多功能太阳能探测船
2014-03-16李卫兵史经伦苗海委
孙 琼 , 李卫兵 ,2, 史经伦 , 张 立 , 苗海委
(1.滨州学院 物理与电子科学系,山东 滨州 256600;2.滨州学院 航空信息技术研发中心,山东 滨州 256600)
水利部门、水养殖业等行业中需要了解河流湖泊的深度、温度等参数,以及获取水样进行检测以制定相应的应对方案,并向河流湖泊中投放净水物质。而目前测水深、水温、取水样、投放净水物质等多采用人工作业的方式,不仅费时费力,而且效率低带有一定的危险性[1]。为改善这种状况,我们设计了多功能太阳能探测船。该系统分为上位机控制部分和下位机功能实现部分,上位机和下位机通过ZigBee进行信息传递。该设计可作为水利部门、渔产养殖等需要对河流湖泊进行水文监测、水质改善等行业的高效方便工具。系统由远程控制,可到达不易人工作业的场合,避免了人工作业的危险性、困难性等问题。
1 系统总体设计方案
系统以STC89C52单片机作为船体主控制器,上位机通过ZigBee无线模块与船体实现通信。充电控制电路控制太阳能电池板给铅蓄电池进行充电,为船提供动力。上位机发送指令后,其各项功能均为自动化实现,相应任务完成后,数据会自动发回上位机。另外可通过控制视频云台进行多角度查看周围环境,方便时时检测和分析水质[2]。系统总体结构框图如图1所示。
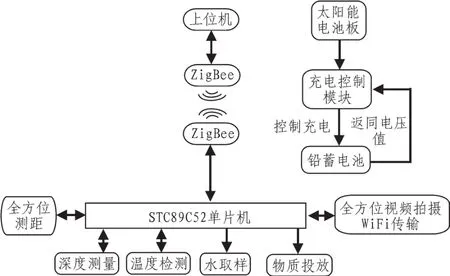
图1 系统的总体框图Fig.1 The overall block diagram of the system
2 电路设计
2.1 主控制器模块
系统使用STC89C52单片机做为主控制器。STC89C52是一种低功耗、高性能CMOS8位微控制器,具有 8 K在系统可编程Flash存储器。STC89X52可降至0 Hz静态逻辑操作,支持2种软件可选择节电模式。空闲模式下,CPU停止工作,允许RAM、定时器/计数器、串口、中断继续工作。掉电保护方式下,RAM内容被保存,振荡器被冻结,单片机一切工作停止,直到下一个中断或硬件复位为止。最高运作频率35MHz,6T/12T可选[3]。 该型号单片机可有效满足我们的设计要求。
