飞机电磁弹射系统发展及其关键技术
2014-03-11李小民李会来向红军李治源
李小民,李会来,向红军,李治源
(1.军械工程学院无人机工程系,河北石家庄050003;2.军械工程学院弹药工程系,河北石家庄050003)
利用电磁力实现飞机推进与制动的新型弹射装置具有小体积、高效率、高可靠性、低维护成本、宽使用范围等诸多优势,能高精度、全程可控地弹射从小型无人机到战斗机的大部分机种[1-2]。直线电机作为电磁弹射器的执行机构,其主要应用范围是大载荷的短程加速,在军事上比较典型的应用是在航空母舰上舰载飞机的起飞弹射。设计和研发高性能的弹射用直线电机已成为国内外学者和机构对电磁弹射器研究工作的热点。本文对飞机电磁弹射系统(ElectroMagnetic Aircraft Launch System,EMALS)的发展现状、研究内容和电磁弹射用直线电机的关键技术进行了研究,并对其发展前景和应用进行了展望。
1 飞机电磁弹射系统发展现状
1.1 美国飞机电磁弹射系统研究现状
从20世纪40年代起,世界军事发达国家已认识到电磁弹射技术的优势和发展潜力,投入了大量的人力、物力和财力进行飞行器电磁弹射技术的研究工作,并在各自的技术侧重点上取得了明显实效。其中,美国对舰载机电磁弹射技术的研究最早,也最为成熟,其主要侧重于大载荷的舰载机电磁弹射器工程化研制。由于受限于大功率脉冲电源技术,英法等国家的研究侧重于相对小载荷的无人机电磁弹射器,当前技术瓶颈也集中在大功率的高频开关脉冲功率技术和补偿式脉冲交流发电机技术上。
美国海军于20世纪40年代首先提出了将电磁弹射技术应用于飞机起飞,当时美国威斯汀豪斯电气公司曾用一个称作电拖(Electopult)的装置做全尺寸飞机的弹射试验。然而,由于该系统运行成本较高,且与当时主流的液压弹射器相比存在较大差距,因此二战结束后美军就放弃了对该系统的研究工作。1981年,美军重新开始对EMALS进行可行性研究,论证其是否能在航空母舰上进行电磁弹射飞机起飞。1988年,美国海军EMALS研究小组(卡曼电磁系统公司)制造了12英尺的小比例电磁弹射系统演示器并进行了测试试验,其静态推力可达到500 kN以上,电磁辐射也能够被屏蔽在弹射用直线电机的槽型结构内。而后,美国海军空战中心确定了航空母舰舰载机电磁弹射器模型的主要指标:在3 s内,将重达36 t的全载F-14战机加速到150节[3-4]。1995年,美国海军空战中心的 M.R.Doyle等人[5]提出了一种EMALS设计方案,如图1所示。该方案采用无槽型直线永磁同步电机、圆盘式交流发电机和频率变换器共同构成弹射系统。

图1 美海军空战中心EMALS设计方案
20世纪90年代后期,美国在论证未来航空母舰的过程中,正式将EMALS摆上了议事日程,并于1999年完成概念探讨和定义工作后,通过招标确定由诺斯罗普·格鲁曼公司(Northrop Grumman Gorp,NGG)和通用原子公司(General Atomics,GA)分别开展计划定义和风险降低阶段的研究,旨在开发一个全尺寸、全集成的 EMALS原型样机[4,6-7]。2004年,完成了2种EMALS方案试验验证后,美国海军空战中心选择了GA的设计方案进入工程制造研制阶段,其EMALS设计方案如图2所示。

图2 GA的EMALS设计方案
