载人月面着陆地形障碍探测与规避方案研究
2014-03-05田林戚发轫果琳丽王平张有山
田林 戚发轫 果琳丽 王平 张有山
(中国空间技术研究院载人航天总体部,北京 100094)
0 引言
月球表面有月海和高地两种典型地形,月海面积占到全月面的约17%。月海和高地中都覆盖着大小不一、形状各异的月球坑和月岩,它们和月面坡度一起成为三类主要的月面地形障碍,给载人月面着陆任务带来极大危险[1-3]。月面地形障碍可能引起月面着陆器倾斜角度过大,后续无法正常起飞返回环月轨道;如果月面着陆器倾覆,将导致载人登月任务失败。着陆过程中月球坑边缘或月岩有可能与月面着陆器结构碰撞,破碎部件受到着陆发动机羽流作用后有可能与主结构发生碰撞,严重时将可能导致月面着陆器功能衰减甚至损毁;着陆在月面崎岖地形中,航天员或月球车无法顺利开展月面考察活动,载人登月工程的成效将大打折扣[4-5]。
在缺乏全月面高精度地形图的情况下,飞行任务实施前的着陆选址只能降低月面着陆器遭遇地形障碍的概率,为有效保障载人月面着陆任务安全并全面提升载人登月任务成效,必须在着陆过程中实时地进行地形障碍探测与规避,并充分发挥航天员的快速判断与智能决策优势,使月面着陆器准确着陆于月面平坦区域。
1 载人月面着陆避障技术发展
1.1 “阿波罗”载人月面着陆器避障
美国“阿波罗”载人登月计划中,受到敏感器技术水平限制,月面着陆过程中的避障全部由航天员手动完成。登月舱中的航天员通过舷窗目测飞行前方月面地形,并通过着陆点指示器(即舷窗上的刻线)预测着陆区域。在飞行高度较高时,如果目标着陆区域地形条件不满足安全着陆要求,航天员将手动输入避障机动指令;在着陆最后阶段,航天员通过手柄直接控制登月舱机动飞行,以准确避开月面障碍。“阿波罗十二号”首次实现了载人月面定点着陆任务,在接近段飞行中航天员进行了7次着陆点重新规划和避障机动(如图1所示),然后又通过手柄操纵登月舱机动飞行,最终准确着陆于距离“勘探者三号”无人月面着陆器163m处的安全区域[6]。图中,P66为“阿波罗”载人月面着陆期间的制导程序之一,N为各个避障阶段的序号,LPD为“阿波罗”登月舱前方舷窗上的“着陆点指示器”,用以辅助航天员瞄准预定月面着陆点。

图1 “阿波罗十二号”月面着陆中航天员手动进行避障机动Fig.1 Human hazard avoidance control in Apollo-12 lunar landingm ission