2.2 ZigBee远程控制接收模块
该系统的无线设备使用的是ZigBee模块,ZigBee是一种新兴的无线网络协议[4]。ZigBee模组采用 UZ2400芯片为核心,可以提供硬件的 MAC层和 PHY层驱动,采用 SPI方式与主控制器通信,操作方便,可以实现无线局域网互联和数据传输等。其特点是低复杂度、自组织、低功耗、低数据速率、低成本[5]。主要适合用于自动控制和远程控制领域,可以嵌入各种设备,对环境条件要求小。ZIGBEE模块在在该系统设计中起到远程传送上位机发来的指令给探测船进行各功能实现,并将探测数据发回到上位机进行显示。ZigBee远程控制接收模块电路图如图2所示。
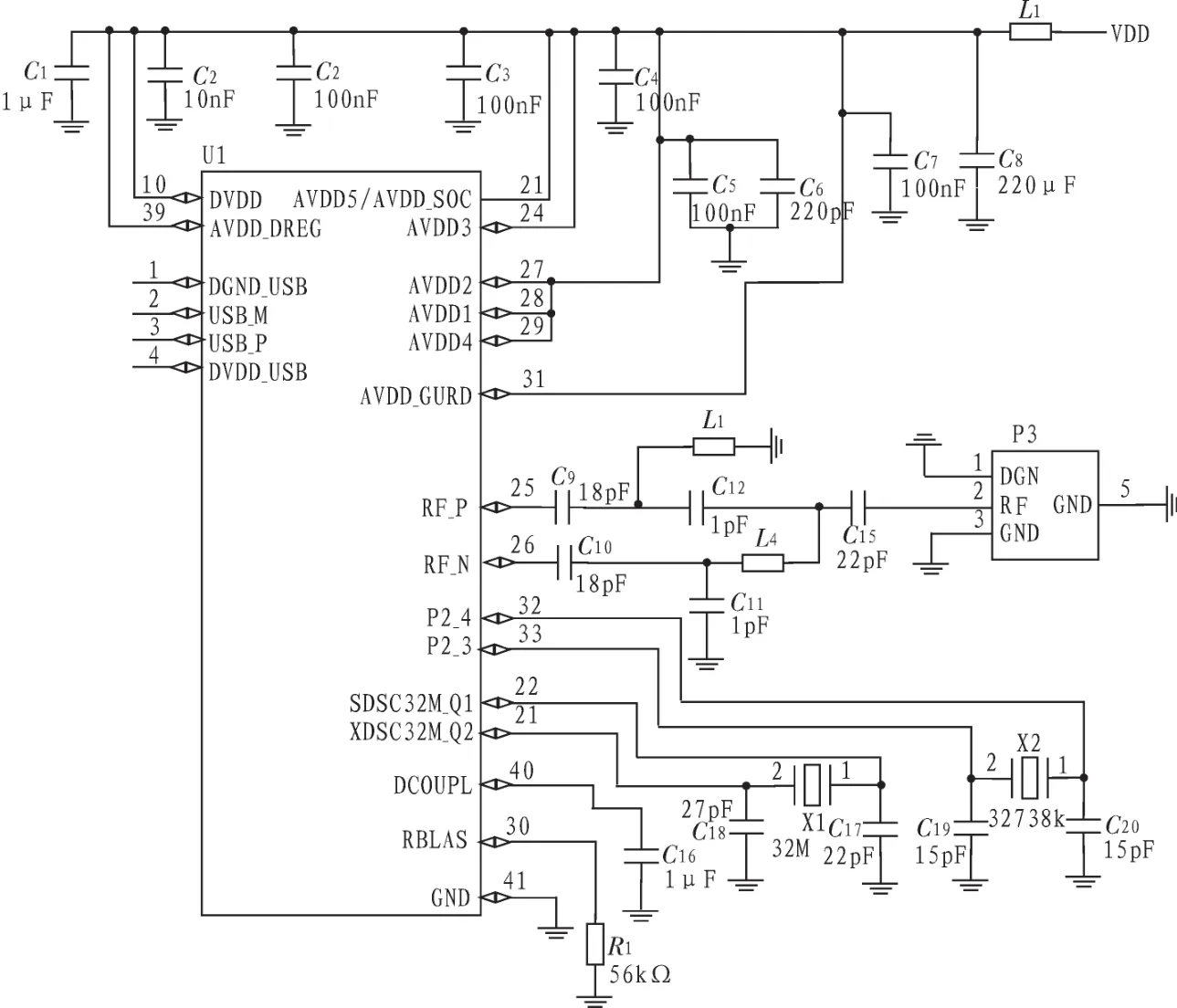
图2 ZigBee远程控制接收模块电路Fig.2 ZigBee remote control receivingmodule circuit
2.3 船行驶控制模块
使用R775三拓电机、大功率电机电调和螺旋桨相组合为该船提供前进动力,使用舵机控制船的行驶方向。船行驶、方向控制示意图如图3所示。
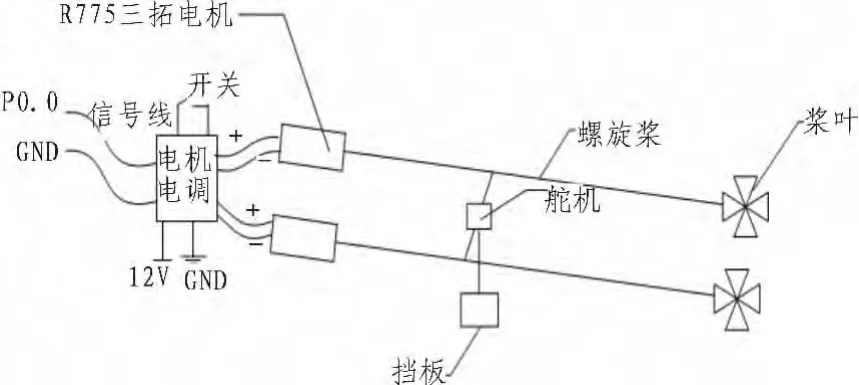
图3 船行驶、方向控制示意图Fig.3 The shipmoving,direction control plan
大功率电机电调具有功率大,可靠性高等特点。其输入电压3.3~5 V,输出电压12 V。使用时用单片机给其提供PWM信号,信号频率为50 Hz,一个周期为20ms。对于电调来讲,高电平脉宽为1ms表示停转,增加高电平脉宽可提高其输出功率,最高为2ms的高电平脉宽。电调输出端可同时驱动两个电机。这样使船速可调,控制灵敏度高。PWM信号波形如图4所示。
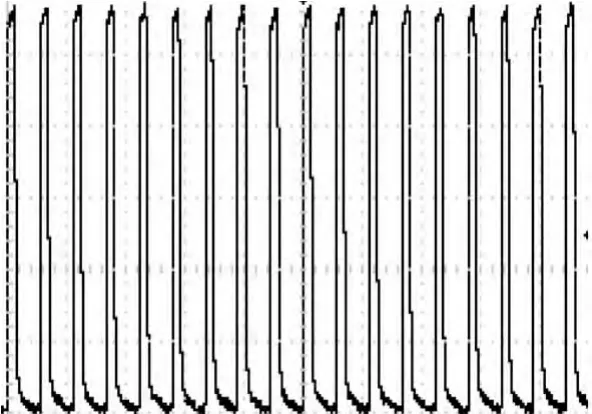
图4 PWM信号波形Fig.4 PWM signalwaveform
2.4 水深度温度测量模块
