“嫦娥三号”着陆缓冲机构的研究成果及其应用
2014-03-05杨建中满剑锋曾福明朱汪聂宏
杨建中 满剑锋 曾福明 朱汪 聂宏
(1中国空间技术研究院总体部,北京100094)(2南京航空航天大学航空宇航学院,南京210016)
0 引言
着陆缓冲技术是深空着陆探测或回收的一项关键技术,许多学者都对此进行了有益的探索。文献[1]对火星探测减速着陆技术进行了分析,并归纳总结了火星探测器减速着陆技术的发展趋势。文献[2]研究了美国、欧洲、俄罗斯在载人飞船、登月舱、火星着陆器等载人航天器回收着陆技术方面取得的成果,为我国着陆缓冲技术的发展提供了参考。文献[3]提出了一种着陆缓冲机构设计方法,为着陆缓冲机构的设计提供了有益指导。在“嫦娥三号”研制过程中,投入了很大的力量来突破着陆缓冲这一关键技术。“嫦娥三号”通过4套着陆缓冲机构实现月面着陆缓冲,如图1所示[4]。它们以平面对称的方式安装在着陆器结构的底部。发射阶段,着陆缓冲机构处于收拢压紧状态,以满足运载的包络要求。到达预定的轨道后,着陆缓冲机构释放展开并锁定,以便为着陆时提供较大的支撑面积,有效避免着陆时的翻倒。着陆器进入月球轨道,且开始向月面降落后,通过一系列的减速控制,最终依靠着陆缓冲机构缓冲着陆器着陆瞬时受到的冲击载荷,实现着陆器在月面的稳定、安全着陆[4]。着陆完成后,着陆缓冲机构长期、稳定地支撑着陆器,为巡视器的顺利释放及相关有效载荷的正常工作创造条件。因此,着陆缓冲机构的性能是否可靠直接关系着整个“嫦娥三号”着陆探测计划的成败。
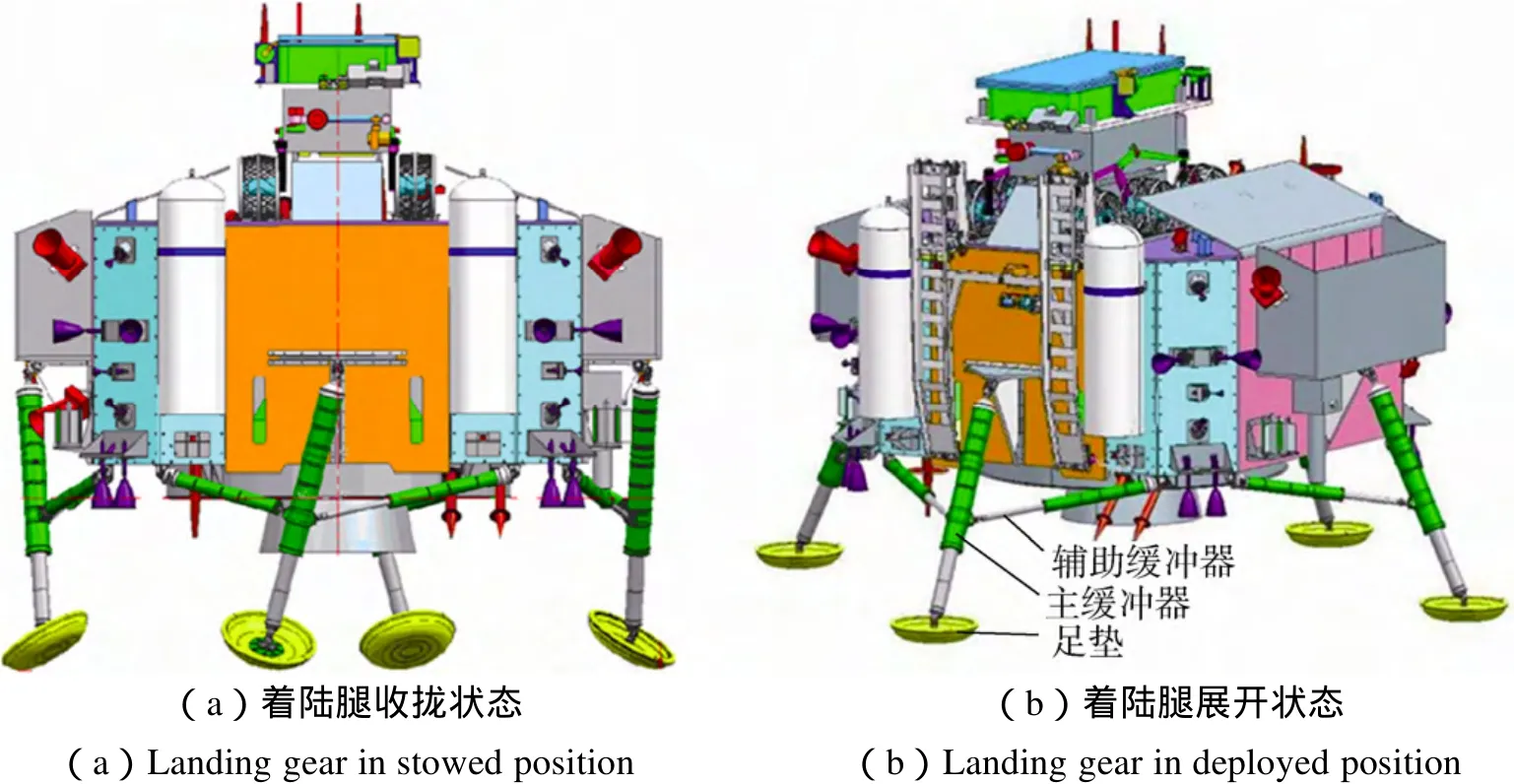
图1 “嫦娥三号”着陆缓冲机构Fig.1 Landing gear for Chang’e-3
在“嫦娥三号”着陆缓冲机构研制过程中,通过自主创新在缓冲方法选取、着陆缓冲机构设计、着陆过程仿真分析、着陆缓冲机构地面验证等方面取得了丰硕的研究成果。本文对其中的铝蜂窝缓冲特点、机构关键参数设计、地面缓冲试验以及研究成果的推广进行介绍。
1 缓冲方法研究