由于“阿波罗”6次载人登月任务均着陆于月面低纬度地区(南北纬26°以内)而且着陆时光照条件较好,航天员手动避障取得了不错的效果;但在下降最后时刻,下降级主发动机羽流激起的月尘使得航天员难以准确观察月面情况,这种全手动避障方案存在较大风险。例如,“阿波罗十四号”月面着陆后倾斜角达到11°(安全极限为12°);“阿波罗十五号”月面着陆时下降级发动机受损,且整器倾斜10°;“阿波罗十七号”着陆于一块大型月岩附近,给航天员出舱活动带来了极大不便[7-8]。“阿波罗”计划中实际月面着陆情况,如图2所示。

图2 “阿波罗”计划中实际月面着陆情况Fig.2 Actual landing situation of Apollo program
1.2 “星座”计划载人月面着陆避障
“星座”计划是美国于21世纪初提出的载人登月计划,为了确保载人月面着陆安全,NASA约翰逊航天中心(Johnson Space Center,JSC)主导开展了自主着陆障碍规避技术(autonomous landing hazards avoidance technology,ALHAT)研发项目,以实现“识别不小于0.3m的月岩和不小于5°的斜坡,在任意光照条件下安全精确地着陆于月面任何地点”的目标[9-10]。
ALHAT项目中对航天员在着陆避障中的作用和角色进行了重新分析和定位[11-12],研究后认为载人月面着陆任务中航天员应该参与到避障控制闭环中来,通过对基础障碍探测信息的处理分析为航天员提供直观准确的辅助决策信息,航天员手动控制与自动飞行控制系统之间应形成良好的配合与互动。
虽然“星座”计划于2010年中止,但考虑到着陆避障技术在未来载人深空探测中的重要应用价值,ALHAT项目研究一直在持续。2014年4月23日,装备了在ALHAT中研发的新体制敏感器及控制算法的“睡神号”(Morpheus)着陆器成功地在肯尼迪航天中心的地面试验场中完成了自主着陆避障飞行试验,如图3所示。

图3 “睡神号”着陆器进行自主着陆避障飞行试验Fig.3 Autonomous landing and hazard avoidance flight testofMorpheus lunar lander
ALHAT计划中重点发展了3项技术:障碍探测与规避技术(hazards detection and avoidance,HDA),地形相对导航技术(terrain relative navigation,TRN),障碍相对导航技术(hazards relative navigation,HRN),但核心在于发展新型高精度敏感器[13]。
经过认真评估,ALHAT采用了多普勒激光雷达、激光高度计以及闪光式激光雷达(flash laser intensity direction and ranging,Flash LIDAR),其中Flash LIDAR可以在运动状态下对目标地形进行高精度三维成像,是主要的着陆避障敏感器。
