基于PLC与组态软件控制的教学型气动机械手研制
2014-03-06付洪保
付洪保
(唐山学院机电工程系,河北 唐山 063000)
0 引言
气动机械手具有结构简单、污染小、成本低、易于实现直线运动、控制简便、传动快速以及环境适应性强等特点,广泛应用于电子制造、包装印刷、食品加工等领域。它有多个自由度,可用来搬运工件以完成在不同环境中的工作[1]。可编程序控制器(PLC)作为一种工业环境下的计算机控制装置,具有极高的可靠性及应用便利性,得到了迅速普及和高速发展,日益成为机电控制及过程控制的关键部件。目前国内高校机械设计制造及其自动化、测控技术及仪器、机电一体化等专业普遍开设液压与气压传动、可编程控制器、传感器数据处理等课程,传统的实验装置无法满足培养机电一体化综合知识运用能力的教学要求,迫切需要体现行业发展趋势、技术先进的机电一体化实验设备。为此,本文以一种通用的平面关节型搬运机械手为原型,应用工业标准的机械、电气和气动元件,设计了一种基于三菱PLC控制的四自由度教学型气动机械手,并采用组态软件实现上位机控制,能够抓取平面内工件并旋转、上下移动。该实验装置能为以上课程的综合设计性实验服务,培养学生机电一体化知识综合运用能力。
1 总体设计
机械手由摆动气缸、双联气缸、标准气缸和手爪组成,如图1所示。具有4个自由度。工作时,摆动气缸旋转至立柱左侧至限位位置,双联气缸水平伸出,标准气缸垂直下降,末端手爪抓取工件。摆动气缸左右极限位置由接近开关控制,其他气缸由磁性开关控制其运动位置。机械手动作过程由PLC进行控制,上位机组态实时监控。

图1 气动机械手结构
2 气动系统设计
气动机械手气动系统原理如图2所示。由于系统采用气压传动,在设计时要考虑系统调压、出口节流、顺序动作以及安全等问题,要求手臂不会因自重而下滑,手爪抓紧可靠。
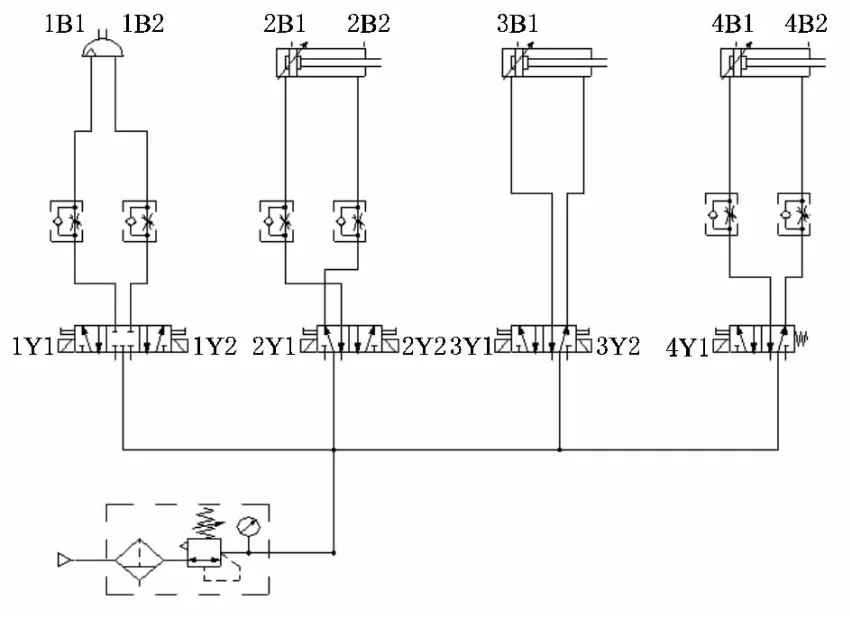
图2 气动机械手气动系统原理图
按照机械手4个自由度结构,气缸选择如下:(1)摆动气缸:SMC,型号CRB1BW30-180S,缸径10 mm,摆动角度180°。(2)双联气缸:SMC,型号CXSM15-100,缸径15 mm,带磁性开关。(3)标准气缸:SMC,型号 CDJ2KB16-60-B,缸径10 mm,行程15 mm,带磁性开关。(4)末端手爪:SMC,型号 M HZ2-10D,手指数2,缸径10 mm。
3 电气控制系统设计