2008年4月,GA公司EMALS研究团队成功通过了储能60 MJ、功率60 MW的电动机/飞轮发电机的工厂验收测试,这标志着EMALS最后一个技术障碍被扫清[6-7]。2009年7月,GA-EMS公司完成了EMALS发电和动力设备装置的高频循环测试(HCT-Ⅱ);而后,开始进行EMALS模拟弹射试验和全功率演示验证试验工作。图3是GA研制的EMALS关键的储能部件——惯性储能发电机[7]。

图3 GA研制的惯性储能发电机
从2010年1月起,EMALS的研究工作正式进入到全尺寸试弹射综合试验阶段。试验初期,由于软件问题,曾致使直线电机电枢和甲板张紧器造成不可修复的损伤。但是,问题很快得到了解决,2010年3月重新开始试验,经过多次弹射后的试验小车末速可达180节,达到了EMALS对弹射末速的最高要求[7-8]。2010年12月,EMALS首次成功地将F/A-18E“大黄蜂”战斗攻击机弹射起飞,研究工作获得了里程碑意义;随后,EMALS又多次完成了对T-45C“苍鹰”教练机、C-2A“灰狗”运输机等其他机型的弹射起飞。2011年9月,美军新泽西州海军基地一架E-2D“鹰眼”预警机首次从全尺寸模型航母甲板上设置的电磁弹射器上弹射起飞,此次试验标志着电磁弹射器应用于航母已完全进入工程化改进调试阶段。到目前为止,美国在EMALS上花费了30余年的时间和40亿美元的经费,预计其将在2015年服役的CVN-78航母上正式使用。从全尺寸弹射综合试验的效果和改进调试的进度来看,工程研制和计划进度表很吻合,按时间表成功投入使用的可能性非常大。
1.2 英法电磁弹射系统研究现状
英国飞机电磁弹射系统简称为EMCAT(ElectroMagnetic CATapult),其计划作为英海军新一代航母(CVF-1,CVF-2)的电磁弹射器。2001年,英国便已启动了“电磁动力综合集成技术”(ElectroMagnetic Kinetic Integration Technology,EMKIT)的研发计划;2005年,开始进行样机研制;2006年12月,在莱斯特谢尔郡的试验场完成了EMKIT系统首次试运行;2007年2月,EMKIT成功进行了在特定弹射速度下的试验,7月开始进行满负载试验。EMKIT样机是一种低电压系统,采用直线感应电机,安装在沿着15 m长的轨道布置的模块化设备中,轨道与静态转换开关相连,如图4所示。EMKIT系统计划用于从海上平台上弹射无人机,要求实现的技术指标为:弹射飞机质量小于500 kg;弹射末速度约为50 m/s;每小时可完成5次弹射;最大加速度为10g。

图4 英国研制的EMKIT试验样机
英国科孚德公司的EMCAT系统在技术和性能上接近于美国GA公司的EMALS。但EMCAT系统采用了开路控制方式,可消除对速度反馈传感器的依赖,不需要在轨道上安装传感器;另外,它还能针对大多数故障自行调整和修正,在单个直线感应电动机失灵、飞机喷气动力不足、飞机质量设置错误以及缺少飞机喷气推力数值时能够正常弹射。由于避免了大量传感器的使用和安装工作,EMCAT系统在成本和保养方面更具优势,系统的可用性更好,控制更简单。与EMKIT系统使用690 V的低电压不同,EMCAT系统工作在3 kV的高电压环境下,尺寸也远大于EMKIT系统。EMCAT系统弹射有人驾驶飞机时的加速度为3.5g,弹射能量将达到60~80 MJ,最高可将30 t的飞机加速至78 m/s。
