基于极坐标特征的改进模糊C-均值虹膜定位算法
2014-03-06庞彦尼
王 洋,庞彦尼,左 平
(1.吉林大学 计算机科学与技术学院,长春 130012;2.吉林大学 公共计算机教学与研究中心,长春 130012;3.吉林大学 数学学院,长春 130012;4.空军航空大学 基础部,长春 130022)
虹膜定位[1-3]是虹膜识别过程中的重要环节,而虹膜识别系统采集到的虹膜图像通常不理想,可能存在瞳孔反射光斑、睫毛噪声和眼睑噪声等问题,常会导致虹膜定位不准确,影响虹膜识别结果,所以具有高度鲁棒性的虹膜识别算法是构建虹膜识别系统的关键.
目前,虹膜定位算法主要有以下几种:1)基于活动圆模板匹配算法(简称Daugman算法)[4-7],其思想是在虹膜图像中一定区域内以一个圆形边缘探测器反复寻找虹膜的内外边缘,直至找到最佳匹配的两个圆;2)基于模糊C-均值(fuzzyC-means,FCM)的虹膜定位算法[8],先对虹膜图像进行聚类,然后对聚类结果进行边缘检测和Hough变换以获得虹膜内外圆参数;3)水平集方法[9-11],也是常用的虹膜分割方法,但水平集方法依赖于偏微分方程控制的曲线演化模型,收敛速度慢,且对曲线初始化位置及光照条件非常敏感.实际应用中,Daugman算法的准确性较高,但在虹膜图像上迭代搜索圆心位置和半径的时间复杂度较高.因此,该算法应用到实时虹膜识别系统中需要解决两个问题:1)如何快速计算虹膜外圆的圆心和半径;2)在非理想情况下,怎样去除眼睑和睫毛的干扰,避免陷入局部极值.本文提出一种基于极坐标特征的FCM虹膜外圆定位算法,即首先根据改进FCM算法对虹膜外圆进行粗定位,再基于圆形模板进行精定位.实验结果表明,该算法提高了边缘定位的速度,同时也提高了算法的鲁棒性.
1 虹膜外圆边缘的粗定位
1.1 基于极坐标变换的聚类特征
在传统基于FCM的虹膜定位算法[8]中,虹膜图像中每个像素点的位置信息和灰度信息被选取为特征,然后对虹膜图像中每个像素点的三维特征进行FCM聚类.但实验对比表明,图像中虹膜像素灰度值与巩膜相近,易被错误聚类.事实上,基于FCM的虹膜定位算法采用空间信息作为聚类属性,聚类结果中每类中心在图像上为一个像素点,同类样本中只有数量很少的样本点在该中心点附近,大部分样本点都与中心点相距较远,所以灰度值属性在聚类时具有重要作用,而虹膜边缘一些像素点的灰度值与巩膜灰度值相近,从而被错分的样本点大多数在虹膜边缘部分.基于上述分析,本文采用极坐标下半径信息代替坐标信息作为聚类属性对虹膜图像进行聚类,由此得到的聚类中心在图像上表现为一个圆,各类中的大部分点围绕在中心所代表的圆周附近,这样也更能反映虹膜外边缘近似为圆的特性.
为确保直角坐标转换成极坐标时极坐标系原点在瞳孔内,先采用灰度投影法对瞳孔中心进行初始定位.设g(x,y)为虹膜图像(x,y)处的灰度值,根据瞳孔、虹膜及巩膜灰度分布规律可知,瞳孔的近似中心位置(xp,yp)为


其中:c为聚类个数;p>1为模糊指数;N为样本点个数;U=(uij)c×n是一个c×n的模糊划分矩阵,uij是第j个样本属于第i类的隶属度值;V=(v1,v2,…,vc)是由c个聚类中心向量构成的s×c矩阵,vj是聚类中心;xk是样本点;Nk为样本点xk的3×3邻域.则其隶属度矩阵与聚类中心更新公式为
以(xp,yp)为极坐标原点将虹膜图像中每个点到瞳孔圆心的距离记为rij,即得到了包含半径信息和灰度信息(rij,gij)的虹膜图像聚类特征.
1.2 基于极坐标特征的改进FCM聚类算法
在传统基于FCM虹膜定位算法[8]中,FCM算法要求同一个样本属于所有类的隶属度之和为1,使得其对噪声和奇异点较敏感.同时在极坐标下,虹膜图像中像素点邻域内属于同一聚类的可能性较大.因此,本文提出改进的FCM算法(modified fuzzyC-means,IFCM).IFCM算法的目标函数为
IFCM算法步骤如下:
1)设定聚类个数c和模糊指数p及收敛精度ε;令迭代次数k=0;初始化中心矩阵V(0);
2)用式(3)a计算U(k+1);
3)用式(3)b计算V(k+1),令k=k+1;
4)如果‖V(k)-V(k-1)‖≤ε,则停止迭代;否则,转2).
以半径信息和灰度信息(rij,gij)作为特征对虹膜图像使用IFCM算法聚类,聚类结果如图1所示.