本模块由圆盘、电机、黑白线检测传感器、防水型温度传感器构成。绳的一端连接重物,另一端缠绕在固定尺寸圆盘上,转盘由L298驱动的直流减速电机带动其旋转,转盘上贴有白色胶布,通过黑白线检测传感器可计算转盘旋转圈数。当重物到达河底时,绳子不受重物拉力,而处于松弛状态,通过一个自制的检测装置检测到这一现象,并向单片机发回一个低电平,单片机获取信息后,控制电机停止转。通过黑白线检测传感器可计算转盘旋转圈数,进而有圆盘周长乘以圈数可得知当前水深值。当测量结束收回细绳,重物到达原位置后,系统可自动停止转盘转动。此方案具有成本低,误差小,容易操作的特点。
采用防水型水温探头测量温度,水温探头与水深测量装置的重物端连接在一起,当返回水深数据的同时可返回水温数据。也可由上位机发送指令进行特定水深的温度测量,所测数据发回上位机进行显示。温度传感器DS18B20测温范围-55~+125℃,在-10~+85℃时精度为±0.5℃,在使用中不需要任何外围元件,采用独特的单线接口方式,DS18B20在与单片机连接时仅需要一条口线即可实现单片机与DS18B20的双向通讯。其使用简单,价格低,精确度高[6-7]。 水深、水温测量整体装置图如图5所示。
2.5 水取样模块
将细水管缠绕在转盘上,小型抽水机固定在圆盘上随转盘一起转动,防止水管在旋转时由于一端固定而打结。转盘由直流减速电机带动其旋转。当到达预设水深时,单片机控制继电器闭合,进而控制抽水机开始工作。其中控制水管入水深度原理类似于水深、水温测量装置原理。
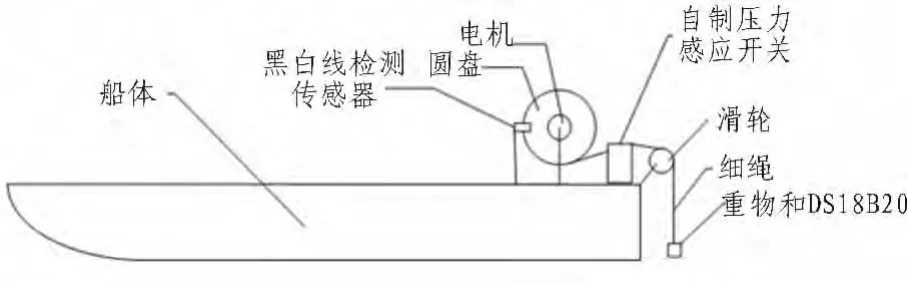
图5 水深、水温测量整体装置图Fig.5 Water depth,water temperaturemeasurement device figure as awhole
2.6 太阳能电池板充电模块电路
该太阳能充电模块电路,标称功率20 W,峰值电压17.28 V,峰值电流1.16 A,最大开路电压 21.24 V,短路电流1.31 A的太阳能电池板为蓄电池进行充电。太阳能电池板输出端电压经过充电控制电路后,可有效为蓄电池进行充电并对其进行充电保护。充电控制电路最高充电电压14.4 V,浮充充电电压1.6 V,欠压返回电压12.4 V,欠压保护电压10.8 V。该充电电路具有防止蓄电池过度充电、过度放电、防反接保护等功能。太阳能充电控制电路如图6所示。