法-德圣路易斯研究所(Institute of Saint Louis,ISL)曾提出了一种能弹射数百千克无人机的电磁弹射器设计方案[9]。它采用了长初级结构的永磁同步直线电机,集中整距三相定子绕组。其技术指标为:弹射无人机质量350 kg;弹射末速度50 m/s;导轨长度14 m;发射仰角30°;平均加速度89.3 m/s2;推力 33.015 kN。
2 电磁弹射用直线电机关键技术研究现状
在大载荷、低初速的飞机电磁弹射情况下,必然要求弹射器的本体(即直线电机)具有很高的效率和推力/体积比,这样才能满足弹射器的性能指标。电磁弹射器不仅要求直线电机的输出推力足够大,还要求推力波动尽可能小,以防止对飞机及机载设备产生冲击和过应力。直线电机作为电磁弹射器的执行机构,其推力性能提升和推力波动抑制是重要研究内容,其关键技术就在于电机本体的优化设计和高性能的控制方法。
2.1 直线电机选型方案
电磁弹射器的直线电机选型主要有永磁直线电机(Permanent Magnet Linear Motor,PMLM)、直线感应电机(Linear Induction Motor,LIM)和直线磁阻电机(Linear Reluctance Motor,LRM)3类。对于LIM,由于其采用注入电流励磁,使得绕组能够加载大电流,故LIM的推力输出往往大于永磁类直线电机,其通常适用于大载荷舰载机电磁弹射器设计中;与感应类电机相比,PMLM的能量转换效率相对较高,更适用于质量较小的无人机电磁弹射器方案设计,其工作原理如图5所示。根据PMLM的初级、次级结构类型的不同,其又分为动磁型和动圈型2种结构,通常动圈型直线电机易受拖线结构的限制,动磁型直线电机往往更适于大推力、高速度的电磁弹射应用[10]。
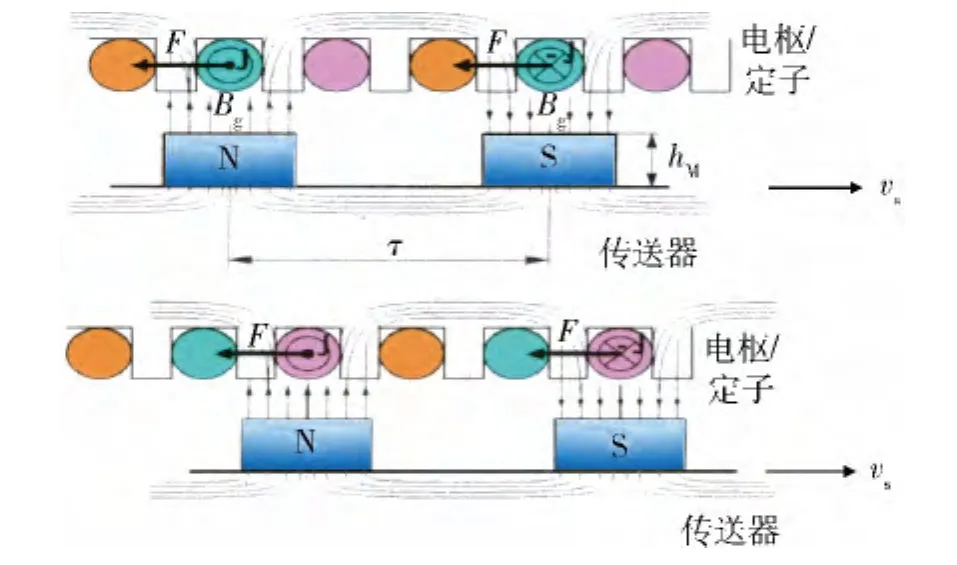
图5 PMLM工作原理
对于基于LRM的电磁弹射器设计方案,其控制方法较为简单,但是消除较大的齿槽定位力和磁饱和问题是限制其动子末速度输出的主要因素[11]。基于齿槽结构的永磁直线电机的电磁弹射器方案,为消除永磁体磁饱和限制并防止绕组大电流造成永磁体退磁,有限元计算结果显示使用永磁体厚度要达到100 mm,这就限制了其工程化设计应用[9]。考虑到直线电机的恒推力输出控制问题,采用不均匀分段法设计的电机应用于电磁弹射器,使得从设计阶段就考虑了推力波动的抑制问题[12]。但这种结构设计方案会在分段过渡接缝时产生定位力的波动,需要进一步消除。
2.2 直线电机电磁-推力性能优化方法
2.2.1 弹射用直线电机电磁-动态性能分析
直线电机电磁性能的研究主要借助于有限元分析,通过对直线电机弹射过程的动态模拟来研究电磁场分布、电磁-温度参数等对推力输出和动子加速性能的影响。通过仿真计算,为弹射器的工程设计提供相应的基础数据和理论依据。
寇宝泉等[13]研究了一种电磁弹射用永磁直线同步电机(Permanent Magnet Linear Synchronous Motor,PMLSM)的瞬态电磁-温度场特性,并对直线电机的电磁-动态性能特性计算结果在样机上进行了试验验证,仿真模型和电磁场分布云图如图6所示。