为了验证各种敏感器以及相对应的障碍识别、避障机动飞行控制等算法,ALHAT目前已经完成室内测试和多次搭载飞行测试。在数学仿真、直升机/飞机搭载试验成功的基础上,开始了在“睡神号”无人着陆器上的搭载试验[14]。
1.3 “嫦娥三号”月面着陆器
我国“嫦娥三号”无人月面着陆器于2013年12月14日成功软着陆于月球雨海西北部,这是我国第一个地外行星着陆器,并在全世界首次实现了利用机器视觉的地外天体软着陆的自主避障。“嫦娥三号”使用可见光和激光两种手段对月面地形进行观测,并通过粗精接力的方式进行避障机动。实际飞行中,“嫦娥三号”到达距离月面100m高度时开始悬停并对下方50m×50m的月面区域进行详细勘察,仅用了不到30s的时间就识别出安全着陆点,随后转入避障机动段顺利软着陆,综合避障飞行精度为1.5m[15]。
1.4 载人月面着陆避障技术发展方向
载人月面着陆避障是确保飞行任务成功的重要因素,随着光电技术、计算机技术和控制技术的快速进步,着陆过程中可以精确实时地获得月面地形信息,并开展自主避障机动飞行;同时,自主避障技术的发展更有利于发挥航天员的主观能动作用,其手动避障是成为自主避障必不可少的备份[16]。
2 载人月面着陆避障方案设计
载人月面着陆避障涉及到飞行方案设计、地形障碍检测与识别、避障机动控制以及航天员参与的人控避障等方面,结合载人月面着陆飞行过程及着陆避障要求,提出载人月面着陆避障方案,如表1所示。
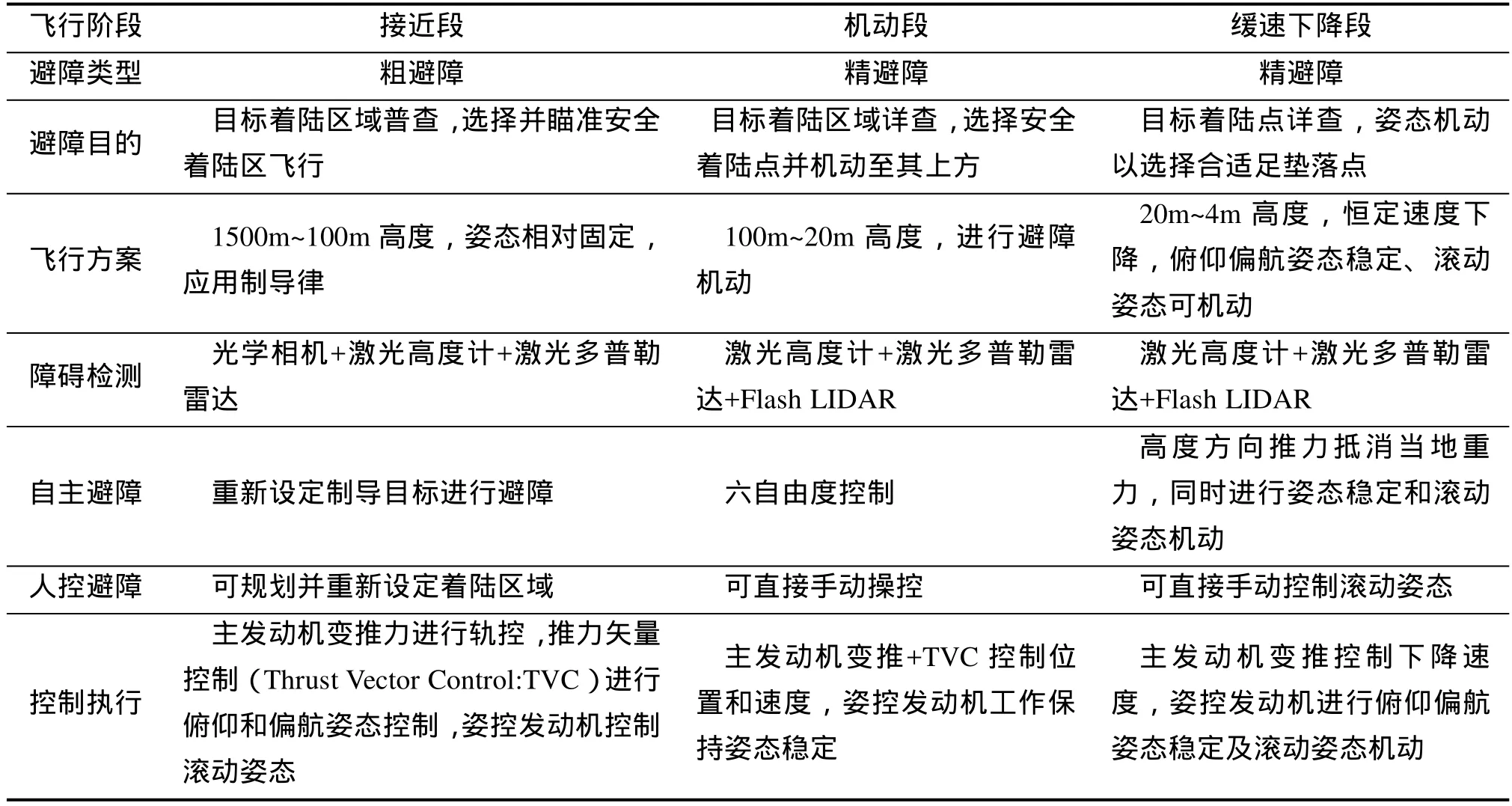
表1 载人月面着陆地形障碍探测与规避方案Tab.1 Terrain hazard detection and avoidance scheme of human lunar landing
2.1 避障飞行方案
由于月面附近接近真空状态,载人月面着陆只能采用全程动力飞行的方式。从距离月面15km高度开始,月面着陆飞行过程可以分为主减速段、姿态调整段、接近段、机动段和缓速下降段,各阶段飞行任务均有不同,主减速段主要目的是为了高效降低月面着陆器轨道速度,同时进行制导以消除下降过程中的轨迹散布;姿态调整段通过快速姿态机动,以满足接近段初始状态要求;接近段以接近固定的姿态飞行,通过制导进一步消除月面着陆器落点误差;机动段初始时刻着陆器相对月面速度已很小,可进行机动飞行;缓速下降段着陆器以恒定速度下降,直至着陆月面。