在“嫦娥三号”着陆缓冲机构工程研制过程中,对铝蜂窝压溃变形缓冲技术等进行了深入研究,解决了铝蜂窝压溃过程中的不规则变形及其导致的缓冲力不稳定问题[5],同时提出了可提供较大缓冲力的铝蜂窝压溃与薄壁金属管压溃相组合的缓冲技术[6],铝蜂窝压溃与金属杆拉伸相结合的拉压双向缓冲技术[7]等,最终满足了着陆缓冲机构的缓冲需要。
1.1 缓冲性能要求
一般而言,缓冲性能要具有受空间环境影响小、可靠性高、存储寿命长等优点。在选择着陆缓冲方法时,除了要考虑上述要求外,还要考虑以下要求:
1)不可逆性。尽可能把航天器着陆时的动能不可逆地转变为其他形式的能量,如塑性变形能、热能、电能等,而不要通过弹性变形来储存能量,以避免弹性变形能的自由释放而导致二次冲击或其他难以控制的后果。
2)高效性。耗散单位能量所需的缓冲材料质量轻、体积小,所需的防热、径向约束等附加措施或条件少,以便在有限的质量、空间和能源条件下完成缓冲任务。
3)稳定性。缓冲方法受地面存储环境以及空间环境的影响小,且在缓冲过程中缓冲力的波动小,以保证稳定吸能,避免着陆时的冲击响应值超出要求。
4)可设计性。可以通过改变某个设计尺寸,来方便地适应不同能量的吸收,或保证不同的缓冲能力裕度,以适应可能的着陆初始条件的变化。
5)工艺性。缓冲方法易于工程实施,便于加工制造、装配调试和使用。
6)易检验性。在地面可以方便地对表征缓冲力大小的有关参数进行检验、测量,以确保缓冲力满足要求。
7)经济性。加工、装配、调试、试验等环节的成本低。
1.2 铝蜂窝缓冲特点
对于拉伸成形的铝蜂窝而言,由于加工工艺的限制,铝蜂窝沿芯格轴线方向的尺寸一般不超过150mm。当缓冲行程要求较大时,可以把几段铝蜂窝串联起来使用,这样不仅可以降低加工难度,而且在冲击输入不变的前提下,可以通过不同规格铝蜂窝的串联组合,得到期望的缓冲输出曲线[8]。
铝蜂窝的缓冲能力与铝箔材料的屈服强度、铝箔的厚度、芯格的尺寸有关。这些参数受环境温度的影响小,因此铝蜂窝的缓冲力比较稳定,非常适合空间环境下的着陆缓冲。实测的铝蜂窝材料静态变形时的缓冲力曲线如图2(a)所示,铝蜂窝材料压溃过程如图2(b)所示。