罗宏浩等[14]对一种电磁弹射用PMLM在不同电流驱动模式下的动态发射特性进行了研究,并结合理论分析与有限元仿真对电机参数进行了优化设计,其有限元动态运行特性结果令人满意。笔者对一种适用于几十千克小载荷无人机的动磁型LPMBLDCM电磁弹射器的电磁-推力特性进行了研究,仿真模型和电磁场分布云图如图7所示,利用有限元计算得到了电磁特性、电路特性和加速特性的仿真结果,仿真数据和样机测量数据相对一致。
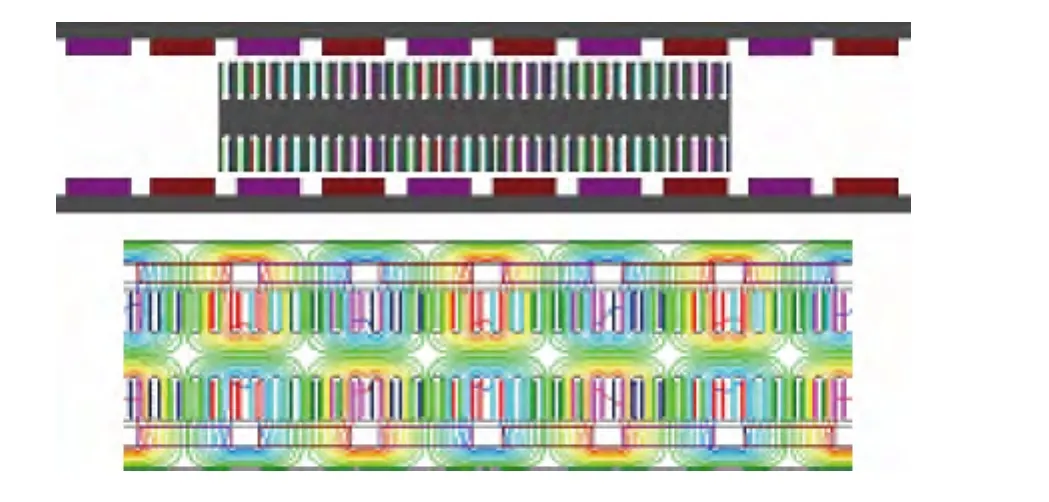
图6 PMLSM的仿真模型和电磁场分布云图

图7 LPMBLDCM的仿真模型和电磁场分布云图
2.2.2 直线电机推力性能提升方法
直线电机推力性能提升方法包括推力输出性能提升和恒推力输出控制2方面。总体上可分为2类:1)通过优化设计电机结构来抑制齿槽力和优化反电动势波形,进而达到提升推力输出和抑制推力波动的目的;2)设计适当的控制策略,对电机输出的不良特性加以改进,使得电机输出推力更加平稳。
1)直线电机结构优化设计
在电机结构优化设计方面,相关研究内容主要集中在对电机内部电磁场进行分析和计算,研究推力输出下降和推力波动的原因,并据此优化调整电机的最佳结构参数,在提高电机输出推力的同时尽可能减少其推力波动。电机结构优化主要是通过对斜槽、绕组结构、磁极、铁心等方面进行设计,来优化电机输出性能[15-18]。另外,通过特殊的结构安排和机械设计仍可以达到减小电机齿槽力和推力波动的目的[19]。值得注意的是,通过优化结构参数提升电机输出性能时,会引起因某些参数的改变而影响电机其他性能的问题,所以必须全面考虑。其他非目标优化参数不能随意调整,改变其他参数后必须重新计算,因而单一目标参数优化设计使用范围有限,进而引出了电机的多目标优化设计问题[20]。
另外,在高速情况下,永磁电机会产生很高的涡流损耗和磁滞损耗,进而造成电机推力/转矩输出的下降[19,21-22]。电机高速工况下对电机性能带来的影响主要体现在涡流阻力和磁场检测2方面。相关研究[21]指出:高速时的损耗模型不能通过传统的解析估算,而必须通过数值计算才能得到正确的结论。在电机高速工况下,由于动磁体高速运动引起的反电势磁场和涡流磁场会干扰电机磁场的检测,从而导致基于磁场检测的电机换相控制问题也被众多学者[23-24]广泛研究。在电机设计中,可以在材料选择、铁耗计算、磁路结构等方面采取适当措施,以提升推力输出性能,还应将电磁场、热场和机械结构进行综合分析,并且考虑电机高速工况下电感参数对控制系统的影响,最后得出合理的设计方案。
2)直线电机推力控制方法
直线电机推力控制方法的实质是通过对电机推力特性的研究(实时或者离线),制定相应的控制策略,并根据电压、电流、位置、速度等观测量的变化给出控制量,使电机的输出达到预期目标。它主要包括预定义电流波形控制、状态观测与估计、直接推力/转矩控制、制动性能分析以及变速度条件下的换相推力波动抑制等研究内容。
直线电机推力波动主要来源于3个方面:静态的齿槽定位力、电枢反电动势不规则引起的推力波动和换相控制引起的推力波动[25]。前2种推力波动主要是由电机本身的结构特点和电磁感应所引起的,其主要通过电机结构的优化设计来抑制;对于换相推力波动抑制,一般是通过适当的激励控制策略使得电机输出推力更为平稳。换相推力波动抑制方法是无刷直流电机特有的控制方式引入的,它包括2方面:一是换相时刻非换相电流变化引起的推力波动;二是在电机高速运行工况下,换相控制本身导致电流波形滞后反电势波形所引起的推力下降[23]。电流波形控制方法是通过对电枢反电动势不规则问题的补偿来抑制电机推力/转矩波动的。通过对换相电流预测控制或注入电流谐波成分,来得到满足恒推力要求和约束条件的电流波形统一形式,在反电势非理想波形的条件下实现恒推力控制,这是电流波形控制方法的理论依据。
