB通道过滤方法分离图像中的同心圆和棋盘格分量;分析棋盘格分量可以得到投影图像和摄像机图像关于标定平面的单应矩阵Hcp;分析同心圆分量结合上一步得到的Hcp可以求标定平面Circular Points在投影图像中的对应点;用这些对应点拟合的圆锥曲线可以求出投影仪的内参数矩阵。此方法不仅简化了主动视觉系统的标定过程,而且获得理想的标定精度。
1 投影仪标定
1.1 投影仪模型及坐标系定义
投影仪可以看成投影方向相反的摄像机,用针孔相机模型来描述投影仪。XP是投影图像中特征点的齐次坐标,X是Xp将投影到标定板上得到的对应点齐次坐标,则有,

其中 Pproj=Kp[R][T]为 3×4的投影矩阵,R、T分别是世界坐标系相对投影仪坐标系的旋转矩阵和位移向量,Kp是投影仪内部参数矩阵,

其中 fu、fv分别是投影仪 u、v方向的焦距,s是倾斜参数,(u0,v0)是投影仪的主点(Principal Point)。
标定系统的坐标系定义如图1所示。

图1 坐标系定义Fig.1 The definitions of the coordinate systems
世界坐标系OwXwYwZw定义为与摄像机坐标系重合,即OwXwYw与摄像机图像平面平行且Zw垂直于摄像机图像平面。投影仪坐标系定义OpXpYpZp与摄像机坐标系定义类似。
1.2 同心圆的秩1约束和秩2约束
本文投影仪内参数矩阵求解过程以及图像预处理中同心圆分量的边缘筛选,都运用到同心圆投影变换前后均满足的约束[8]:秩1约束和秩2约束。
对于已知同心圆C1、C2,其对偶圆锥曲线的线性组合为C′*=λ1C1-1+λ2C2-1, 当 C′*满秩时,C′*与 C1、C2同心的圆 C′的对偶圆锥曲线;当C′*的秩为1,C′*是圆心c的对偶圆锥曲线;当 C′*的秩为 2,C′*是同心圆所在平面的 Circular Points I、J的对偶圆锥曲线。C1、C2经过投影变换 H变换为 Q1、Q2,当Q′*=λ3Q1-1+λ4Q2-1的秩为 1, 此时的 Q′*为 Q1、Q2的秩 1 约束,记为

Δ1实际上是C1、C2的圆心在Q1、Q2所在平面上的对应点的对偶圆锥曲线,当 Q′*的秩为 2 时,此时的 Q′*为 Q1、Q2的秩2约束,记为

Δ2是 C1、C2所在平面的 Circular Points 在 Q1、Q2所在平面上的对应点的对偶圆锥曲线。对Δ2奇异值分解可以得到I′、J′
由公式(7)(8)可知,由两平面的单应矩阵可以求出其中一个平面的Circular Points在另一个平面上的对应点,但是用一组同心圆映射得到Δ2的奇异值分解只能得到的 I′、J′的位置,而不能得到 I′、J′与 I、J的对应关系。
如果已知Q1、Q2是一组同心圆的投影,则Δ1、Δ2可以通过广义特征值分解得到。Q1、Q2的广义特征值有3个α、α、β,α是重解,则

1.3 投影仪标定原理
基于彩色同心圆的投影仪标定算法关键是用同心圆投影变换前后需满足的秩2约束求标定平面的Circular Points在投影图像中的对应点和用对应点拟合圆锥曲线求出投影仪内参数矩阵。
秩2约束是分析采集图像的同心圆分量和棋盘格分量得到的。分析棋盘格分量,用DLT算法可以求摄像机图像到投影仪图像的单应矩阵Hcp;由同心圆分量可以得到标定平面的 Circular Points Iw、Jw的成像 Iwc、Jwc,则 Iw、Jw在投影图像中的对应点Iwp、Jwp分别为:

变更标定平面的方位采集3幅以上图像得到3组以上Iwp、Jwp即可拟合出Absolute Conic在投影平面上的对应圆锥曲线 ωp。
用ωp可以求投影仪的内部参数矩阵Kp。假设投影图像中的一点Xp,在三维场景的无穷远处有唯一的对应点X∞,X∞在无穷远平面上 π∞=[0,0,0.1]T,则

其中,X˜∞可以看作Xp在无穷远平面上的投影点在无穷远平面坐标系(无穷远平面坐标系中齐次坐标X˜∞,与世界坐标系的X∞对应)中的齐次坐标,H∞是π∞到投影图像的单应矩阵。在无穷远平面坐标系下,Absolute Conic可以表示为单位矩阵I,则Absolute Conic在投影图像中的对应圆锥曲线为