图2 典型铝蜂窝材料缓冲力曲线及压缩过程Fig.2 Al-honeycomb compression and characteristics
铝蜂窝压溃变形时,其缓冲力具有以下特点:
1)缓冲力具有较长的“平台”特性。在静态压缩变形的初期,芯格侧面由光滑到皱褶变形的过程中,缓冲力–位移曲线会出现一个宽度很小、数值较大的“峰值”,随后是一段较长的“平台”。
2)在不同冲击速度下,铝蜂窝缓冲力会略有区别。如图3所示,冲击速度为7m/s时对应的缓冲力–位移曲线比冲击速度为4.43m/s时对应的缓冲力–位移曲线的波动要大,且相应的平均缓冲力也稍大。
3)冲击过程中铝蜂窝有可能失稳。当铝蜂窝存在局部缺陷时,或冲击力的方向与铝蜂窝芯格轴线方向不重合时,铝蜂窝在冲击变形过程中有可能局部失稳,由此将导致缓冲力出现较大波动。

图3 铝蜂窝材料冲击缓冲曲线Fig.3 A l-honeycomb dynam ic compression characteristics
2 机构关键参数设计
在“嫦娥三号”着陆缓冲机构的研制过程中,基于能量法提出了着陆缓冲机构几何参数确定及缓冲能力设计方法,有效指导了着陆缓冲机构的设计。
2.1 几何参数确定方法
着陆器翻倒过程中势能的变化情况如图4所示[4]。着陆缓冲机构设计需要确定的关键几何参数包括着陆瞬时着陆器结构最低点到月面的初始高度Lh和相邻两个足垫中心连线与着陆器结构中心轴线之间的距离LV。图中L0为着陆器质心到结构最低点的距离;H0为着陆器的质心高度;Δh为着陆器翻倒过程中质心位置升高的最大值。

图4 着陆器翻倒过程中势能的变化Fig.4 Potential energy variation during overturn of the lander
为减小系统的质量,在满足着陆稳定性要求的前提下,Lh、LV的值应尽可能地小。其中,Lh的最小值Lh,min可以通过式(1)估算:

式中Sh为主缓冲器在垂直方向的位移;S0为着陆器着陆后结构最低点距离着陆面的安全预留距离;ΔH为着陆器着陆过程中相对着陆面的下陷深度。
一般情况下,着陆器质心到结构最低点的距离L0是已知的,因此,当Lh,min数值确定后,着陆器的质心高度H0便可以按式(2)确定:

在设计初始阶段,可以利用能量转换原理来初步估算LV的数值。为保证着陆过程中着陆器不翻倒,必须满足以下条件:

式中WD为着陆过程中着陆器翻转开始时具有的动能;WH为着陆器质心运动到相邻足垫中心连线所在的竖直平面内时(即着陆器的质心在着陆面上的投影落到稳定性多变形的某一边上时)着陆器相对着陆瞬时势能的增加。为便于估算WD的数值,并确保公式(3)的成立,WD可以认为是着陆瞬时着陆器所具有的动能。即只要着陆瞬时着陆器的动能不大于翻倒过程中着陆器势能的增加,着陆器就不会翻倒。WD可按式(4)计算:

式中m为着陆器质量;vV为着陆瞬时着陆器的垂直速度;vh为着陆瞬时着陆器的水平速度。
WH可按式(5)计算:

式中g′为月面重力加速度;Δh为着陆器翻倒过程中质心位置升高的最大值,如图4所示。
Δh的值可以按主缓冲器不缩短、足垫不下陷来估算,即:

由式(3)~式(6)可得:

2.2 缓冲能力确定方法
着陆缓冲机构需要吸收的总能量主要包括:着陆器着陆瞬时所具有的动能以及由于缓冲器工作和足垫下陷而减少的着陆器重力势能。考虑到足垫下陷的深度以及此过程中着陆面的变形吸能量难以确定,在初步设计时,可以假设由于足垫下陷而导致的重力势能的减少量与着陆面的变形吸能量相同。此假设的物理意义是着陆器在刚性着陆面上着陆。
着陆过程中由主缓冲器吸收的总能量W为:

式中H为从着陆瞬时开始到稳定着陆后由于主缓冲器压缩而导致的着陆器质心的下降高度。
在设计初期可以假设每个主缓冲器的最大吸能能力为:

式中Amax为每个主缓冲器的最大吸能能力;a0为某一常数,它与着陆面的形貌、机械特性和初始着陆速度以及机构的具体构型等有关。
辅助缓冲器主要用于缓冲水平方向的冲击载荷。在初始设计时可以按单个辅助缓冲器吸收整个着陆器水平方向的全部动能考虑,即单个辅助缓冲器的最大吸能能力Bmax为:

事实上,由于着陆缓冲机构的构型不同,辅助缓冲器在拉伸和压缩时吸收的能量往往不一样,前者一般大于后者,且可能大于公式(10)的计算值。一般情况下,着陆瞬时主缓冲器轴线与着陆面的夹角越小,辅助缓冲器越容易发生拉伸变形,着陆过程中通过它可以吸收的能量也就越多。
3 地面缓冲试验
3.1 单套着陆缓冲机构的缓冲试验
缓冲性能是着陆缓冲机构的核心性能,因此需要在地面开展大量的试验对其缓冲性能进行全面的验证。该试验在专用的试验台上完成。试验台由导轨、释放装置、吊篮和配重及测力平台等组成,冲击试验台及试件安装情况如图5所示。