为了改善推力波动,许多学者[24,26-27]尝试通过建立输入参数与输出推力/转矩的直接代数关系来进行精确控制,其目的仍然是抑制电机推力/转矩波动,实现恒推力/转矩直接控制。由于对转矩/推力及定子磁链直接进行控制,因而涉及到定子参考磁链的观测问题。根据所跟踪定子磁链运动轨迹的不同,电机控制分为直接自控制(Direct Self Control,DSC)和直接转矩控制(Direct Torque Control,DTC)。目前,对参考定子磁链的确定已有一定的研究,但也都存在诸如无用功耗偏高、热损耗增加等问题。为了克服系统容差带来的影响,近年来又有学者将智能控制算法加入到电机直接转矩/推力控制系统中优化其性能,也取得了一定的成果[28-29]。
以上控制方法的有效性依赖于对电机参数的预知程度和对电机状态的检测精度,当电机参数不能准确获知或在电机运行过程中发生变化时,推力控制方法就必须辅以适当的参数估计和状态观测措施,实时校正控制模型,从而克服外部干扰以减小推力波动[30-32]。不过,这些估计和观测方法只对某些特定的参数敏感,而不可能捕捉所有参数的变化,因而很难离开实验室环境;而且这些方法都要求控制系统具有很高的检测精度和运算处理能力,软、硬件成本都很高。直线永磁电机由于受有限长动子边缘磁通的影响,势必会出现磁通变形、反电势变形、相间不平衡和边端力等边端效应,这些现象对电机直接推力控制的影响机理与消除措施也被广泛研究[33-34]。
2.3 储能部件和热量管理技术
对于电磁弹射系统储能部件的选择,要考虑其弹射飞机类型、功率密度、电流波形以及设计要求的每个单元电气参数。图8为EMKIT、EMCAT系统分别弹射各类型飞行器所需的能量。
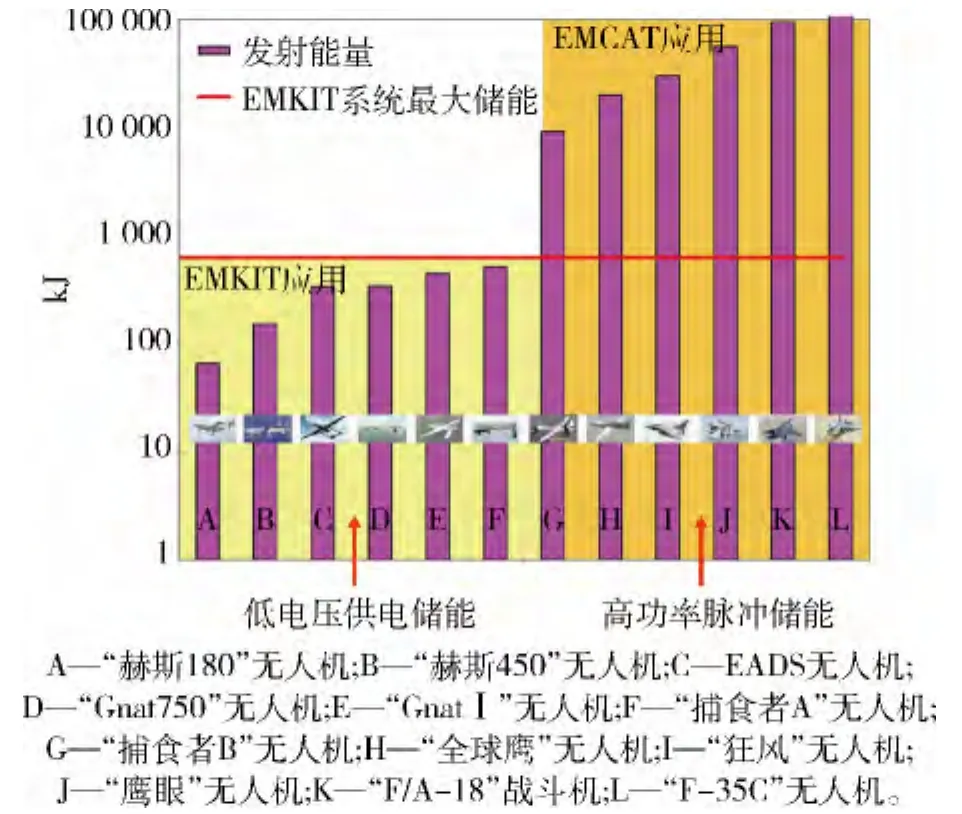
图8 EMKIT、EMCAT系统弹射各类飞行器所需能量
从图8可以看出:在低电压供电模型下,EMKIT系统只能弹射质量小于“捕食者”无人机(1 000 kg)的中小型飞行器;当电磁弹射大载荷的飞行器时,就必须考虑使用其他储能部件,一般选择高压供电储能或飞轮强迫储能装置。在绕组大电流工况下,必须考虑电机推力密度、绕组发热量控制等问题。EMALS预期定子效率为70%,峰值损耗为13.3 MW,如此大的耗损功率,冷却是必要的,其采用去离子水绕组注入冷却方式,冷却水的进口温度为35℃,压力690 kPa,流量为1 363 L/min,经过循环冷却后,可将峰值温升由155℃降至75℃。另外,对于永磁式直线弹射器设计,还要防止电流高温下的永磁体退磁现象。永磁体温升主要由涡流效应引起,其产热温升相对较小,一般采用自然对流方式进行冷却。绕组瞬态温升主要集中在端部,通过增大水流量的水冷却方式对降低短时峰值温升的作用有限,提升水冷却方式的散热能力主要通过加强材料应用和工艺改进上[35]。通过对永磁体支撑套开槽或在两侧增加绝缘层隔离的方法,也能够在一定程度上减小涡流效应,从而抑制永磁体温升[19,36]。
