六自由度平台控制系统分析
2014-03-09晁智强宁初明李欣泽韩寿松陈强
晁智强,宁初明,李欣泽,韩寿松,陈强
(装甲兵工程学院机械工程系,北京 100072)
六自由度平台控制系统分析
晁智强,宁初明,李欣泽,韩寿松,陈强
(装甲兵工程学院机械工程系,北京 100072)
根据六自由度运动平台性能特点,对平台进行了基于位置反解的轨迹规划,并对平台控制系统硬件和软件模块进行了分析,以“PC+PMAC”为结构设计了六自由度平台运动控制系统。采用该控制系统,对平台进行了单缸位置跟踪和轨迹跟踪性能测试试验,试验结果证明了模型的正确性及基于RBF模糊神经网络整定的PID控制的工程可行性和有效性,为今后对液压六自由度运动平台的进一步深入研究提供一个便捷高效的平台。
六自由度;控制系统;运动平台
液压驱动六自由度运动平台具有刚度大、承载能力强、精度高、动态响应快等特点,并能提供精确的直线往复运动。六自由度运动平台可以进行道路模拟试验,再现车辆在实际道路上的振动响应,为试验车辆提供一个非常接近于实际行驶条件的可控制、可重复的振动环境,起到“室内道路”的作用[1-3]。
该六自由度运动平台运用于装甲车辆道路模拟试验,可以提供给操作者真实的瞬时过载动感、重力分量的持续感及部分抖动冲击信息,使运动模拟更逼近真实。试验具有不受天气条件制约、试验周期短、试验结果精度高、重复性和可控性好等优点。文中采用“PC+PMAC”结构设计六自由度运动平台控制系统来进行装甲车辆道路模拟实验,利用该系统强大的运动控制能力,有效改善了六自由度平台的控制性能。
1 轨迹规划
六自由度平台机构由6个并联设置的伺服液压缸驱动,动平台的任何一个自由度的运动均会造成6个液压缸的不同运动,所以六自由度平台机构是一个多变量、强耦合的伺服系统,各伺服液压缸需要协调一致地动作,机构在运动过程中才不至于产生不稳定和破坏现象。对于六自由度平台来说,保持某种姿态或实现某种运动实际上是使六自由度平台的六根伺服液压缸跟踪期望轨迹的控制问题。平台要保持某种姿态或达到什么位置,就必须对其运动轨迹进行规划,因此平台的运动轨迹的规划尤为重要。并联机构的位姿控制和运动轨迹规划问题实质上都是机构的反解问题,即如何控制驱动杆来实现期望的运动轨迹。而并联机构的位置反解简单且唯一,把参数化后的位姿曲线方程代入到位置反解中,得到并联机构驱动杆的运动规律,以此来控制各驱动杆就可以使动平台按照期望轨迹运动,因此利用并联机构的运动位置反解方程来规划上平台所期望的复杂的运动位姿是可行的。位姿控制原理如图1所示。
轨迹规划分为在工作 (任务)空间和驱动 (关节)空间两种,在工作空间规划,路径中有不可达空间以及有多值解问题的影响,除特殊必要外,一般多在驱动空间进行规划。驱动空间轨迹是指动平台的每个自由度在运动过程中每一时刻的位置、速度和加速度。六自由度平台的轨迹规划,通常包含以下3个方面内容:
(1)根据系统的任务要求,对其位姿、运动路径和轨迹进行描述。