图5 冲击试验台及试件安装Fig.5 Schema of impact test facility
试验时将着陆缓冲机构与吊篮相连,吊篮用于模拟着陆时的质量,它通过释放装置(挂弹钩)与起吊装置相连,可沿导轨在竖直方向移动。通过调整配重的质量、吊篮与着陆缓冲机构的安装接口以及投放高度等,保证施加在着陆缓冲机构上的冲击能量、冲击载荷及其与着陆面之间的相对姿态满足要求。为了准确测量着陆时的冲击载荷,一般在模拟着陆面的下面安放专用的6维测力平台,在主缓冲器和辅助缓冲器与吊篮的接口处设置相应的测力传感器,分别用于测量主缓冲器、辅助缓冲器对吊篮的作用力。
在试验过程中,为了模拟着陆器以不同姿态着陆时着陆缓冲机构的缓冲情况,可以将着陆缓冲机构相对吊篮旋转不同的角度。
3.2 组合缓冲性能试验
该试验主要用于考核多套着陆缓冲机构组合使用时的缓冲能力,即将安装有多套着陆缓冲机构的模拟着陆器起吊到一定的高度,而后以一定的水平速度和姿态释放,验证着陆缓冲机构的缓冲情况或模拟着陆器上相应位置点的冲击响应情况,如图6所示[4]。
试验时将模拟着陆器通过电磁解锁装置与双摆杆相连,双摆杆为平行四边形机构,在其摆动过程中,其下表面始终保持水平。根据预期的着陆速度,通过卷扬机把模拟着陆器拉偏一定的角度,而后释放卷扬机,让双摆杆自由摆动,当其下表面摆动到最低位置时,电磁解锁装置解锁,从而释放模拟着陆器,使其按期望的速度和姿态着陆。
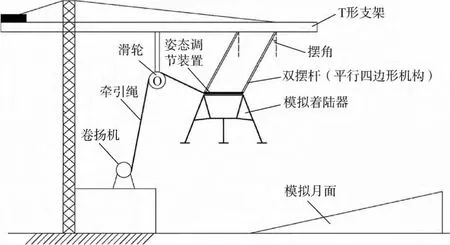
图6 组合缓冲性能试验Fig.6 System testof the attenuation characteristics
姿态调节装置可以实现绕3个正交轴的旋转角度的调整,从而可以模拟着陆时的不同姿态。通过控制双摆杆摆角的大小,可以模拟不同的水平着陆速度。通过控制投放高度,可以模拟不同的垂直着陆速度。通过在地面铺设专用的模拟土壤,可以模拟月面的不同机械特性。通过在着陆场设置相应的凸起、凹坑,可以模拟着陆面的地形地貌。通过上述模拟量的有机组合,可以模拟多种可能的着陆初始条件。
该试验要模拟、测量的物理参数很多,试验实施的难度很大,代价很高,因此,该试验要结合相应仿真试验的结果来开展,仅针对那些恶劣的、典型的着陆工况进行有限次数的试验验证。
该试验中模拟土壤的制备一般是在土壤力学专家的指导下实施[9-10],根据对目标星体表面土壤情况的认识,从颗粒级配、密度、含水量、内摩擦角等多方面进行控制,从而利用地面土壤来模拟月壤的机械特性。
4 研究成果的推广应用
4.1 航天器着陆缓冲领域
“嫦娥三号”着陆缓冲技术在以下航天器着陆缓冲领域中也具有广阔的应用前景:
1)火星等行星探测器的着陆缓冲。只要控制好着陆速度、识别好着陆区,并确定适当的着陆时刻,避免火星表面风速的影响,在火星表面的缓冲与在月球表面的缓冲没有实质性差别,“嫦娥三号”着陆缓冲技术通过适应性改进就可以应用于火星表面的着陆缓冲。
2)新一代可重复使用飞船返回舱的着陆缓冲。目前美国已经提出了可重复使用的飞船返回舱技术,该返回舱的着陆就采用着陆缓冲机构实现缓冲和落地后的支撑,从而避免飞船壳体直接着陆而导致的变形等损伤。我国新一代飞船返回舱也可以采用类似的技术实现着陆时的缓冲。
4.2 缓冲技术的地面应用
在我国航天器着陆缓冲技术进一步发展的同时,应加快相关技术在地面应用的推广工作,以便让航天技术更多、更好地为我国国民经济的发展服务,让航天技术作为更强劲的引擎带动民用技术的发展,实现航天技术与地面应用密切结合、相互支撑、相互促进的发展目标。
缓冲技术的地面应用可体现在以下几个方面:
1)直升机抗坠毁。“嫦娥三号”着陆缓冲技术可以用于直升机机身的抗坠毁以及飞行员座椅的抗坠毁,从而有效保护飞行员的生命安全。
2)交通安全。“嫦娥三号”着陆缓冲技术可以用于高速列车车厢之间的碰撞防护、公路拦石网、公路护栏、汽车碰撞防护、桥梁碰撞防护、桥梁限高杆等,有效降低重大交通事故造成的损失。
3)反恐防爆。相应的缓冲材料可以用于制造轻质便携式防爆罐,有效降低爆炸恐怖活动对人民生命财产造成的影响。
5 结束语
通过“嫦娥三号”着陆缓冲机构的研究,在缓冲方法选择、机构设计方法、地面验证方法与实施等方面取得了丰硕的成果。这些研究成果对于后续月面取样返回、火星探测、载人登月等深空着陆探测任务的开展,以及地面碰撞缓冲与爆炸防护技术的研究等奠定了良好的技术基础。
(References)
[1] 贾贺,荣伟.火星探测器减速着陆技术分析[J].航天返回与遥感,2010,31(3):6-14.JIA He,RONG Wei.Mars Exploration Deceleration Landing Technology Analysis[J].Spacecraft Recovery&Remote Sensing,2010,31(3):6-14.(in Chinese)
[2] 高滨.国外载人航天器回收着陆技术的进展[J].航天返回与遥感,2009,30(2):1-9.GAO Bin.An Overview of Recovery and Landing Systems for Foreign Manned Spacecrafts[J].Spacecraft Recovery&Remote Sensing,2009,30(2):1-9.(in Chinese)