3 研究展望
电磁弹射技术受到重视以来,国内外(以美国为主)的众多研究机构对电磁弹射技术应用于EMALS展开了广泛的研究。对于这一新兴的衍生领域,学者们主要是通过对作为弹射器本体的直线电机进行理论建模和动态仿真以及控制方法的研究。具备高储能密度及快速充放电特性的高功率脉冲电源和精确的循环整流控制系统仍是制约电磁弹射技术的关键因素。
3.1 深化惯性储能和高功率循环逆变系统作用机理,开展弹射器关键组件研究
对于高功率输出的电磁弹射器,补偿式脉冲交流发电机和高功率循环变频器是其最关键、技术难度最大的组件。从设计上看,高功率循环变频器是通过多路桥式电路来获得叠加和控制功率输出的,是完全数字化管理的无电弧电能源变频管理系统。补偿式脉冲交流发电机作为电磁弹射器的储能装置,单个电机在10 s内向外输出几十甚至上百兆焦能量。在如此高功率输出的情况下,储能装置和循环变频器协同工作,既要功率输出平稳可控,又要防止产生高压电弧,这是极其复杂的控制过程。开展大容量惯性储能系统和高功率循环逆变系统组件研制,深化高频高功率脉冲储能的泄放整流作用机理,是大载荷电磁弹射器工程化研制的基础。
3.2 强化系统集成研究,为工程化样机研制提供基础
目前,美国已经完成了EMALS的调试运行试验工作;英国的EMCAT系统也开展了多次的无人机弹射起飞试验,系统调试集成运行成功。研制大功率输出可调节的EMALS工程样机工作,首先需要完成各系统组件研制以及缩比样机的试验研究;综合考量各分系统之间的相互关联性和协调性,使得各部分都能彼此协调工作,达到整体性能最优系统,为了达到此目标,系统集成工作的优劣至关重要。各系统组件集成工作,使得全系统是低成本、高效率、可扩充性和可维护的系统。因此,强化系统集成技术的研究、推动工程化样机的研制必然成为今后研究工作的一个方向。
3.3 加强热管理技术和电磁兼容与高电压安全性研究,为装备发展提供依据
目前,美军对EMALS提出的热能管理和电磁兼容与高压安全的需求,已经开展了专门的适应性试验。试验显示:18 m EMALS缩比样机模型输出效率仅为58%,而50 m 1/2样机模型的效率也仅为63.2%。这证明能量利用率还有不足,热功率也成倍增加。另外,在电磁弹射过程中产生的强磁场环境对机载电子设备影响的抑制也是一项重要内容。美军在2012年进行的EMALS电磁干扰和电磁兼容适应性试验表明:弹射过程中的电磁强脉冲干扰会在一定程度上影响机载电子设备正常工作,采取磁密封条增强磁屏蔽措施后的发射轨道完全能够将局部强磁场降低到正常环境水平。电磁兼容与高电压安全性研究是电磁弹射系统安全评估的一项重要的技术问题,加强开展这方面的研究将有利于建立装备安全的试验评估系统,为装备的发展提供依据。
3.4 拓展应用领域
随着技术的发展,电磁弹射技术应用可拓展到轨道交通牵引、高速车辆碰撞、初级火箭卫星发射等领域。在民用方面,电磁弹射系统作为非黏着型轨道交通牵引系统,可以满足在建筑密集、地形复杂、丘陵地貌地区对轨道交通的特殊要求,实现低噪音、高爬坡等功能。同时,在轨道交通车辆碰撞试验系统、周期性往复高速试验系统中等都可得到广泛应用。另外,超大功率电磁弹射系统可用于卫星的发射,代替初级火箭发射,由于可重复多次利用,维护工作量较少,因此单次发射成本会明显降低。
