便携式无人机地面控制站设计与实现
2014-02-27李增彦李小民刘新海
李增彦,李小民,刘新海
(军械工程学院无人机工程系,河北 石家庄 050003)
便携式无人机地面控制站设计与实现
李增彦,李小民,刘新海
(军械工程学院无人机工程系,河北 石家庄 050003)
为实现无人机状态监视、飞行操纵及机载任务设备控制,设计并搭建便携式无人机地面控制站。规划系统整体设计方案,提出采用USB接口技术设计完成系统的外部控制模块,解决系统便于携带的问题;利用Google Earth技术实现无人机状态实时监视,增强数据可读性。通过无人机飞行控制实验,表明该系统具有便携、人机界面友好、实时性强等优点,并具有功能扩展性。
无人机;地面控制站;USB;Google Earth
0 引 言
无人机的控制操作只能由地面控制站(ground control station,GCS)的无人机操作人员来完成,地面控制站是整个无人机系统的“中枢神经”,无人机各项功能和任务的成功实现都离不开它,飞行数据的可视化也在地面控制站实现。
目前国内外无人机多种多样,对应的地面控制站结构和功能也因需求不同而各有差别,如安全可靠型[1]、多模式交互型[2]、智能监控型[3]、任务规划型[4]等,研究趋势也向着通用型、一站多机等[5]特点发展。
传统的地面控制系统结构复杂、体积巨大、易暴露目标等[6]特点使得便携式、轻量化、功能结构简洁等特点成为设计地面控制站的重要指标。同时传统方法中飞行状态数据在数字、图像化表达方式上存在可视化不强的问题。
本文针对以上特点设计一种便携式无人机地面控制站,采用USB接口实现即插即用的外部控制模式,同时将Google Earth用作无人机三维状态监视平台,并从硬件电路、软件构架与飞行控制实验3个方面对开发过程中的技术难题及解决方案进行了较为详尽的阐述。
1 系统整体框架
作为整个无人机系统的重要组成部分之一,地面控制站为完成其在装备操作中的任务,必须能够提供相应的功能。应实现功能的基本单元有飞行监控、任务监控、通信功能等。
系统设计思路是采用便携的外部输入设备以及人机交互界面的形式,通过无线通信设备实现遥控遥测指令的收发(包括飞行操纵、机载任务设备
控制以及无人机状态的监视等)和视频图像传输等功能[7]。
该系统采用图1所示的结构设计,主要由以下3部分组成:
(1)外部输入设备。由单片机STC12C5A60S2作为主控制器,完成外部摇杆、按键等任务控制面板的数据采集以及遥测指令的接收,同时发送遥控指令。
(2)无线通信设备。实现与无人机的远程无线通信,主要包括图像传输及数据链传输。
(3)人机交互界面。主要完成无人机飞行操纵(爬升、俯冲、左盘、右盘、大马力等)、机载任务设备控制(跟踪、扫描、焦距变化等)、数据可视化(经度、纬度、高度等)及三维监视功能等。
该系统通过外部输入设备将控制指令发送给无人机(交互界面可完成相似功能),无人机收到指令做相应的运动并将遥测数据及图像通过无线通信设备实时地传入地面控制站,系统经过解算及处理将相应信息显示于交互界面,并将三维状态显示于Google Earth中。
2 系统硬件平台关键模块设计
硬件平台直接反应了系统的体积、结构及可靠性。本文在外部输入设备中采用单片机STC12C5A60S2,它是STC Micro公司推出的完全集成的混合信号片上系统MCU,具有低成本、高可靠性等优点[8],是真正能独立工作的片上系统。其具有LQFP-44封装、高速A/D转换、最大40路I/O和两个串口,满足系统设计的要求。