图1 六自由度控制系统原理图
(2)根据所确定的轨迹,将上平台中心点的轨迹进行参数化,生成动平台每个自由度在运动过程中每一时刻的位置、速度和加速度实时值。
(3)将上平台中心点的轨迹进行位置反解,得到驱动杆的运动规律,作为各液压缸的控制信号。
(4)将实际测得的各液压缸运动轨迹进行位置正解分析,对上平台的实际控制精度进行分析比较。
基于位置反解的轨迹规划的优点,是可以根据实际的位姿要求,既可以实现单自由度运动,也可以实现多达6个自由度的运动。由于并联机构平台的位置反解算法有精确的解,所以理论上可以实现位姿的精确还原,同时可对上平台的位姿控制精度进行分析比较。
2 平台控制系统设计
2.1 工作原理
六自由度平台控制系统利用基于“PC+Turbo PMAC”结构和LabWindows CVI 8.0开发控制软件,为六自由度运动平台控制系统实现与验证搭建硬件和软件控制平台。利用平台的多自由度的优势,对六自由度运动平台液压控制系统位置跟踪精度、频率响应及平台位姿跟踪精度进行试验研究,并应用六自由度运动平台对正弦路面进行了道路模拟试验。
2.2 硬件模块分析与设计
六自由度运动平台控制平台硬件模块由上位机系统、下位机系统、传感器模块三大部分组成,如图2所示。
上位机系统由一台PC机组成,主要完成非实时控制任务,包括系统初始化、参数设置、轨迹规划、运动参数监控、人机交互、远程通信、数据管理、程序的录入、编辑和存储等功能。
下位机系统由一台开放式多轴运动控制系统控制箱组成,主要进行系统的实时控制,包括插补计算、位置控制、PLC等控制任务,用以完成六自由度伺服回路的闭环控制。控制箱集成了控制平台工作时的主要信息控制模块,分为多轴运动控制卡模块、接口卡模块、伺服放大卡模块和电源模块。
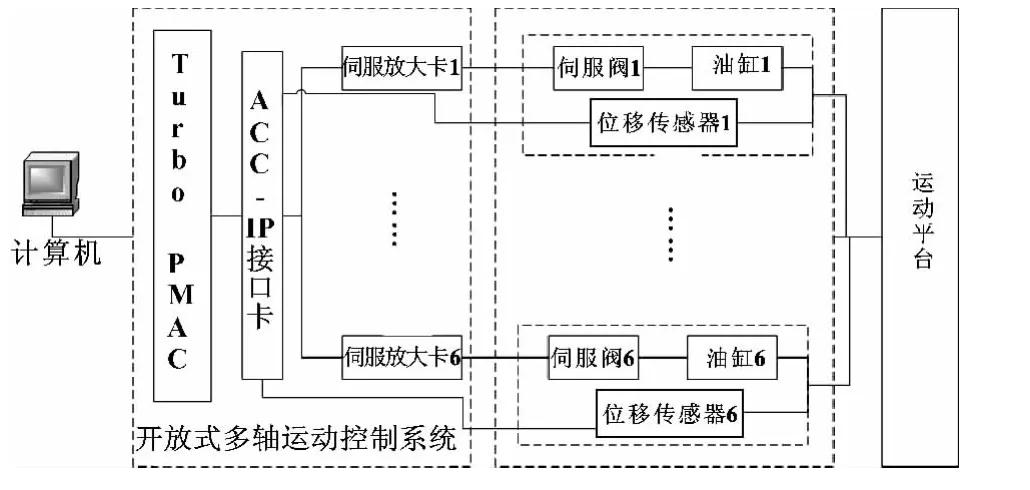
图2 平台控制系统硬件系统
2.3 软件模块分析与设计
六自由度运动平台PC机采用在Windows下多线程编程技术,并基于图形窗口界面,实现运动轨迹规划、运动轨迹显示、控制算法规划、实时通讯、运行状态监控及报警显示、参数设置、系统管理等功能。
PC机上的控制系统软件由LabWindows CVI 8.0开发,根据面向对象的方法设计了7个主要模块,分别为系统管理模块、参数设置模块、轨迹规划模块、算法规划模块、运动控制模块、附加功能模块和帮助模块,软件截图如图3所示。
所有的运动控制、伺服算法、PLC等实时控制功能都由PMAC上的DSP来完成,以保证系统实时性的要求。PMAC上的系统控制软件分为系统管理软件和实时控制软件。
系统管理软件主要包括 PMAC初始化模块和PMAC与PC双CPU通讯模块。通讯模块利用PMAC提供的Pcomm32通讯驱动器,可大大缩短了用户通讯程序及应用程序的开发周期,提高了开发效率。
实时控制软件主要包括位置伺服模块、PLC监控模块。位置伺服模块可以通过设置PMAC内部PID参数实现,也可以用户自定义控制算法。PMAC提供了定制的用户编写的伺服算法的链接,用户必须在主机上使用汇编工具编写算法,再将自己的控制算法下载到板卡中。PLC监控模块用于实时提取运动平台伸缩杆运行状态信号,包括当前的运行方位、运行速度及是否都达到位置限位。