[1] 李梅武,崔英,薛飞.航母飞机起飞的最佳选择:电磁弹射系统[J].舰船科学技术,2008,30(2):34-37.
[2] 于瀛,池建文,陈昕.电磁飞机弹射系统[J].舰船科学技术,2003,25(4):51-53,56.
[3] Fair H D.Electromagnetic Launch Science and Technology in the United States Enter a New Era[J].IEEE Transactions on Magnetics,2005,41(1):158-164.
[4] 王兵,陈练.美军航母电磁弹射器发展现状[J].现代军事,2009,386(3):44-47.
[5] Doyle M R,Samuel D J,Conway T,et al.Electro-Magnetic Aircraft Launch System:EMALS[J].IEEE Transactions on Magnetics(S0018-9464),1995,31(1):528-533.
[6] 邹本贵,曹延杰.美军电磁线圈发射技术发展综述[J].微电机,2011,44(1):84-89.
[7] 赵宏涛,吴峻,余佩倡.电磁弹射技术发展综述[EB/OL].(2013-01-29)[2014-03-01].http://www.doc88.com/P-739495486305.html
[8] 张晓帆.美国电磁弹射器在遭遇技术故障后恢复建造进度[EB/OL].(2010-05-11)[2014-03-01].http://www.dsti.net/Information/News/58837
[9] Reck B.First Design Study of an Electrical Catapult for Unmanned Air Vehicles in the Several Hundred Kilogram Range[J].IEEE Trans Magn,2003,39(1):310-313.
[10] Patterson D,Monti A,Brice C,et al.Design and Simulation of an Electromagnetic Aircraft Launch System[EB/OL].(2011-09-05) [2014-03-01]. http://wenku. baidu. com/view/311do9fd910ef12d2af9e7a6.html
[11] Huang L,Yu H T,Hu M Q,et al.Study on a Long Primary Flux-switching Permanent Magnet Linear Motor for Electromagnetic Launch Systems[J].IEEE Trans Plasma,2013,41(5):1138-1143.
[12] Patterson D,Monti A.Design and Simulation of a Permanent Magnet Electromagnetic Aircraft Launcher[J].IEEE Trans on Industry Applications,2005,41(2):566-575.
