基于“北斗”定位的卫星电视天线对星装置设计
2014-03-14牛全营张文义
牛全营,张文义
(焦作师范高等专科学校 理工学院,河南 焦作 454000)
0 引言
卫星电视地面天线对星的做法一般有两种方式,一种是包含有伺服系统和伺服马达等可构成卫星天线自动对星系统.这种系统对星效果好,设备复杂,价格较贵;另一种是人工操作系统,主要用于固定位置.如果是自驾车野外探险,野外经常换地方收看卫星电视节目,由于不熟悉环境,利用这种方式对星则时间长,效率低下.
基于“北斗”定位的卫星电视天线对星装置是一种手动加设备提示的简易半自动对星系统,目前市场上还没用这样的装置.它的工作原理是:使用“北斗”的定位功能获取本地的经纬度,使用运动感应和地磁感应传感器获取本地方位数据,单片机根据以上数据以及存储好的卫星电视的卫星参数进行计算,获得卫星天线应该对应的方位角、仰角以及当前天线状态应该调整的角度数据,并显示在液晶显示屏上.天线操作人员根据显示屏反馈的当前天线姿态提示信息进行反复粗调、微调,直到液晶显示模块上指示的角度差值(解算出的卫星天线理论角度值与实际卫星天线角度值的差值)小于0.2°,卫星天线即可准确接收到卫星信号[1].另外,由于极化角对接收效果的影响较位置角(方位角、仰角)的影响小,装置不涉及对极化角调整计算显示,实际中利用手动调整即可.此装置体积小、重量轻、显示直观、价格低廉,作为便携式对星设备使用很方便.
1 装置组成
装置主要由STM32F103单片机[2]、SIM68VB北斗定位模块[3]、LSM303DLHC运动感应和地磁感应传感器[4]、LCD-12864液晶显示屏[5]和选星键盘5部分组成,如图1所示.
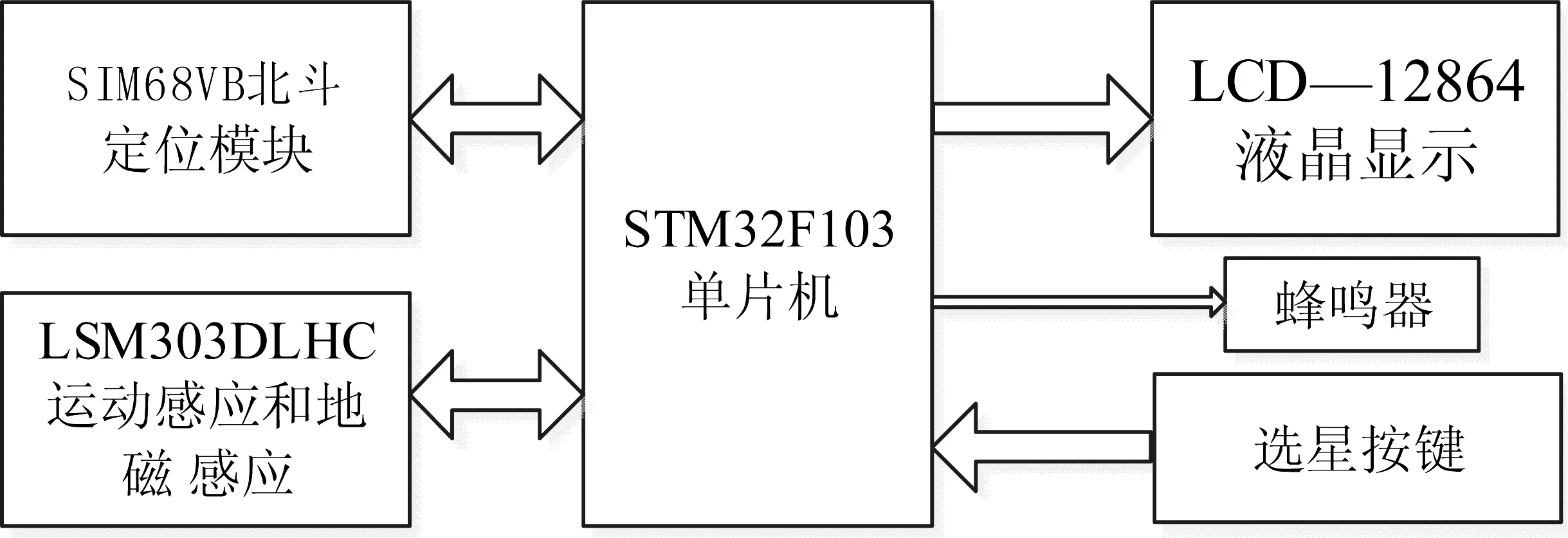
图1 装置组成图
STM32F103C8是拥有Cortex-m3内核的32位微处理器.微控器工作在72MHZ的系统频率上.接口丰富,运算速度快.
