太阳能光伏板定向跟踪装置的设计与研究
2014-03-15李国平
彭 可,聂 健,邵 添,李国平
(湖南师范大学工学院,湖南 长沙 410081)
太阳能作为一种理想的可再生能源,但由于其能量密度低、接收连续性差,随季节、昼夜、地理位置,气候条件的变化而变化。为提高太阳能的利用效率,许多企业和大学都设计出了他们自己的太阳能跟踪系统。根据权威实验测试显示,单轴跟踪装置比固定装置的发电量提高约25%,双轴跟踪装置比固定装置的发电量提高约35%[1],因此进行太阳能跟踪装置的研究是很有必要的。本文设计出的高度角-方位角[2]式双轴跟踪机构形式,能够在俯仰和水平两个方位上跟踪太阳。控制方式的选取也会影响设备利用太阳能的性能,为提高跟踪精度,本文的控制方式采取视日运行轨迹[3]跟踪与爬山法跟踪相结合互补跟踪。
1 跟踪装置机械系统方案设计
1.1 传动方案与双轴系统方案
随着太阳能光伏发电系统的日渐成熟,人们对太阳能跟踪系统的需求也越来越大,很多高校和公司都相继推出自己的太阳能跟踪系统。有的基于丝杆机构,有的基于大减速比齿轮机构,有的基于液压机构,有的采用多种机构结合使用的方案。考虑到系统需要结构简单,成本低廉,并具有防风等要求,本文设计的跟踪系统是基于高度角-方位角的立柱式双轴跟踪装置[4],该装置占地面积小,易于安装和大型化,方位角的驱动使用步进电机驱动涡轮蜗杆减速器,高度角驱动机构为了结构紧凑和小型化,选择电动推杆。
机械结构的设计考虑了东西水平方向和南北垂直方向两个方向上的跟踪,水平方向由步进电机驱动,跟踪太阳方位角;南北垂直方向,使用自带电位计的电动推杆驱动,跟踪太阳高度角。即跟踪装置设有两根轴,能够对太阳高度角和方位角同时进行跟踪,提高了跟踪精度和对太阳能的利用效率。
1.2 跟踪装置机械结构设计
目前,太阳能电池板按放置方式的不同有:直板式、叠加式等。考虑其抗风能力的要求,本文采用直板式。机械结构原理如图1所示,跟踪系统由1个立柱,2个自由度的旋转机构,上框架组成。其中上框架由轻质铝合金制成,可固定两块太阳能电池板,水平轴通过左右两个轴承与上框架上的角铁连接在一起,上框架可以绕水平轴转动。电动推杆与上框架固定在一起,可以推动上框架带动太阳能电池板绕水平轴作俯仰运动,跟踪太阳高度角的变化。步进电机通过联轴器连接涡轮蜗杆带动垂直轴在水平面内转动,跟踪太阳方位角。本系统可以驱动太阳能电池板在方位角上实现0~180°旋转,高度角实现5~90°翻转,通过高度角与方位角的同时跟踪,实现对太阳的全方位跟踪。

①太阳能光伏板;②太阳能光伏板上框架;③水平轴承;④水平轴;⑤蜗轮;⑥垂直轴;⑦整体支座;⑧蜗杆;⑨联轴器;⑩步进电机;电动推杆图1 跟踪装置传动方案Fig.1 The transmission scheme of the tracking device
2 跟踪控制系统硬件设计
系统采用宏晶科技生产的STC12C5A60S2的单片机。该单片机具有功耗低、速度快、抗干扰强等特点,可以作为民用太阳能跟踪装置的主控制芯片。跟踪控制系统由主控制器、电压信号采集电路、LCD显示电路、DS1302时钟电路、中断按键电路、步进电机驱动电路、限位控制电路、以及电动推杆驱动电路等电路组成。控制系统如图2所示。