[3] 曾福明,杨建中,满剑锋,等.月球着陆器着陆缓冲机构设计方法研究[J].航天器工程,2011,20(2):46-51.ZENG Fum ing,YANG Jianzhong,MAN Jianfeng,et al.Study on Design Method of Landing Gear for Lunar Lander[J].Spacecraft Engineering,2011,20(2):46-51.(in Chinese)
[4] 杨建中,曾福明,满剑锋,等.嫦娥三号着陆器着陆缓冲系统设计与验证[J].中国科学:技术科学,2014,44(5):440-449.YANG Jianzhong,ZENG Fuming,MAN Jianfeng,etal.Design and Verification of the Landing Impact Attenuation System for Chang’E-3 Lander[J].SciSin Tech,2014,44(5):440-449.(in Chinese)
[5] 杨建中,满剑锋,曾福明,等.一种着陆探测器铝蜂窝变形缓冲器:中国,ZL 201120551968.5[P].2012-09-26.YANG Jianzhong,MAN Jianfeng,ZENG Fum ing,et al.An A lum inum Honeycomb Impact Absorber of Lander:China,ZL 201120551968.5[P].2012-09-26.(in Chinese)
[6] 杨建中,曾福明,满剑锋,等.一种着陆探测器软着陆机构薄壁金属管变形缓冲器:中国,ZL200710083996.7[P].2011-10-26.YANG Jianzhong,ZENG Fum ing,MAN Jianfeng,etal.A Thin-wallMetallic Tube ImpactAbsorber of Soft Landing Gear of Lander.China,ZL200710083996.7[P].2011-10-26.(in Chinese)
[7] 杨建中,满剑锋,曾福明,等.一种着陆探测器软着陆机构缓冲器:中国,ZL200710080670.9[P].2012-02-22.YANG Jianzhong,MAN Jianfeng,ZENG Fuming,et al.An Impact Absorber of Soft Landing Gear of Lander:China,ZL200710080670.9[P].2012-02-22.(in Chinese)
[8] 杨建中,满剑锋,曾福明,等.“神舟”号飞船航天员座椅缓冲装置缓冲特性研究[C].中国宇航学会首届年会,中国宇航学会首届年会论文集.北京:中国宇航学会首届年会,2004:861-867.YANG Jianzhong,MAN Jianfeng,ZENG Fum ing,et al.Study on Seat Buffer Apparatus of Astronaut for SHENZHOU Spaceship[C].The 1st Annual Symposium of Chinese Society of Astronautics,Conference Proceedings of The 1st Annual Symposium of Chinese Society of Astronautics.Beijing:The 1st Annual Symposium of Chinese Society of Astronautics,2004:861-867.
[9] 凌道盛,蒋祝金,钟世英,等.着陆器足垫冲击模拟月壤的数值分析[J].浙江大学学报(工学版),2013,47(7):1171-1177.LING Daosheng,JIANG Zhujin,ZHONG Shiying,et al.Numerical Study on Impact of Lunar Lander Footpad against Simulant Lunar Soil[J].Journal of Zhejiang University(Engineering Science),2013,47(7):1171-1177.(in Chinese)
[10] 钟世英,黄根清,戚顺超,等.软着陆足垫与模拟月壤界面特性研究[J].岩土力学,2013,34(4):1058-1062.ZHONG Shiying,HUANG Gengqing,QIShunchao,et al.Interface Property between Soft Landing Foot Pad and Simulant Lunar Soil[J].Rock and SoilMechanics,2013,34(4):1058-1062.(in Chinese)