图3 运动轨迹观察界面
3 平台性能试验研究
3.1 单自由度阀控缸系统位置精度实验
由于六自由度运动系统结构的对称性,且各自由度的硬件性能也基本一致,因此可任选一个自由度作为主要分析对象,进行控制策略研究。
图4和5分别为1号油缸在正弦输入信号的幅值为10 mm,频率为1 Hz和4 Hz下,不同控制策略的试验曲线。

图4 频率为1 Hz幅值为10 mm正弦响应试验曲线
曲线1为命令轨迹,曲线2、3、4、5是分别采用PID控制、模糊自适应整定PID控制、RBF神经网络整定的PID控制和RBF模糊神经网络整定的PID控制的实际跟踪轨迹。由图中可看出,模糊自适应整定PID控制和PID控制对1 Hz正弦信号的跟踪效果基本相同,而RBF模糊神经网络整定的PID控制的效果是最好的。对于4 Hz的正弦信号,RBF模糊神经网络整定的PID控制跟踪最快,幅值衰减最小。

图5 频率为4 Hz、幅值为10 mm正弦响应试验曲线
图6为1号油缸的电液位置伺服系统在不同控制策略下的方波响应试验曲线,输入信号幅值10 mm。曲线1为命令轨迹,曲线2、3、4、5分别为采用PID控制、模糊自适应整定PID控制、RBF神经网络整定的PID控制和RBF模糊神经网络整定的PID控制的实际跟踪轨迹。由图可知,RBF模糊神经网络整定的PID控制效果最好,具有较好的方波响应特性,上升时间快,超调量小,其次是RBF神经网络整定的PID控制,其控制效果也明显好于另外两种控制方法。

图6 方波响应试验曲线
从上面的单缸试验结果,可以看出RBF模糊神经网络整定的PID控制策略的综合控制效果要明显好于另外3种控制方法。
六自由度运动平台各单自由度具有相似的动、静态特性是平台系统具有良好控制性能的必要保证。在系统每次启动上升到中位和试验结束回到初始位置的过程中,可以对6个电液位置伺服系统进行比较和调整,从而尽量保证6个位置伺服系统具有相近的运动特性。

图7 平台做升沉运动时6个液压缸同步响应曲线
在相同的输入信号下,平台做升沉运动时6个液压缸的同步响应曲线如图7所示,输入正弦信号幅值10 mm、频率1 Hz时6个伺服液压缸的响应曲线。可以看出,各自由度的运动响应曲线具有很好的一致性。
3.2 平台轨迹跟踪性能实验
当动平台以一定的形式运动时,可求出驱动杆上各个构件的速度和加速度的变化情况。在这一部分中,给定动平台中心点运动,对连杆构件的运动学指标进行仿真。由于空间直线较为简单,这里以具有代表性的螺旋运动为例进行试验研究。
当动平台作螺旋运动时,动平台的轨迹只与其活动半径有关,动平台的速度和加速度只与动平台的轨迹半径以及角速度有关,只需调整动平台的运动角速度或者动平台的线加速度,就可以同时调整动平台的速度和加速度的各个分量。螺旋运动可以测试平台的各种运动学特性,因此试验过程中采用此轨迹作为动平台的运动轨迹。以动平台的几何中心为激励点,其运动轨迹参数化方程如下式所示:

式中:导程S=40 mm,运动周期T=8 s,动平台初始高度Z0=1 460 mm。
把上式所示的圆锥螺旋曲线参数化方程代入位置反解式中,可计算出动平台要实现给定的空间螺旋曲线时各驱动杆应施加的运动规律,6个油缸的伸长量变化曲线如图8所示。