SIM68VB是支持北斗定位的双模模块,同时支持GPS定位系统,具有低灵敏度(-167dBm),低功耗(捕获33mA,追踪23mA)的特点,支持QZSS系统,SBAS系统(WAAS, EGNOS, GAGAN, MSAS),DGPS系统(RTCM)和辅助定位系统A-GPS.定位精度高,定位速度快.
LSM303DLHC集成三轴磁力计和三轴加速计,采用数字接口.磁力计的测量范围从1.3 Gauss到8.1 Gauss共分7档.它的分辨率可以达到8 mGauss.LSM303DLHC还集成一颗高性能的加速计.加速计同样采用12位ADC,测量精度达到1mg.运动感应和地磁感应传感器水平固定在天线的转动部分,通过屏蔽线和单片机相连.
2 电路原理图
如图2是卫星电视接收天线快速对星设备原理图.IC1是+3.3v稳压电源AS1117芯片,IC2是运动感应和地磁感应传感器LSM303DLHC芯片,IC3是单片机STM32F103C8、IC4是存储常用电视卫星数据AT24C01芯片,IC5是北斗定位SIM68VB模块,IC6是液晶显示屏LCD12864,LS1是按键操作提示蜂鸣器,SW-SPDP是单片机启动模式选择开关.通过SW-SPDP可以下载程序或从内部FLASH运行程序. S3~S7这4个按钮实现对EEPROM存储的卫星选择. SW-DPDT是串口下载转换开关.
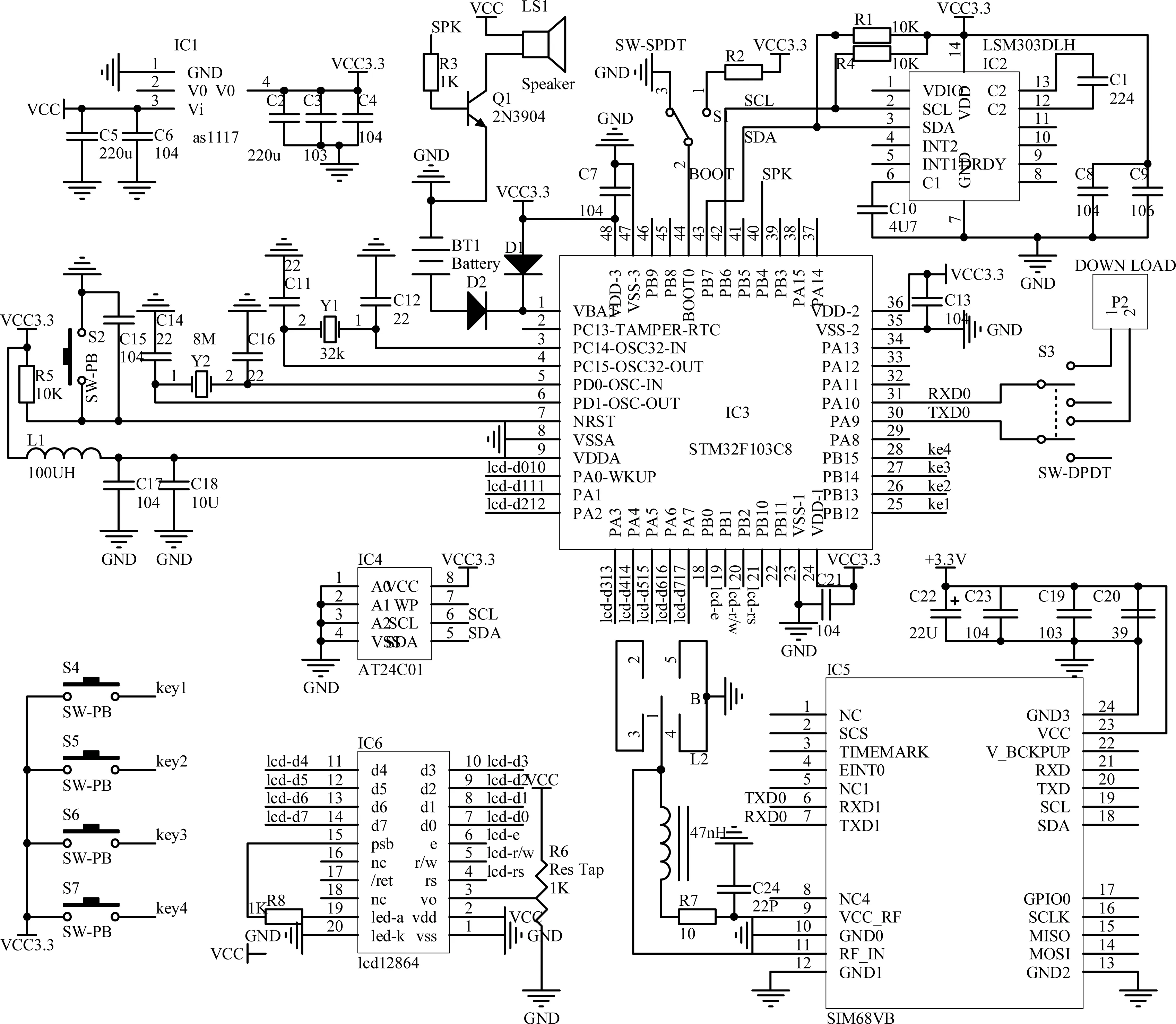
图2卫星电视接收天线快速对星设备原理图
单片机STM32F103C8通过IIC总线和LSM303 DLHC、AT24C01连接,事先将国内接收电视卫星的数据(经度、名称)写入系统的EPROM中[6],通过串口和SIM68VB连接,通过并口和LCD12864连接.稳压电源AS1117为装置提供+3.3V电源.按钮选择收看的卫星数据显示到液晶显示屏上,同时单片机计算出的数据也显示其上.