其中硬件平台关键模块包括以下3部分。
(1)USB转串口电路
STC单片机下载程序不用编程器烧写,可以用宏晶公司提供的STCISP软件,通过串口下载。PL2303HX[9]是Prolific公司推出的RS232转USB(或者USB转RS232)接口的转换芯片,可提供一个RS232全双工异步串行通信装置与USB功能接口便利联接的解决方案。采用该方案节约了主机串口资源,不仅可以进行程序调试下载,而且能够完成遥控遥测数据串行通信,同时可以通过USB接口为单片机提供+5V工作电压,一举三得。PL2303HX外围电路如图2所示。
(2)自动冷启动电路
STC单片机下载必须冷启动(所谓冷启动,就是指单片机从完全断电状态,到通电启动的过程)。反复调试程序时需要多次下载,显得非常繁琐。本系统利用主控芯片STC15F104E进行自动冷启动电路设计。原理如下:单片机P3.3连接PL2303HX的TXD端,软件下载时会持续向单片机发送16进制0×7F,即可通过此信息判断下载命令,当持续接收50个0×7F时,将P3.4置0,经过三极管8050及光耦切断目标单片机电源,延迟1~2s后置1,实现自动冷启动。电路连接方式如图3所示。
(3)摇杆及按键数据采集
摇杆及按键是无人机遥控方式重要的输入设备,实时的数据采集及准确的指令是系统设计时考虑的关键问题之一。
控制杆采用高质量碳膜电位器,能精确控制X轴、Y轴、Z轴的三维方向和速度。该模块摇杆部分主要用来控制机载任务设备的两自由度旋转,按键部分控制激光测距机测距。其中摇杆数据都为电压值,因此利用单片机的高速A/D转换功能进行数据采集,并用软件滤波。指令对应关系如表1所示。矩阵按键主要是模拟真实装备中飞行操纵及任务控制面板的部分功能。考虑到单片机充分的I/O口资源,因此利用一一对应的按键方式采集数据,数据读取速度比扫描式矩阵键盘快。指令对应关系如表2所示。
3 软件功能设计
地面控制站软件结构是控制无人机正常执行任务的关键技术之一,直接关系到整个系统的功能。为实现系统功能,满足无人机系统对地面控制站实时性强、可靠性高、可移植性好、操作方便等要求,采用
VC++编写地面控制站应用程序,进行面向对象设计。软件结构采用模块化组件,既能满足实时性要求,又便于维护升级。
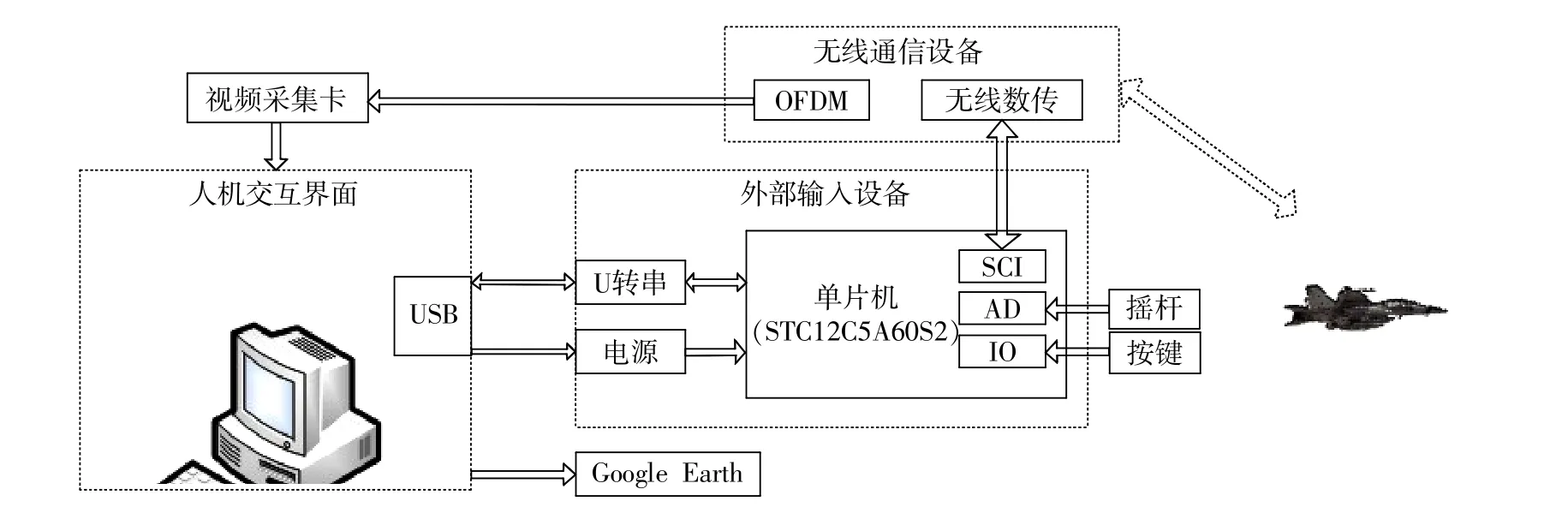
图1 无人机地面控制站系统总体结构图

图2 PL2303HX电路连接图

表1 摇杆指令对应表

表2 部分按键指令对应表
该系统软件结构根据模块化设计思路,主要包括:
(1)遥控遥测数据解算模块。
(2)飞行操纵及机载任务设备控制虚拟面板(飞行状态数据显示和Google Earth三维飞行姿态监视等)。
(3)遥测图像显示模块等。
整个系统程序流程如图4所示。
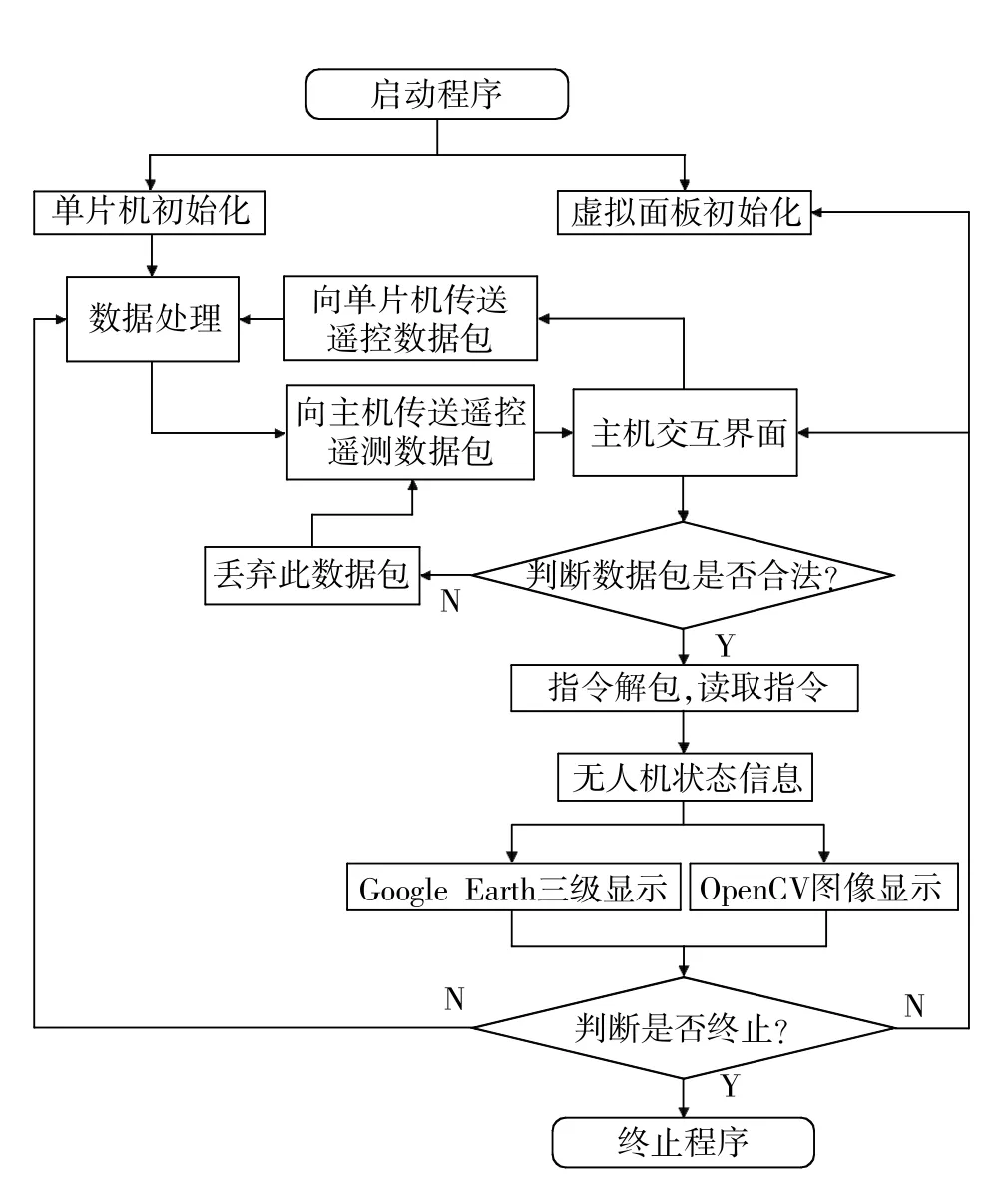
图4 系统程序流程图
各模块功能如下:
(1)遥控遥测数据解算模块。该模块主要完成遥控指令的发送编码以及遥测数据的解码工作,通信码速率为9600kb/s,周期为80ms。可靠的通信控制是无人机安全的保障,为了使系统具有更强的实时性,编码解码任务在主机上进行,同时针对数据传输中的误码、丢失数据等问题进行判别,保证系统工作的稳定性。