图8 平台做螺旋运动时各缸伸长量变化试验曲线

图9 平台中心点沿X、Y和Z方向的轨迹
由图8可以看到,平台中心点做螺旋运动时,6个油缸伸长量变化的命令轨迹和实际轨迹。由于没有对六自由度空间位姿进行测量的设备,采用将6个油缸的实际运动轨迹数据进行运动学正解的方法求解上平台中心点的实际运动轨迹。上平台中心点沿X、Y和Z方向的运动轨迹如图9所示,上平台中心点的空间运动轨迹如图10所示。

图10 平台做螺旋运动时上平台中心点轨迹
3.3 正弦道路模拟试验
六自由度运动平台主要用于模拟装甲车辆在各种复杂路面上行驶时的实验条件。利用六自由度运动平台可以检测装甲车辆在各种位置姿态下的战技性能指标,进行装甲车辆可靠性、人-机-环等试验研究。本小节利用六自由度运动平台对装甲车辆行驶的典型正弦路面进行了模拟试验[4]。
正弦路面如图11所示,波峰为0.075 m,波峰之间的间隔为20 m。正弦路面可以评估车辆的俯仰特性。

图11 正弦路面地形
假定某型装甲车以10 m/s的速度匀速直线行驶,忽略车轮大小。根据地形及车速信息,可以求得车体的姿态变化。将姿态变化作为六自由度运动平台的输入,可得平台姿态响应曲线、姿态跟踪误差曲线及6个油缸的伸长量变化曲线如图12、图13和图14所示。

图12 平台位姿响应曲线

图13 平台姿态参数跟踪误差曲线

图14 油缸伸长量变化曲线
如图12所示,实线为期望姿态轨迹,虚线为实际姿态轨迹。可以看出,平台可以较好的跟踪给定运动姿态,再现正弦路面状况。由图13可以看出,平台的实际运动姿态与期望姿态有一定的误差,这主要是由平台各部件存在装配间隙及油缸伸长量误差所造成的。
4 结论
基于“PC+PMAC”结构的六自由度平台运动控制系统,解决了传统控制系统开放性、实时性及可靠性不可兼得的矛盾。应用六自由度运动平台,进行了正弦道路模拟试验,并对六自由度运动控制系统上进行的单自由度位置跟踪试验,并通过运动学正解的方法对平台轨迹跟踪性能进行的测试,证明了基于RBF模糊神经网络整定的PID控制的可行性和有效性。
[1]赵慧,张尚盈,韩俊伟.道路模拟振动台的控制策略及关键技术[J].流体传动与控制,2008(2):14-17.
[2]杨云,沈毅力,曹阳,等.道路模拟振动台及其控制系统的研制[J].系统仿真学报,2004,16(5):1044-1046.
[3]FRENCH M.An Introduction to Road Simulation Testing[J].Experimental Techniques,2000,24(3):37-38.
[4]“Clipper”Board Harware Reference Manual[M].Delta Tau,2007.
Analysis of Control System of Six Degree of Freedom Platform
CHAO Zhiqiang,NING Chuming,LI Xinze,HAN Shousong,CHEN Qiang
(Department of Mechanical Engineering,Academy of Armored Forces Engineering,Beijing 100072,China)
According to the performance characteristics of six degree of freedom(6-DOF)motion platform,the trajectory for the platform was planned based on an inverse solution of the position,the overall structure and the control system software and hardware of the platform were analyzed,and with“PC+with PMAC”for the structure,the 6-DOF platform motion control system was designed.The performances of a single cylinder position tracking and trajectory tracking were tested by experiments in using the control system.Test results verify the validity of the model,and the project feasibility and effectiveness of PID control based on RBF fuzzy neural network setting,which provides a convenient and efficient platform for further research of hydraulic 6-DOF motion platform in the future.
Six degrees of freedom;Control system;Motion platform
TP242
A
1001-3881(2014)9-044-5
10.3969/j.issn.1001-3881.2014.09.012
2013-04-26
晁智强 (1967—),男,教授,博士研究生导师,主要从事流体传动和控制方面的研究工作。E-mail: 747850185@qq.com。