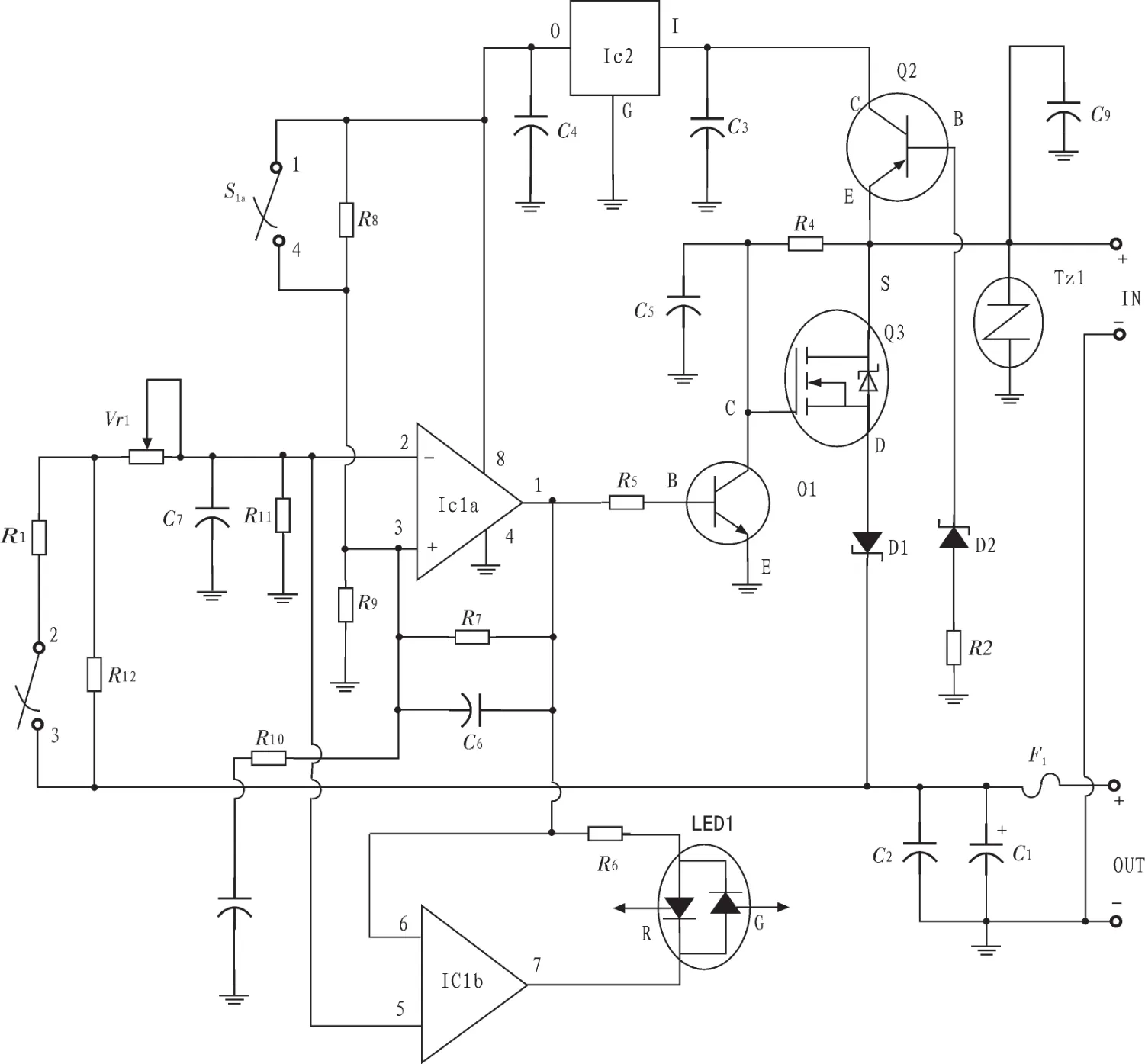
图6 太阳能充电控制电路Fig.6 Solar charge control circuit
3 软件设计
3.1 主程序功能描述
上位机发送相关指令经无线传输,单片机接收后执行相关指令,并返回必要的数据。在船行驶过程中关闭其他各项探测功能。根据收到的指令船可实现加速、减速、停止、左转、右转、直行。船到达要求位置停止后可进行其他各项探测功能,并关闭船行驶控制程序。根据上位机发来的指令,该探测船可控制太阳能电池板充电开关;实现水深检测并实时发回上位机进行显示;特地水深水温检测并发回上位机显示;不同水深水取样,当储水仓满时自动关闭抽水机,并将出水管转入下一个储水仓;实现用抽水机投放液态物质,当物质投放完毕,自动关闭抽水机;全方位测距和视频拍摄等功能。程序设计流程图如图7所示。

图7 程序设计流程图Fig.7 The flow chart of program design
3.2 系统上位机
系统PC机端上位机软件,使用LabVIEW编写。LabVIEW是一种程序开发环境,与其他计算机语言的显著区别是:其他计算机语言都是采用基于文本的语言产生代码,而LabVIEW使用的是图形化编辑语言G编写程序,产生的程序是框图的形式。入门快操作简单,界面效果好。我们在使用LABVIEW进行上位机软件编写时,将各指令发送以图形按钮形式显示,也可手动输入指令进行发送,从而使指令发送操作简单易掌握。上位机接收数据后以温度计、水深计、折线图等图形化工具显示各参数,使数据接收界面形象直观,便于记录分析。多功能太阳能探测船上位机界面如图8所示。
4 结 论

图8 多功能太阳能探测船上位机Fig.8 The uppermonitor ofmultifunction solar detection boat
本系统设计采用太阳能作为其能量来源,实现了节能环保。各部分功能采用远程人工控制,避免了人工操作的危险性,减少了工作量,提高了工作效率。并且该设备体积较小,便于搭载,方便较远距离运输。设计实现功能较全面,可实现水深测量、不同水位水温测量、水取样、消毒杀菌物质的倾倒、全方位测距和视频拍摄,因此可用于河流湖泊水体综合指标的获得,提高了其利用价值并扩大了其利用场合。系统具有控制方便、性能可靠、成本低等特点,加上经过优化的程序,使其有较高的智能化水平。