根据月面着陆器飞行状态和敏感器作用距离限制,可在接近段、机动段和缓速下降段3个飞行阶段中进行避障。根据获取地形障碍信息的精度以及机动飞行控制能力,可将避障分为粗避障和精避障两种类型。
在接近段,从距离月面1500m高度开始,以相对月面固定姿态飞行,对目标着陆区域进行大致观察;基于障碍检测识别结果调整制导目标,以避开地形障碍较多区域;此阶段属于粗避障。
在机动段,从距离月面约100m高度开始,接近悬停状态,对目标着陆点进行详细观察;基于障碍检测识别结果进行六自由度控制,以到达安全着陆点上方;此阶段属于精避障。
在缓速下降段,从距离月面约20m高度开始,以2m/s恒速下降直至发动机关机(4m高度);对目标着陆点进行进一步观察,并分析各着陆腿月面接触点处情况;如有需要可进行滚动方向(沿着陆器纵轴)姿态调整,确保着陆腿足垫不会着陆于突出月岩上、或者着陆于月球坑后整器发生陷落;此阶段属于精避障。
着陆避障阶段的飞行方案,如图4所示。

图4 载人月面着陆飞行过程与避障飞行方案Fig.4 Flight process and hazard avoidance scheme of human lunar landing
2.2 地形障碍检测与识别方案
载人月面着陆避障采用可见光测量和激光测量两种手段进行月面地形观测。
2.2.1 可见光测量
月面着陆器配置光学相机,在接近段飞行中对目标着陆区域进行观测。通过光学图像处理,识别月球坑、月岩等典型地貌特征,并基于阴影等特征识别月面坡度。
可见光测量可以获取大面积的月面地形信息,但成像品量容易受到月面光照条件影响。由于飞行高度较高,而且获得的基本信息是二维的,可见光测量只能辨识出尺寸较大、特征明显的月面地形障碍,适合进行大范围月面着陆区域的分析比较。
2.2.2 激光测量
月面着陆器配置激光高度计、多普勒激光雷达和Flash LIDAR,在接近段后期和机动段、缓速下降段对目标着陆点进行详细勘察。
Flash LIDAR一次成像获取目标着陆点附近区域高程信息,重构得到三维地形信息,进一步解算辨识可以获得准确的月面地形障碍信息。相对光学成像,激光三维成像在地形坡度辨识上具有突出的优势,但激光三维成像区域小、信息处理过程长,数据输出频率难以提高;同时,距离月面较低时发动机羽流激起的月尘会显著降低激光测量精度。
激光高度计可以准确测量相对月面高度(0.2m精度)、多普勒激光雷达可以准确测量相对月面高度(0.05m精度)和速度(0.01m/s精度),用于避障阶段的相对导航。
着陆避障阶段的敏感器工作规划,如图5所示。

图5 载人月面着陆避障敏感器工作规划Fig.5 Working planning of hazard avoidance sensors during human lunar landing