图1 虹膜图像粗定位结果Fig.1 Coarse location of iris images
由图1可见,最内层的圆即代表虹膜部分聚类的中心,将虹膜内圆圆心记为(x,y),将内圆圆心左侧第一个非0像素的行坐标记为l,以r=l-x作为外圆半径的初始值,即完成了对虹膜外圆边缘的粗定位.
2 虹膜外圆边缘的精定位
由于活动圆模板匹配算法具有较好的鲁棒性和准确性,因此即使是不清晰的虹膜图像也能很好地定位,但该算法实质上是从圆心沿半径方向搜索圆形边缘的过程,可能存在陷入局部极值的情况,且在整幅图像上搜索非常耗时.此外,由于虹膜具有高度对称性,为了减少计算量,只需在1/4个圆周范围内搜索即可.基于对Daugman算法上述优缺点的考虑,从Daugman的圆模板算子出发,以虹膜内圆的圆心为圆心,以粗定位聚类中心的半径信息为半径,使用如下算子在-π/4~π/4内进行外圆精定位,算子J(x,y,r)如下:

其中:I(x,y,r)是以(x,y)为圆心、以r为半径、沿θ方向像素点的灰度值;∑表示θ在1/4圆周范围内进行搜索.
算法步骤如下:
1)对虹膜图像中的每个像素点计算其到瞳孔中心的距离,以此距离作为半径信息,与灰度信息一起作为每个像素点的二维特征;
2)在图像中用像素点的二维特征进行IFCM聚类,将虹膜图像的像素点分为3类;
3)在聚类的图像中,将求得的第一类中心半径信息作为虹膜外圆半径的初始值;
4)对原图像进行Gauss滤波;
5)以(r-10,r+5)作为半径的搜索范围,(x±4,y±6)作为虹膜外圆圆心的搜索范围,在滤波后的图像中求使算子J(x,y,r)最大的(x,y,r),将得到的(x,y,r)作为虹膜外圆参数,完成外圆的精确定位.
3 实验结果
由中国科学院虹膜图像数据库 CASIA(版本3.0)(www.cbsr.ia.ac.cn/irisdatabase)中随机抽取有代表性的2幅虹膜图像,分别用FCM算法和本文算法进行定位,结果如图2所示.由图2可见,基于FCM的虹膜定位算法在虹膜边缘处存在错误聚类,致使外圆定位失败,而本文算法则较准确地定位了虹膜外圆,且由于改进模糊C-均值算法定位的准确性,减少了Daugman算法搜索定位的盲目性,节省了计算时间.
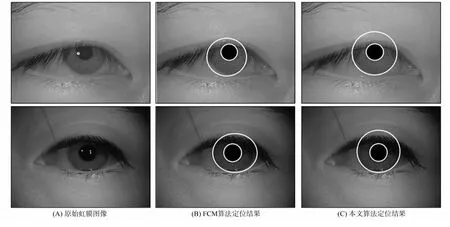
图2 实验对比结果Fig.2 Results of comparative experiments
综上所述,本文采用两步法对虹膜外圆进行定位,可使精定位很快收敛,减少Daugman算法定位搜索的盲目性和计算浪费,同时提出基于极坐标系的改进模糊C-均值聚类算法可较准确地定位虹膜外圆,解决了传统基于模糊C-均值算法由于错分类导致的外圆定位失败问题.数值实验证明了算法的有效性.
[1]MA Li,TAN Tieniu,WANG Yunhong,et al.Efficient Iris Recognition by Characerizing Key Local Variaition[J].IEEE Transactions on Image Processing,2004,13(6):739-750.
[2]Bowyer K W,Hollingsworth K,Flynn P J.Image Understanding for Iris Biometrics:A Survey[J].Computer Vision and Image Understanding,2008,110(2):281-307.
[3]HE Zhaofeng,TAN Tieniu,SUN Zhenan,et al.Toward Accurate and Fast Iris Segmentation for Iris Biometrics[J].IEEE Trans Pattern Analysis and Machine Intelligence,2009,31(9):1670-1684.
[4]Daugman J.High Confidence Visual Recognition of Persons by a Test of Statistical Independence[J].IEEE Trans Pattern Analysis and Machine Intelligence,1993,15(11):1148-1161.
[5]Daugman J.Statistical Richness of Visual Phase Information:Update on Recognizing Persons by Iris Patterns[J].International Journal of Computer Vision,2001,45(1):25-38.
[6]Daugman J.How Iris Recognition Works[J].Circuits and Systems for Video Technology,2004,14(1):21-30.
[7]Daugman J.The Importance of Being Random:Statistical Principles of Iris Recognition[J].Pattern Recognition,2003,36(2):279-291.
[8]Proenca H,Alexandre L Y.Iris Recognition:Analysis of the Error Rates Regarding the Accuracy of the Segmentation Stage[J].Image and Vision Computing,2010,28(1):202-206.
[9]Jarjes A A,WANG Kuanquan,Mohammed G J.A New Iris Segmentation Method Based on Improved Snake Model and Angular Integral Projection[J].Research Journal of Applied Science,Engineering and Technology,2011,3(6):558-568.
[10]Roy K,Bhattacharya P,Suen C Y.Iris Segmentation Using Variational Level Set Method[J].Optics and Laser in Engineering,2011,49(4):578-588.
[11]Verma A,LIU Chengjun,JIA Jiancheng.Iris Recognition Based on Robust Iris Segmentation and Image Enhancement[J].International Journal of Biometrics,2012,4(1):56-76.