[1]张锡辉,李福志.国外水质安全性评价体质及方法[J].中国建设信息(水工业市场),2006(18):46-49.ZHANG Xi-hui,LI Fu-zhi.The water safety evaluation of physical fitness and methods of foreign country[J].China Construction Information (Water Industry Market),2006(8):46-49.
[2]李卫兵,孙琼.一种多功能太阳能水质探测船:中国,ZL 201320210646.3[P].2013.
[3]段晨东.单片机原理及接口技术[M].北京:清华大学出版社,2008.
[4]彭瑜.低功耗、低成本、高可靠性、低复杂度的无线电通信协议——ZigBee[J].自动化仪表,2005(5):1-4.PENG Yu.Low power consumption, low cost, high reliability,and low complexity of radio communication protocol ZigBee[J].Automation Instrument,2005(5):1-4
[5]崔文华.ZigBee协议栈的研究与实现[D].上海:华东师范大学,2007.
[6]张宪.传感器与测控电路[M].北京:化学工业出版社,2011.
[7]陈石波,杨德刚,杨有,等.基于51单片机的公厕蹲位显示系统设计与实现[J].重庆师范大学学报:自然科学版,2013(3):89-93.CHEN Shi-bo,YANG De-gang,YANG You,et al.System design and implementation based on 51 single-chip display squatting toilets[J].Journal of Chongqing Normal University:Natural Science,2013(3):89-93.