图2 控制系统框图Fig.2 The control system
控制系统各部分实现功能如下:
1) 电压信号采集电路:用于采集光伏板两端的输出电压,判断外部光线强弱。比较不同位置采集的输出电压大小,从而判断太阳。
2) RTC实时时钟:用于向单片机提供当前日期和时间信息。
3) LCD显示屏:用于显示当前时间、太阳高度角、方位角、电池板输出的电压、功率等信息,方便调试。
4) 中断按键电路:用于手动调整步进电机和电动推杆的转动角度以及控制LCD显示屏的显示信息。
5) STC12C5A作为控制器核心芯片,输出控制信号驱动步进电机和电动推杆对太阳位置进行跟踪。
3 控制方式及其特点
在太阳能跟踪控制系统中,控制系统按照输出端是否存在反馈可以划分为以下3类:开环控制、闭环控制和混合控制。如果不存在反馈称为开环控制,存在反馈称为闭环控制,开环与闭环控制方式同时使用称为混合控制。
开环控制方式,常用的方法为视日运行轨迹跟踪。
闭环控制方式,一般利用传感器跟踪,即光电跟踪。本文提出一种新的闭环跟踪方法——爬山法。
3.1 视日运行轨迹跟踪
视日运行轨迹跟踪原理:按照天体运行规律,太阳的运行轨迹可以通过视日运行轨迹公式近似计算出来。根据当地的经纬度、日期和时间,编写视日运行轨迹算法程序,计算出当前的太阳高度角和方位角的理论值。根据理论值,算出跟踪机构俯仰轴和方位轴转动的角度,实现对太阳全方位的跟踪。该方法控制简单方便,不受多云、阴天及外部环境的影响,可靠性强。缺点是利用天文计算公式计算出来的太阳角度会有累积误差,运行过程中无法自身消除,需要人为校正[5]。
3.2 爬山法跟踪
爬山法跟踪的原理:随着太阳位置的不断变化,光伏板接收到的太阳能也会发生变化,将引起光伏板输出电压发生改变,但任意时刻,光伏板都有一个最高电压输出位置。通过在高度角和方位角上不断转动光伏板,读取和比较光伏板的输出电压值,当读取到的电压值在高度角和方位角上分别大于其左右邻近的电压值时,此时光伏板基本与太阳入射光线垂直,停止跟踪。爬山法跟踪能够消除视日运行轨迹跟踪带来的累积误差。缺点是当出现多云,太阳光线强度在短时间内变化较大时,可能引起执行机构的误操作,从而影响跟踪精度。
3.3 视日运行轨迹与爬山法互补跟踪
跟踪装置工作后,首先实行视日运行轨迹跟踪方式跟踪太阳。通过检测光伏板输出电压值的大小判断跟踪装置是否进入爬山法跟踪。判断方法为输出电压与设定阈值相比较,如果大于阈值,则为晴天,进行爬山法跟踪,如果小于阈值,则为阴天,放弃此次的爬山法跟踪。跟踪系统在两种模式间自动切换。此种跟踪方式不仅受外界环境影响小,而且能自身修正累积误差,从而保证跟踪控制系统的跟踪精度。
3.4 视日运行轨迹跟踪角度计算
根据天体运行规律,太阳的运行轨迹可以由视日运行轨迹算法计算出来,通过计算太阳每时每刻的高度角和方位角跟踪太阳位置。
太阳高度角的计算:高度角为入射光线与其在地平面上投影线之间的夹角。高度角与纬度、赤纬角及时角之间的关系如下:
sinh=sinφsinδ+cosφcsoδcosω
(1)
注:角度的计量单位均为度。
太阳方位角的计算:方位角为入射光线在地平面上的投影与正南方向的夹角。以正南方为起点,往西为正,往东为负。它与赤纬角、高度角、纬度及时角的关系如下:
(2)
式中:h—太阳高度角;γ—太阳方位角;δ—太阳赤纬角;ω—太阳时角;φ—当地纬度。
由以上公式可知,太阳赤纬角、太阳时角的估算与太阳位置的计算密切相关,其估算精度直接影响太阳位置的计算精度。
太阳赤纬角的计算:太阳光线与地球赤道面的夹角称为赤纬角。Cooper在1969年提出以下公式作为太阳赤纬角δ的近似计算方程[6]:
(3)
式中n为积日,即为1年中的天数,如1月1日n=1,12月31日,平年时n=365,闰年时n=366。
太阳时角的计算:时角ω的大小由太阳时圈与正南方向之间的夹角确定。时角ω大小与当地时间相关。地球一天24 h自转360°,1 h的自转角为15°。规定当地正午时的时角为0,上午为负,下午为正。表示如下:
ω=(t-12)×15°
(4)
其中t为当地时间。通过以上公式,就能较精确地计算出任意时刻太阳的高度角和方位角,同时由控制器发出控制指令跟踪太阳高度角和方位角。
4 跟踪装置的软件设计
4.1 系统跟踪主程序设计
控制主程序流程如图3所示。

图3 主程序流程Fig.3 The main program
主程序开始后,主控制芯片获取当前时间判断是日出前还是日出后,如果是日出前,系统等待一段时间后再次判断;如果是日出后,则进入视日运行轨迹跟踪。通过角度公式计算当前的太阳高度角与方位角。主控制器获取当前的太阳角度后,计算电机与电动推杆应该转动的角度,跟踪太阳方位角与高度角。视日运行轨迹跟踪子程序完成后,根据当前的天气状况,判断是否进入爬山法跟踪。判断方法如下,检测光伏板的输出电压,如果输出电压大于设定阈值,则为晴天,进入爬山法跟踪子程序。如果光伏板输出电压小于设定阈值,则为阴天,放弃此次爬山法跟踪。延时结束后要判断当前时间是否在日出前日落后,若不是则进入下一次循环,若是则跳出循环,并驱动跟踪机构回到起始位置后电动推杆停止工作。
4.2 视日运行跟踪子程序
视日运行轨迹跟踪子程序流程如图4所示。程序运行后,主控制器通过当地的时间以及经纬度信息,计算出当前太阳高度角和方位角。并与上一时刻的角度作差,得到延时时间内太阳高度角与方位角的变化差值,根据此差值,计算电动推杆与步进电机在该时间段内应该转动的步数,完成对太阳位置的跟踪。一天内,上午高度角一直增大,下午减小;电动推杆在上午时向上推升,下午时向下收缩,跟踪太阳高度角。方位角日出后一直在增大,则步进电机始终向西正转,跟踪太阳方位角。只有当日落后,系统需要返回起始位置时才反转。当电动推杆与步进电机转动到位后,结束本次跟踪。
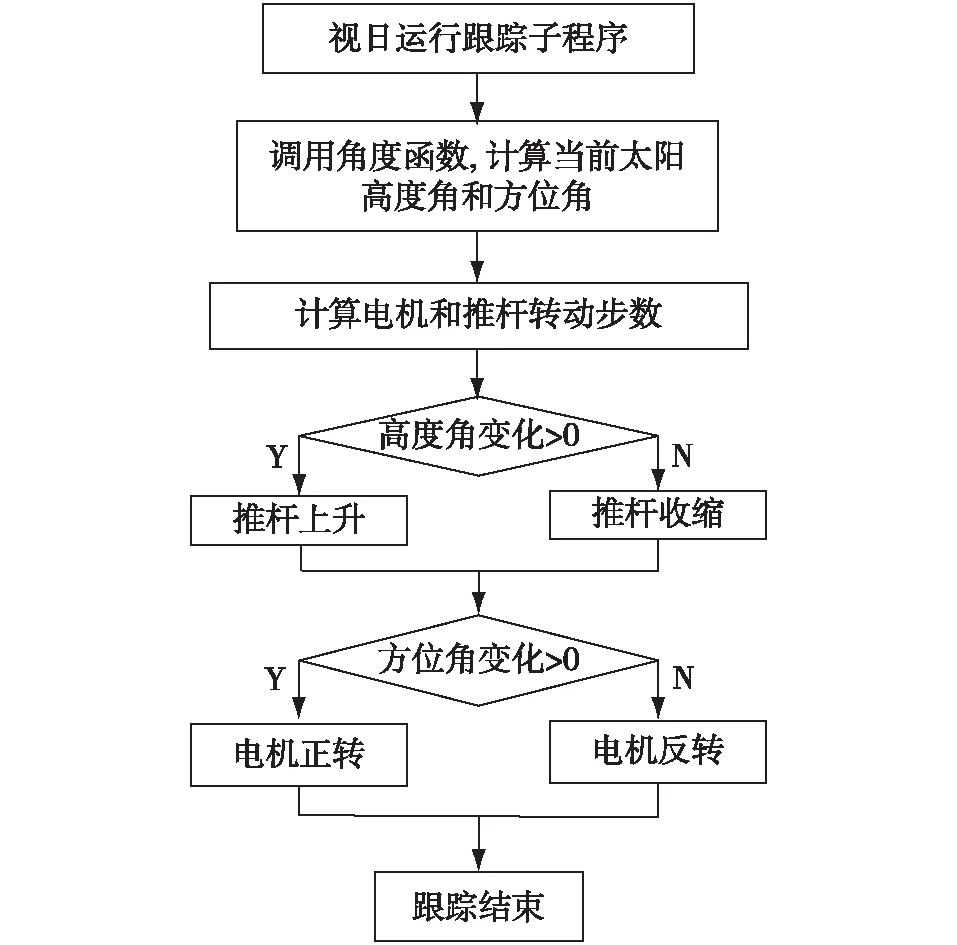
图4 视日运行轨迹跟踪子程序Fig.4 The subprograms of the day trajectory tracking
4.3 爬山法跟踪子程序
程序流程如图5所示,当读取到的光伏板输出电压值大于设定阈值时,进行爬山法跟踪,保存读取到的电压值,推杆推动光伏板上升一定角度后,读取当前电压值并与上升前保存的电压值进行比较,如果大于上升前电压值,则光伏板继续上升,否则推杆推动光伏板下降一定角度。当光伏板下降一定角度后,读取当前电压值与下降前电压值进行比较,如果大于下降前电压值,则光伏板继续下降,否则电机正转。通过不断调整推杆、比较电压值,完成太阳高度角跟踪,方位角跟踪原理同上。