[13] Kou B Q,Huang X Z,Wu H X,et al.Thrust and Thermal Characteristics of Electromagnetic Launcher Based on Permanent Magnet Linear Synchronous Motors[J].IEEE Trans Magn,2009,45(1):358-362.
[14] 罗宏浩,吴峻,常文森.新型电磁弹射器的动态性能仿真[J].系统仿真学报,2006,18(8):2285-2288.
[15] Hwang S,Eom J.Cogging Torque and Acoustic Noise Reduction in Permanent Magnet Motors by Teeth Pairing[J].IEEE Trans Magn,2000,36(5):3144-3146.
[16] Magnussen F,Sadarangani C.Winding Factors and Joule Losses of Permanent Magnet Machines with Concentrated Windings[C]∥International Conference on Electric Machines and Drives.IEEE,2003:333-339.
[17] Inoue M,Sato K.An Approach to a Suitable Stator Length for Minimizing the Detent Force of Permanent Magnet Linear Synchronous Motors[J].IEEE Trans Magn,2000,36(4):1890-1893.
[18] Lee D,Kim G.Design of Thrust Ripple Minimization by Equivalent Magnetizing Current Considering Slot Effect[J].IEEE Trans Magn,2006,42(4):1367-1370.
[19] 赵宏涛,吴峻.金属支撑套对开槽永磁直线电动机推力的影响[J].微特电机,2010,38(2):5-7.
[20] 项昌乐,韩立金,李宏才,等.基于多目标优化的双模式混合驱动电机特性设计[J].北京理工大学学报,2010,30(12):1395-1399.
[21] 刘磊.高速无刷永磁电机的磁场分析[D].合肥:合肥工业大学,2007.
[22] 余莉,胡虔生,易龙芳.高速永磁无刷直流电机铁耗的分析和计算[J].电机与控制应用,2007,34(4):10-14.
[23] 罗宏浩,吴峻,赵宏涛,等.永磁无刷直流电机换相控制研究[J].中国电机工程学报,2008,28(24):108-111.
[24] Safi S,Acarnley P,Jack A.Analysis and Simulation of the Highspeed Torque Performance of Brushless DC Motor Drives[J].IEE Proc Elect Power App,1995,142(3):191-200.
[25] Sebastian T,Gangla V.Analysis of Induced EMF Waveforms and Torque Ripple in a Brushless Permanent Magnet Machine[J].IEEE Trans on Industry Applications,1996,32(1):195-200.
[26] 赵宏涛,吴峻.定子磁链提前换相增加线永磁无刷直流电机的推力[J].中国电机工程学报,2011,31(3):118-122.
[27] Liu Y,Zhu Z Q,Howe D.Commutation-torque-ripple Minimization in Direct-torque-controlled PM Brushless DC Drives[J].IEEE Trans on Industry Applications,2007,43(4):1012-1021.
[28] 代睿,曹龙汉,何俊强,等.基于微粒群算法的无刷直流电机单神经元自适应控制[J].电工技术学报,2011,26(4):57-63.
[29] 陈维,王耀南.基于神经网络的现代感应电机自适应L2鲁棒控制[J].中国电机工程学报,2007,27(15):93-99.
[30] 尚晶,赵荣祥,窦汝振.基于自适应滑模观测器的永磁同步电机无位置传感器控制研究[J].中国电机工程学报,2007,27(3):23-26.
[31] 贾洪平,孙丹,贺益康.基于滑模变结构的永磁同步电机直接转矩控制[J].中国电机工程学报,2006,26(20):135-138.
[32] 郭鸿浩,周波,左广杰,等.无刷直流电机反电势自适应滑模观测[J].中国电机工程学报,2011,31(21):142-148.
[33] 赵宏涛,吴峻.一种消除直线永磁无刷直流电机边端效应对换相时机影响的方法[J].国防科技大学学报,2010,32(4):126-130.
[34] Zhu Y W,Cho Y H.Thrust Ripples Suppression of Permanent Magnet Linear Synchronous Motor[J].IEEE Trans Magn,2007,43(6):2537-2539.
[35] 郭伟,张承宁.车用永磁同步电机的铁耗与瞬态温升分析[J].电机与控制学报,2009,13(1):83-87.
[36] 曲凤波,何天运,陈婷婷.绝缘层对高压永磁同步电动机永磁体温升影响[J].哈尔滨理工大学学报,2011,16(1):75-79.