(2)虚拟面板。以面向对象的设计思路,采用Visual C++6.0基于对话框的表现形式进行虚拟面板设计,主要包括任务指令按键、飞行状态数据显示以及任务设备状态数据显示等。同时以COM组件的方式将Google Earth视图嵌入窗口中增强系统的直观性[10-11],这不仅能提高系统的可操作性,而且实时显示的动态3D效果也便于操作人员掌握当前设备状态。
(3)遥测图像显示模块。图像显示功能主要利用T510视频采集卡将摄像机实时图像数据进行捕捉,使用OpenCV进行图像处理及视频叠加功能,利用定时器将图像以50ms的速率显示于界面上而不引起停顿感,该功能可以实时的显示无人机侦查状态,同时能够实现图像处理、目标跟踪和校射等任务操作,便于后期功能扩展。
4 系统功能验证
4.1 系统调试
地面控制站系统调试分3个阶段进行:通过硬件调试,解决输入设备以及通讯连接的电路问题;软件调试包括外部输入数据采集、视频图像显示、遥控遥测指令编码和解码等,按照模块化设计思路先局部后整体的原则进行调试;最后进行实际飞行控制实验。
4.2 功能实验
为验证该无人机地面控制站的功能、稳定性和可靠性,进行飞行控制实验,为保证实验安全,选在安全的开阔地(东经114.502655°,北纬38.102831°周围两公里),利用本文地面控制站对缩比型无人机进行控制及操作,通过起飞、爬升、盘旋、任务监控、降落等一系列全过程连续实验,飞行过程无失控现象,数据传输速率小于0.5s,数据传输误码率小于1%,地面控制站软件界面显示效果如图5所示。

图5 地面控制站软件界面显示效果
5 结束语
本文以便携式无人机地面控制站为研究对象,基于USB接口,设计了外部输入控制模块,完成了外部控制功能,同时设计了友好的软件交互界面,并将无人机飞行状态以三维直观的形式展现在地面控制站中。对于系统的设计,在满足系统各种功能的前提下,保证了系统的稳定性和实时性,具有便携、小巧、成本低等优点。该系统主要用于无人机的控制,而且可以与模拟训练系统进行对接,方便进行功能扩展。
[1]Blickensderfer B,Buker T J,Luxion S P,et al.The design of theUAS ground control station:Challenges and solutions for ensuring safe flight in civilian skies [C]∥Proceedings of the Human Factors and Ergonomics Society 56th Annual Meeting,2012,56(1):51-55.
[2]Maza I,Caballero F,Molina R,et al.Multimodal interface technologies for UAV ground control stations[J]. Journal of Intelligent&Robotic Systems,2010,57(1):371-391.
[3]Perez D,Maza I,Caballero F,et al.A ground control station for a Multi-UAV surveillance system[J].Journal of Intelligent&Robotic Systems,2013,69(1):119-130.