5 实验测试
用2块参数相同的太阳能光伏板同时进行实验测试,其结构参数如表1所示。

表1 太阳能电池板结构参数Table 1 The structure parameters of solar panel

图6 跟踪式与固定式输出功率对比曲线Fig.6 The contrast curves of output power for tracking mode and stationary mode
其中一块固定于跟踪控制系统上,另一块调至当地最佳倾角[7]。采集2块太阳能光伏板在2013年8月20日那一天的瞬时输出功率,其对比曲线如图6所示。
由输出功率曲线可以看出:采用跟踪后比固定式安装的输出功率明显增加,经计算约提高31%。当然跟踪平台执行机构的精度对实验结果有影响,若执行机构的精度得到提高,将会得到更理想的结果。
6 结 语
该系统的旋转机构设有两根轴,能在两个方向上对太阳进行跟踪,且结构设计简单,安装方便。控制方式采取视日运行轨迹跟踪为主,爬山法跟踪为辅的跟踪方法,将两种跟踪方法的优点结合到一起,实现了对太阳的高精度跟踪。经检测,该系统运行可靠,稳定,有很高的性价比,便于在太阳能跟踪装置中推广和使用。
[1] Snyder G J.Application of the Compatibility Factor to the Design of Segmented and Cascaded Thermoelectric Generators[J].Appl Phys Lett,2004,84(5):2436-2438
[2] Konar A,Mandal A K.Microprocessor Based Automatic Sun Tracker[J].IEE ProcPart A-Phys SciMeas Instrum Manage EducRevf,1991,138(4):237-241
[3] Garcia-martin F J,Berenguel M,Valverde Letal.Heuristic Knowledge-based Heliostat Field Control for the Optimization of the Temperature Distribution in a Volumetric Receiver[J].Solar Energy,1999,66(5):355-369
[4] 建英,吕文华,贺晓雷,等.一种智能型全自动太阳跟踪装置的机械设计[J].太阳能学报,2003,24(4):330-333
[5] 陈维,李戬洪.太阳能利用中的跟踪控制方式的研究[J].能源工程,2003(3):18-21
[6] Cooper P I.The Absorption of Radiate-on in Solar Stills [J].Solar Energy,1969,12(3):333-346
[7] 杨金焕.固定式光伏方阵最佳倾角的分析[J].太阳能学报,1992,13(1):86-92