3 软件设计
软件是由系统初始化模块、北斗定位采集模块、运动感应和磁感应传感器采集模块、计算模块和显示模块组成.主要功能是存储常用电视卫星经度、名称信息到系统EPROM;采集北斗定位模块的地理经纬度数据;采集固定在接收天线上运动感应和磁感应传感器的水平、垂直方向的角度以及磁偏角数据;计算天线对星的位置角;在人工调整天线时,计算当前天线位置角和对星位置角的偏差;在液晶显示屏上显示对星位置角和偏差值.软件流程如图3所示.
初始化过程如下:对STM32F103单片机时钟、定时器、LCD-12864液晶显示屏、串口、I2C端口、键盘端口、蜂鸣器端口配置;将常用电视卫星的经度存储在EPROM中;单片机通过串口初始化SIM68VB定位模块并检测其是否正常;单片机通过I2C端口初始化LSM303DLHC运动感应和地磁感应传感器并检测其是否正常;液晶显示屏显示初始化成功(失败)信息,并通过蜂鸣器发出提示信息.初始化成功后,系统等待键盘输入选择卫星,当用户选择后,读取EPROM中存储的对应卫星数据,将卫星名称显示在液晶显示屏上.单片机通过串口接收SIM68VB定位模块发来的地理经纬度数据,并通过I2C端口获得LSM303DLHC运动感应和地磁感应传感器的天线水平、垂直角度和磁偏角数据.单片机通过对卫星经度、天线经度、纬度数据进行计算获得天线理论上的位置角数据,然后和当前天线水平(经过磁偏角修正的方向)、垂直角度进行比较获得角度差值,显示在液晶显示屏上,提示用户手动调整方向.手动调整、计算差值、显示差值进行循环调整,最后得到所需精度,完成天线对星调整过程.
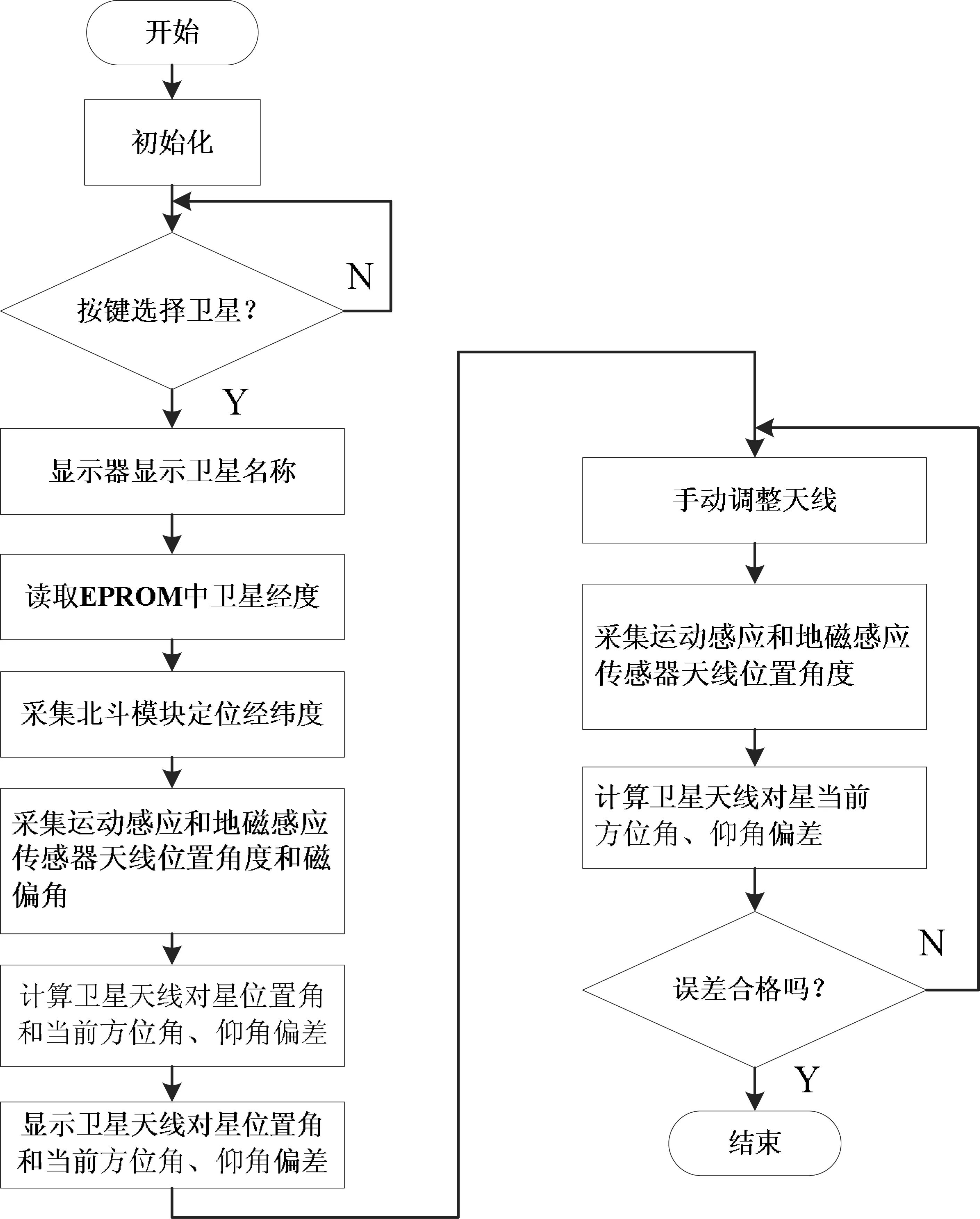
图3 软件流程图
仰角和方位角的计算方法:卫星接收天线指向位置包括方位角和俯仰角,合称为位置角.仰角为自接收点P看赤道上空的卫星的直线与接收点所在水平面的夹角,天线俯仰角θ则与地球半径R、卫星高度H及P与S对地心的张角β有关,当R=R0=6378Km,H=35786Km时,其关系可简化为[7]:
(3-6)
从接收点看位于赤道上空的卫星的方位角度是地面天线的方位角,方位角φ也是地理位置的经度λ和纬度φ的函数,它们的关系为:
cotφ=sinφcotλ
(3-7)
即:
φ=arctan(tanλ/sinφ)
(3-8)
4 结束语
利用SIM68VB北斗定位模块所设计的卫星电视接收天线快速对星装置,去掉了复杂的自动跟踪及伺服控制系统,利用“北斗”定位功能,结合电视卫星的空间参数和磁偏角数据计算出调节数据,通过显示参数,手动对星,实现了价格低廉、简单、快捷、快速对星功能.此对星设备可以广泛应用于牧区、旅游、野外工作的卫星电视接收用户,特别是流动性大的工作人员(牧区)更加适合,具有一定市场需求.
[参考文献]
[1] 王永军,彭涛,马银圣.卫星天线的单片机快速对星系统[J].全球定位系统,2008(6):21-24.
[2] 陈志旺.STM32嵌入式微控制器快速上手[M].电子工业出版社,2012:92-198.
[3] 芯讯通无线科技有限公司.SIM68VB_北斗导航模块硬件设计手册_V1.00 [DB/OL].[2014-09-19].http://www.doc88.com/p-8899037160859.html.
[4] STMicroelectronics.LSM303DLHC Datasheet[DB/OL].[2014-09-19].http://www.st.com/st-web-ui/static/active/cn/resource/technical/document/datasheet/DM00027543.pdf.
[5] 基于51单片机的12864液晶图文显示研究[J].设计研究,2010(36):139-140.
[6] 黄智伟,王兵,朱卫华. ARM微处理器应用设计与实践[M].北京:北京航空航天大学,2012: 355-408.
[7] 张振全,伍文平,徐燕红,李静.用单片机实现便携式卫星设备的快速对星[J].单片机与嵌入式系统应用,2007(1):74-75.