2.3 地形障碍规避机动控制
根据避障飞行方案设计,接近段飞行有制导,机动段飞行属于六自由度控制,缓速下降段是在维持月面着陆器姿态稳定的同时保持恒定下降速度,相应各阶段避障机动控制方法也不同。
月面着陆器配置1台变推力发动机,可双向侧摆进行俯仰和偏航姿态控制(TVC);配置16台姿控发动机,用于姿态控制。
(1)接近段避障控制方法
如果经过障碍检测发现当前目标着陆区域地形不满足安全着陆要求,则需要在下降轨道面内重新设定目标着陆区域。将新生成的目标着陆区域作为制导目标位置,原制导目标速度保持不变,生成制导指令控制月面着陆器飞行。
接近段轨控指令由主发动机执行,TVC控制俯仰和偏航姿态,姿控发动机控制滚动姿态。
(2)机动段避障控制方法
机动段本身就是为了避障设置的飞行阶段。基于障碍检测结果进行六自由度控制,目标位置即为障碍检测确定的安全着陆点,目标高度为20m,横向目标速度为0,垂直方向速度为-2m/s,目标姿态与月面当地固连坐标系重合。
机动段位置速度控制通过主发动机变推力以及侧摆实现;为了维持机动过程中的姿态稳定,主发动机侧摆后引起的扰动力矩由姿控发动机抵消。
(3)缓速下降段避障控制方法
缓速下降段仅根据着陆点处地形信息进行滚动姿态控制,俯仰和偏航方向保持姿态稳定;垂直方向推力只需抵消当前月面着陆器重力即可,横向目标速度为0。
缓速下降段垂直方向速度由主发动机变推力进行控制,此阶段主发动机不进行侧摆,俯仰偏航方向的姿态稳定以及滚动方向的姿态机动等控制指令由姿控发动机执行。
3 载人月面着陆人控避障方案设计
3.1 航天员月面地形观测
接近段及后续飞行过程中,设计月面着陆器舷窗朝向飞行前进方向。随着月面着陆器纵轴与当地月球重力反方向角度逐渐减小,航天员通过舷窗观察月面地形的视角会逐渐增大。
在月面着陆器舷窗上增加瞄准刻线,用于航天员在接近段及后续飞行过程中人工预测目标着陆点,并对着陆点地形进行评估。
光学相机和Flash LIDAR观察图像实时显示在月面着陆器舱内,并融合显示预测着陆点位置,用于航天员进行人工避障检测。
3.2 面向航天员的辅助决策
航天员在着陆避障中的突出优势是快速判断和智能决策,对于已有地形光学图像或者三维数字高程图,航天员很快就能辨识地形障碍并做出安全着陆点选择。但航天员的辨识效果和判断准确性很容易受到舱内环境、飞行过载以及心理状态的影响,需要自主避障系统为其提供辅助信息,才能达到较好的人机协同工作效果。