根据机械手动作要求以及气动系统原理,其电气执行元件(气动电磁阀)选用直流24 V的型式,安全可靠,并设置了状态显示灯。(1)机械手动作顺序如下:系统上电,复位灯闪,按复位按钮,复位等灭,开始灯闪,按开始按钮,开始灯灭,摆动气缸至左位(初始位置),双联气缸2伸出,气缸4下降,手爪松开,夹紧工位1工件,气缸4上升,双联气缸2收缩,摆动马达旋转至右位,双联气缸2伸出,气缸4下降,手爪放松,放置工件至工位2。摆动气缸回左位。1个工作行程结束,工件自工位1转移至工位2。(2)PLC选择:采用三菱FX2N-48MR型PLC,输入点数24,输出点数24。外围设备方面采用上位工控机编程,RS-485通信方式,外部输入设备有接近开关、按钮和电磁阀等,外部输出设备有继电器、指示灯等。图3为机械手输入地址分配。

图3 机械手输入地址分配
4 组态实时监控
组态的概念最早来自英文configuration,含义是使用软件工具对计算机及软件的各种资源进行配置,达到计算机或软件按照预先设置、自动执行特定任务、满足使用者要求的目的。组态王软件是用于在上位机上实现监控的一种智能化软件,操作简便直观。它使采用PC机开发的系统比以往使用专用机开发的工业控制系统更有通用性,大大减少了工控软件开发者的重复性工作,并可运用PC机丰富的软件资源进行二次开发。组态王软件包由工程管理器(组态王)、工程浏览器、画面运行系统、信息窗口等4部分组成。其中,工程管理器用于新建工程和对工程进行管理。工程浏览器用于将画面制作系统中已设计的图形画面、命令语言、设备驱动程序、各种报表等工程资源进行集中管理。画面运行系统是组态王软件的实时运行环境。信息窗口是一个独立的Windows应用程序,用来记录、显示组态王开发和运行系统在运行时的状态信息[2]。
组态王变量的基本类型共有2类:内存变量、I/O变量。搬运机械手单元共定义了1个内存离散变量和17个内存整型变量。I/O变量是指可与外部数据采集程序直接进行数据交换的变量,搬运机械手单元上位机与PLC进行通信定义了13个变量,表1列举了部分基本变量。
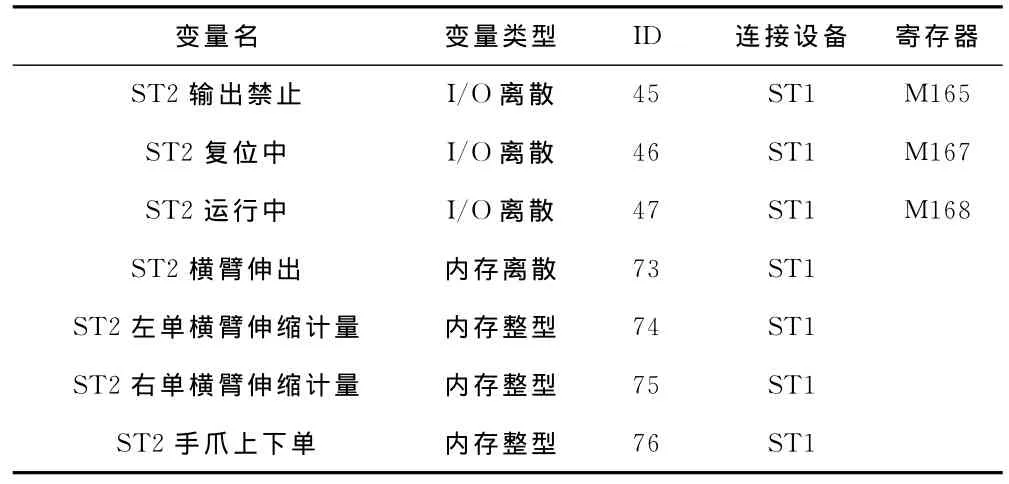
表1 搬运机械手单元部分变量
这种数据交换是双向的、动态的,就是说:在组态王系统运行过程中,每当I/O变量的值改变时,该值就会自动写入PLC或应用程序;每当PLC或应用程序中的值改变时,组态王系统中的变量值也会自动更新。所以,这些从PLC采集来的数据、发送给下位机的指令,例如“ST2输出禁止”“ST2复位中”等变量,都需要设置成I/O变量。
5 结语
搬运机械手单元机械结构部分大多采用标准件,电气控制系统元件少,控制柜和机械部分做成一体。由于采用组态软件和PLC编程,其动作行程可根据现场实际情况随时进行调整。该气动机械手经安装、调试,能够在模拟生产线上良好运行。此系统简单可靠,安全性高,可重复性好,模块化,各项性能指标满足机电一体化教学任务的要求。
[1]王月芹.基于PLC的机械手控制系统设计.液压与气动,2011(9)
[2]北京亚控科技发展有限公司.组态王中文手册,2001