[4]Damilano L,Guglieri G,Quagliotti F,et al.Ground control station embedded mission planning for UAS[J]. Journal of Intelligent&Robotic Systems,2013,69(1):241-256.
[5]周焱.无人机地面站发展综述[J].航空电子技术,2010,41(1):1-6.
[6]宁成军,史忠科.一种小型无人机地空跟踪监视系统设计与实现[J].测控技术,2011,30(2):31-34.
[7]马俊.基于Google Earth的无人机地面站监控系统[D].南京:南京航空航天大学,2011.
[8]边树海,马斌,韩中华.基于STC12C5A60S2单片机的变频恒压供水系统的设计方法[J].电机与控制应用,2012,39(1):43-46.
[9]题原,宋飞,刘树东,等.基于nRF905的无线温湿度检测与传输系统设计[J].化工自动化及仪表,2011,38(4):404-407.
[10]唐勇,刘昌忠,吴宏刚.基于Google Earth的三维航迹监视及六自由度飞行仿真[J].计算机应用,2009,29(12):3385-3387.
[11]田兆锋,闫楚良.Web方式下飞机飞行实测数据可视化方法[J].振动、测试与诊断,2011,31(12):738-741.
Design and implementation of portable UAV ground control station
LI Zeng-yan,LI Xiao-min,LIU Xin-hai
(Department of UAV Engineering,Ordnance Engineering College,Shijiazhuang 050003,China)
In order to monitor UAV status,control flight and payloads,portable UAV ground control station is designed and built.The overall system design is planned.External control module,which can solve the portable problem,is designed with USB interface technology.UAV state is real-time monitored using Google Earth technology which can enhance the readability of the data.Experimental results of UAV flight control show that the system has advantages of portable,friendly man-machine interface,well real-time property and strong expandable ability,etc.
UAV;ground control station(GCS);USB;Google Earth
V249.12;V279;TP277.2;TN977
:A
:1674-5124(2014)01-0119-04
10.11857/j.issn.1674-5124.2014.01.030
2013-02-15;
:2013-04-03
李增彦(1987-),男,河北石家庄市人,硕士研究生,专业方向为无人机地面控制系统。