因此,对ωp进行Cholesky分解可得Kp-1。
1.4 采集图像的预处理
由于采集的图像棋盘格分量和同心圆分量交织在一起,因此在执行2.2的标定过程之前,必须对采集图像预处理以分离两个分量。标定板的彩色同心圆如图2(a)所示,将棋盘格投影到标定板上,摄像机采集的图像如图2(b)所示。青色的同心圆与黄色棋盘格重合位置变成绿色,与洋红色棋盘格重合位置变成蓝色,预处理步骤如下:
1)通过红色通道并用Canny算子边缘检测得到如图2(c)的边缘图;
2)提取出满足秩2约束的两条边缘,标记为同心圆边缘,从而分离出同心圆分量为图2(d)中的高亮部分;
3)综合绿色通道和蓝色通道图像后,由于系统的色彩还原度较差,残余的同心圆分量仍会影响棋盘格角点的提取,进一步进行直方图均衡化,得到图2(e);
4)对图2(e)自适应阈值分割后得到的棋盘格分量如图2(f);
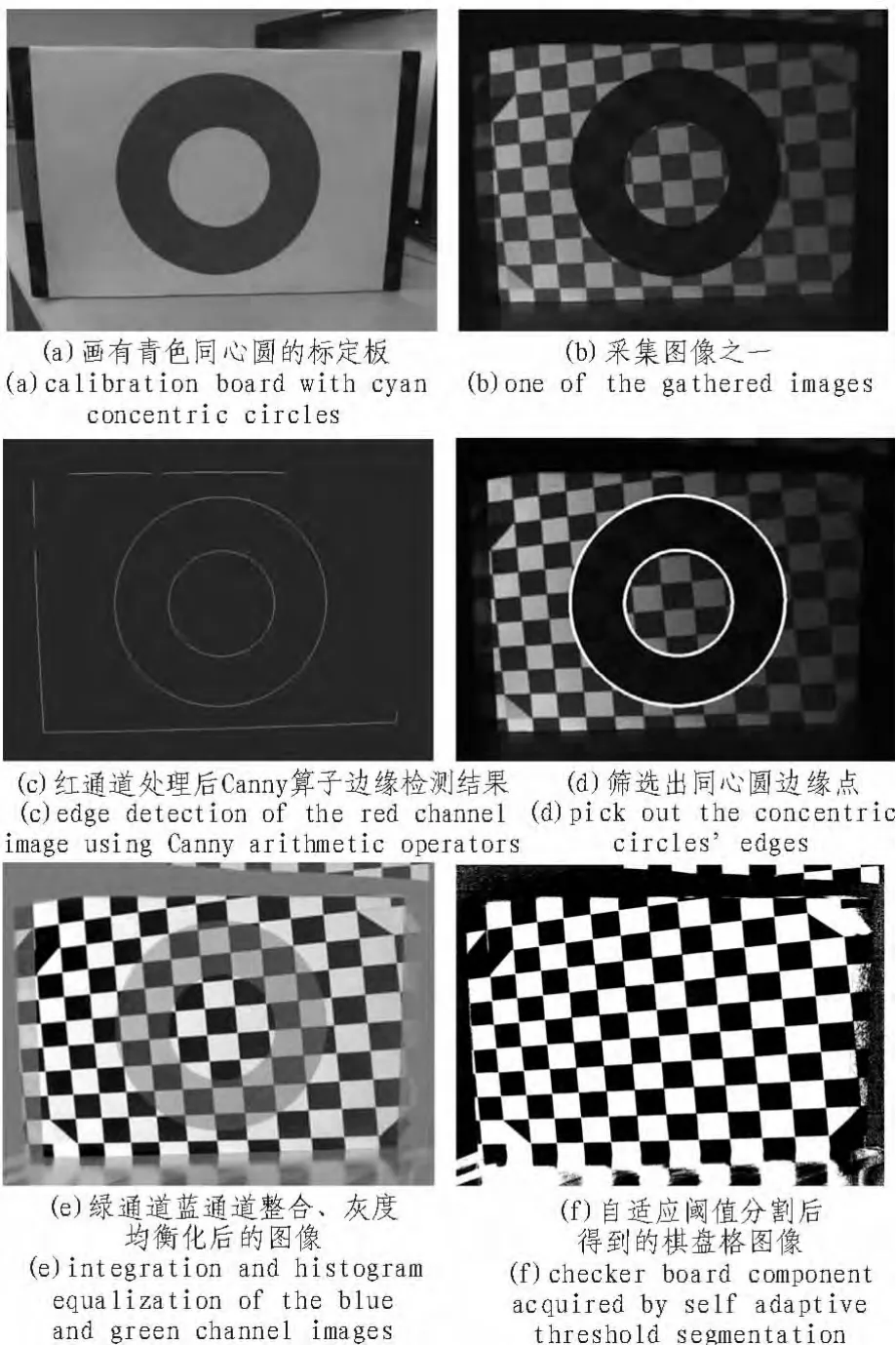
图2 采集图像的预处理过程Fig.2 The preprocessing of the gathered images
1.5 同心圆标定算法的主要流程
1)对采集图像预处理,分离同心圆分量和棋盘格分量;
2)由同心圆分量计算 Iwci、Jwci(i=1,2,…,n)(可标定摄像机内参数 Kc);
3)由棋盘格分量,求关于种朝向的标定平面的 Hcp1、Hcp2、…、Hcpn;
4)利用公式(11)(12)求出 Iw、Jw在投影图像中的组对应点 Iwpi、Jwpi(i=1,2,…,n);
5)用最小二乘法拟合出Absolute Conic在投影图像中的对应圆锥曲线ωp;
6)对ωp进行Cholesky分解得到Kp-1,求逆矩阵得到投影仪内参数矩阵Kp。
2 实验与数据
搭建一个主动视觉系统,通过对投影点的三维重建来分析投影仪标定算法的精度。重建之前需要标定摄像机和投影仪,用采集图像的同心圆分量来标定摄像机。投影仪采用Sony VPL CX21 3LCD投影仪,分辨率为1 024×768;摄像机采用MicroVision MV3000FC彩色CCD数字相机,分辨率为2 048×1 536;投影图像为品红色、黄色相间的棋盘格,有效区域为靠近中心的的区域;标定板上画有一组内外半径分别为12.5 cm和25 cm的青色同心圆。
由于一个标定板朝向只需采集一幅图像,故图像采集过程十分简单,不需要特殊器械来固定标定板。操作过程为:固定好投影仪和摄像机;投影仪向画有青色同心圆的标定板投射黄色洋红色相间的棋盘格;摄像机采集图像;重复改变标定板位置和采集图像这2个步骤直到采集到3幅以上的图像。
实验将摄像机和投影仪中心距离定为500 mm,执行2.4所述的步骤标定出投影的内部参数矩阵如表1所示。通过重建2 926个点 (此时重建点到摄像机投影仪的平均距离约为1 200mm),用重建点到拟合平面的距离来衡量内参数的精度。实验中重建点偏移拟合平面的距离如图3所示。重建点到拟合平面的平均距离为0.634 4mm,偏移距离的均方根为0.794 3mm。