自主避障系统对月面地形观测信息进行处理,在目标着陆区域地形图上对地形障碍进行醒目标识,给出地形障碍大小和危险等级等数字信息;标识出安全着陆区域,按照一定准则给出各着陆区域优先等级。在机动段,自主避障系统会根据月面着陆器当前状态(位置、速度和推进剂剩余量),对月面着陆器机动可达区域进行预测,作为安全着陆点优先级排序的依据。以上避障辅助决策信息可将航天员从低端重复性计算判断工作中解放出来,从而集中精力完成关键的快速智能决策工作。
3.3 航天员手动控制
在接近段飞行中,航天员可在月面地形图中直接点击,以选择确定目标着陆区域。由于此时月面着陆器飞行状态变化较快,不适合航天员直接手动操作。
在机动段飞行中,航天员可利用控制手柄直接操纵月面着陆器进行避障机动飞行。手柄操纵指令经过月面着陆器控制计算机解算,转换为主发动机推力大小、TVC侧摆角以及姿控发动机开关机等指令,并发动到各远端控制器执行。
3.4 人控避障与自主避障
航天员参与的避障方案,如图6所示。自主避障是月面着陆避障的主份系统,人控避障基于自主避障信息处理结果进行智能决策、所施加操控指令也由自主避障系统具体执行,两者相互关系及信息流,如图7所示。

图6 航天员人控避障方案Fig.6 Astronautmanualhazard avoidance control scheme
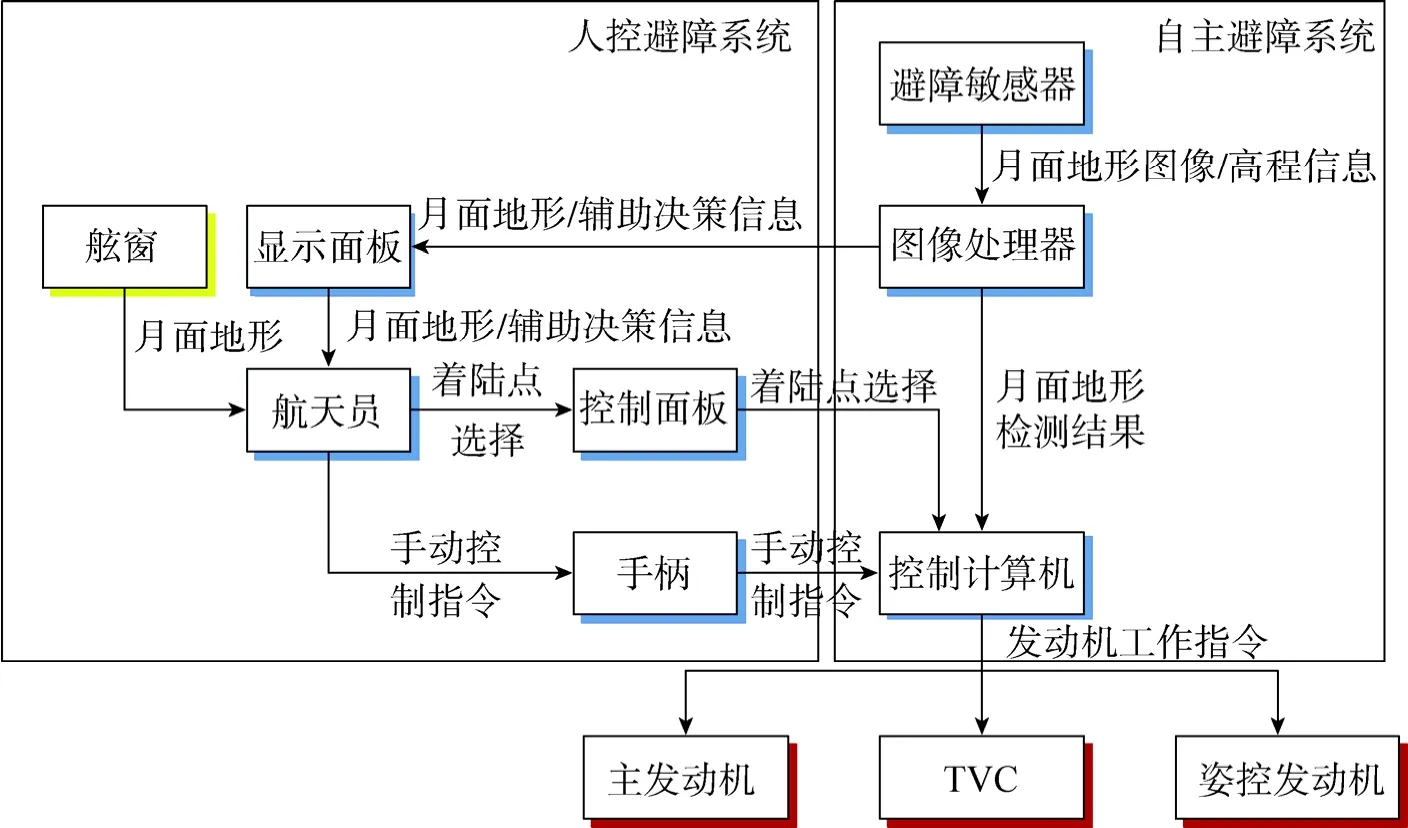
图7 载人月面着陆人控避障与自主避障Fig.7 Human and autonomous hazard avoidance control ofmanned lunar landing
4 结束语
文章对典型载人登月任务中的月面着陆避障技术发展进行了调研,总结出载人月面着陆避障的发展趋势;结合载人月面着陆基本飞行方案提出避障飞行方案,规划各飞行阶段的避障任务;结合各飞行阶段特点以及敏感器应用条件,设计了载人月面着陆地形障碍检测方案,利用可见光和激光测量形成对着陆目标区域的普查和详查;提出了避障所需机动飞行的控制方法,包括制导目标重设、六自由度控制以及滚动姿态机动等。结合载人飞行特点和月面着陆避障任务,设计了人控避障方案,包括地形观测、辅助决策和人控。
载人月面着陆避障方案充分考虑了着陆动力飞行特点、载人飞行任务的安全性可靠性要求以及主要约束条件,具有较高的工程适用性。
(References)
[1] Andrew E J,Andres H,Robert A,et al.Analysis of On-board Hazard Detection and Avoidance for Safe Lunar Landing[C].IEEEAutonomous ControlConference,2008.