表1 投影仪标定结果Tab.1 Results of projector calibration
由以上的误差分析可知,基于彩色同心圆的标定算法不是追求最高的标定精度,其精度相对于那些基于结构光编码的标定方法[6]尚有一定的差距,但是已经能与现有的许多方法[7]的相当。此方法利用了同心圆图案特征容易提取且与投影仪内参数矩阵相关性高的特点,并充分利用标定图案的颜色空间,使其具备其他标定算法所不具有的便利性。最少只需3幅图像便可以标定投影仪及摄像机,比精度相近的算法[5,7]平均少采集一半图像;标定板在一个位置只需要采集一个图像,故不需要其他器具辅助,仅需徒手固定标定平面。
3 结束语

图3 重建点相对拟合平面的偏移Fig.3 Distance between reconstructed points and fitting planes
基于彩色同心圆的投影仪标定算法有效利用简单的同心圆及棋盘格成像所提供数据,求摄像机图像和投影图像间的单应矩阵结合同心圆的秩2约束完成投影仪的内参数标定。此外,本文还将传统方法中标定摄像机和标定投影仪的两个图像整合到一个彩色图像中,不仅减少了图像采集量,还省去了标定板一个朝向需采集两幅图像的繁琐操作,大大简化了投影仪标定过程,最重要的是其标定精度仍然十分可观。
[1]Fernandez S,Salvi J.Planar-based camera-projector calibration[C]//The 7th International Symposium on Image and Signal Processing and Analysis,2011.
[2]Zhang S,Huang PS.Novelmethod for structured light system calibration[J].Optical Engineering,2006,45(8):83601.
[3]Sun Y,Li Y,Wang Q,et al.Calibration of the Structured LightSystem Based on Active Projection[C]//Proceedingsof the 30th Chinese Control Conference,2011:22-24.
[4]Moreno D,Taubin G.Simple,Accurate,and Robust Projector-Camera Calibration[C]//Second Joint3DIM/3DPVTConference:3D Imaging,Modeling,Processing,Visualization&Transmission,2012.
[5]张东,唐立新.基于彩色圆形标记投射的投影仪标定方法[J].计算机与数字工程,2011,39(4):123-127.ZHANG Dong,TANG Li-xin.A Method of Calibrating Projector Based on Projecting Color Circular Marks[J].Computer&Digital Engineering,2011,39(4):123-127.
[6]韦争亮,钟约先,袁朝龙,等.单摄像机单投影仪三维测量系统标定技术 [J].清华大学学报,2009,49 (2):202-205.WEI Zheng-liang,ZHONG Yue-xian,YUAN Chao-long, et al.Calibration of a 3D measurement system having one camera and one projector[J].JTsinghua Univ(Sci&Tech),2009,49(2):202-205.
[7]费建锋,毕德学,王永强,等.基于投影二维平面靶标的投影仪现场标定方法研究[J].传感器与微系统,2008,27(4):34-39.FEIJian-feng,BIDe-xue,WANG Yong-qiang,et al.Research on online calibration of projector based on projecting 2 D planar target[J].Transducer and Microsystem Technologies,2008, 27(4):34-39.
[8]Kim J,Gurdjos P,Kweon I.Geometric and algebraic constraints of projected concentric circles and their applica-tions to camera calibration[J].IEEE Transaction On Pattern Analysis and Machine Intelligence,2005,27(4):637-642.