[2] Andrew E J,A llan R K,James B C,et al.Lidar-based Hazard Avoidance for Safe Landing on Mars[J].Journal of Guidance,Control,and Dynam ics,2002,25(6):1091-1099.
[3] 王海涛,马建华.基于降落图像的安全着陆点选择技术研究[J].航天返回与遥感,2012,33(4):13-18.WANG Haitao,MA Jianhua.Safe Landing Site Selection Based on Landing Image[J].SpacecraftRecovery&Remote Sensing,2012,33(4):13-18.(in Chinese)
[4] 张玥.月球表面地形数据分析及仿真研究[D].长沙:国防科学技术大学,2008.ZHANG Yue.Analysis and Simulation of Lunar Surface Terrain Data[D].Changsha:National University of Defense Technology,2008.(in Chinese)
[5] 王大轶,黄翔宇.深空探测自主导航与控制技术综述[J].空间控制技术与应用,2009,35(3):6-13.WANG Dayi,HUANG Xiangyu.Survey of Autonomous Navigation and Control for Deep-space Exploration[J].Aerospace Controland Application,2009,35(3):6-13.(in Chinese)
[6] A llan RK.Apollo Guidance,Navigation and Control[R].CambridgeMassachusetts,1976.
[7] Apollo-12M ission Report[R].N76-78038,Houston Texas:Lyndon B.Johnson Space Center,1970.
[8] Apollo Program Summary Report[R].JSC-09423,Houston,Texas:Lyndon B.Johnson Space Center,1975.
[9] Chirold D E,Thomas B S.TheAutonomous Precision Landing and Hazard Detection and Avoidance Technology(ALHAT)[R].NASA Johnson Space Center,2006.
[10] Alan L S,Adrew E J.Terrain Hazard Detection&Avoidance during the Descent&Landing Phase of the Altair M ission[R].NASA Johnson Space Center,JetPropulsion Laboratory,2010.
[11] HUIYingwen,Kevin R D,Catherin L S,et al.Modeling Human-automation Task Allocations in Lunar Landing[C].IEEE AutonomousControlConference,2011.
[12] Eric M,Karl D B,Chad F.Improved Lunar Lander Handling Qualities through Control Response Type and Display Enhancements[C].NASAAmes Research Center,2010.
[13] 丁萌,曹云峰,吴庆宪.月球探测器着陆中基于被动图像的着陆场搜索及斜坡估计[J].宇航学报,2009,30(6):2258-2264.DING Meng,CAO Yunfeng,WU Qingxian.Passive Image-based Safe Landing Site Searching and Slope Estimation in Probe Landing[C].JournalofAstronautics,2009,30(6):2258-2264.(in Chinese)
[14] Chirold D E,Edward A R,David K R.Helicopter Field Testing of NASA's Autonomous Landing and Hazard Avoidance Technology(ALHAT)System Fully Integrated w ith the Morpheus Vertical Test Bed Avionics[R].JSC-CN-29275,NASA Johnson Space Center,2014.
[15] 张洪华,梁俊,黄翔宇,等.嫦娥三号自主避障软着陆控制技术[J].中国科学:技术科学,44(6):559-568,2014.ZHANG Honghua,LIANG Jun,HUANG Xiangyu,et al.Autonomous Hazard Avoidance Control for Chang'e-3 Soft Landing[J].Science China:Technology Science,44(6):559-568,2014.(in Chinese)
[16] 苑云,朱肇昆,张小虎.基于单应视差的月面着陆区离面测量及平坦性分析[J].航天返回与遥感,2011,32(2):26-33.YUAN Yun,ZHU Zhaokun,ZHANG Xiaohu.Off-plane Measurement and Flatness Analysis of Moon Landing Region Based on Homography Parallax[J].SpacecraftRecovery&Remote Sensing,2011,32(2):26-33.(in Chinese)