基于HLA的火控雷达网融合控制系统仿真研究
2014-02-27李成玉杜伟明彭建怡张文泉
李成玉,杜伟明,彭建怡,张文泉
(1.武汉军械士官学校光电装备系,湖北 武汉 470035;2.武汉军械士官学校雷达系,湖北 武汉 470035)
基于HLA的火控雷达网融合控制系统仿真研究
李成玉1,杜伟明2,彭建怡1,张文泉1
(1.武汉军械士官学校光电装备系,湖北 武汉 470035;2.武汉军械士官学校雷达系,湖北 武汉 470035)
为提高火控雷达的战场生存能力,研究通过组网技术降低雷达信号截获概率的方法。根据设定作战场景,介绍火控雷达网的工作过程,给出融合控制系统的结构及动态执行过程,设计基于高层体系结构的火控雷达网融合控制系统仿真软件,以此作为平台验证火控雷达组网理论的正确性。最后,通过RTI平台进行仿真实验,结果表明:仿真系统可以有效模拟火控雷达网的数据融合处理和雷达参数控制,组网系统能够延长火控雷达被敌方侦察系统的截获时间。
火控雷达;雷达组网;高层体系结构;仿真;RTI平台
0 引言
对于火控雷达来说,对目标的连续可靠跟踪是其最基本的使命,也是相关武器系统完成后续战术任务的基本保证[1]。但是,由于雷达采用持续照射的方式,火控雷达信号极易被电子侦察设备截获和定位,从而引导武器系统对火控雷达进行摧毁,这严重影响着火控雷达的战场生存能力。
我国有大量的现役火控雷达装备,一方面在技术上缺少有效的对抗反辐射武器的技术措施;另一方面在战术上缺少有效的对抗反辐射武器的运用手段[2]。这种状况使得当前我国现役火控雷达对抗反辐射武器的能力非常有限,在面对反辐射武器的攻击时难以保证自身的安全。雷达组网系统通过利用信息的冗余性和互补来克服单部雷达的不足,可以实现系统内情报资源的共享,完成对每部雷达的实时指挥控制,增加实战的可靠性[3-4]。国内对雷达组网的研究集中在防空警戒雷达,国外的研究相对成熟,但是由于保密等原因,技术资料比较匮乏。
因此,如何采用科学有效的方法对火控雷达网的作战效果进行评估是一个亟待解决的问题。高层体系结构(high level architecture,HLA),是一种开放
的、面向对象的体系结构,在军事领域的应用越来越广泛[5]。本文基于HLA的技术特点,设计了火控雷达网的融合控制系统,用于仿真火控雷达网工作参数的控制过程,并对火控雷达网在电子对抗中的作战性能进行评估,从而验证火控雷达组网理论的合理性。研究成果可以为现役火控雷达有效地对抗各类反辐射武器(包括反辐射导弹、反辐射无人机及电子侦察机等)提供理论支持,对提高现役火控雷达整体的生存能力和作战效能有重要的军事价值和实际意义。
1 火控雷达网工作原理
火控雷达组网系统由M部火控雷达和一个融合控制中心组成,每部雷达的工作状态和工作参数都由融合控制中心进行统一控制和协调,各部火控雷达通过通信链路实现与融合控制中心之间的信息传递,以此保证多雷达间的数据共享。任一时刻只有一部雷达处于辐射工作状态,其余雷达进行静默跟踪。当此雷达停止工作后,由融合控制中心选择另一部雷达继续工作[6]。
如图1所示,假设在k时刻火控雷达j(j=1,2,…,M)处于间歇辐射工作状态,其余雷达处于静默跟踪状态。雷达j将其对目标的实时跟踪测量数据送到数据融合控制,融合控制中心根据雷达的测量数据对目标的运动轨迹进行滤波和预测。处理后的数据一方面送到相关武器系统,供火力打击使用;另一方面送到其余处于间歇状态的雷达,供其天线调整以完成对目标的静默跟踪。跟踪精度评估环节和低截获性能评估环节则分别对当前的跟踪精度和当前的低截获性能进行计算和评估。通过对当前跟踪精度的计算,采用自适应脉冲间隔策略选择下一时刻的最优脉冲间隔,间歇辐射控制环节根据该参数控制雷达j的脉冲发射间隔。同时,通过对雷达低截获性能的评估控制交替选通信号,以选择下一时刻工作的雷达。当雷达j停止工作后,通过交替选通信号的控制选择雷达j+1间歇工作以继续跟踪目标。以此循环,各雷达在融合控制的协同控制下,共同完成对目标的交替间歇式跟踪。
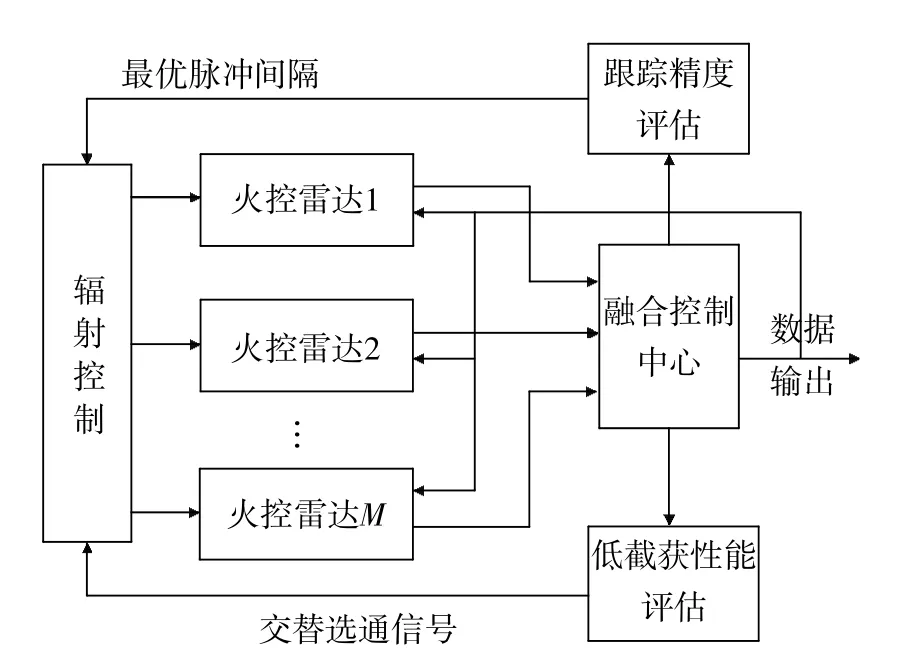
图1 火控雷达网交替间歇式目标跟踪过程示意图
2 作战场景想定
以3部火控雷达网为例构建仿真系统,想定场景如图2所示。
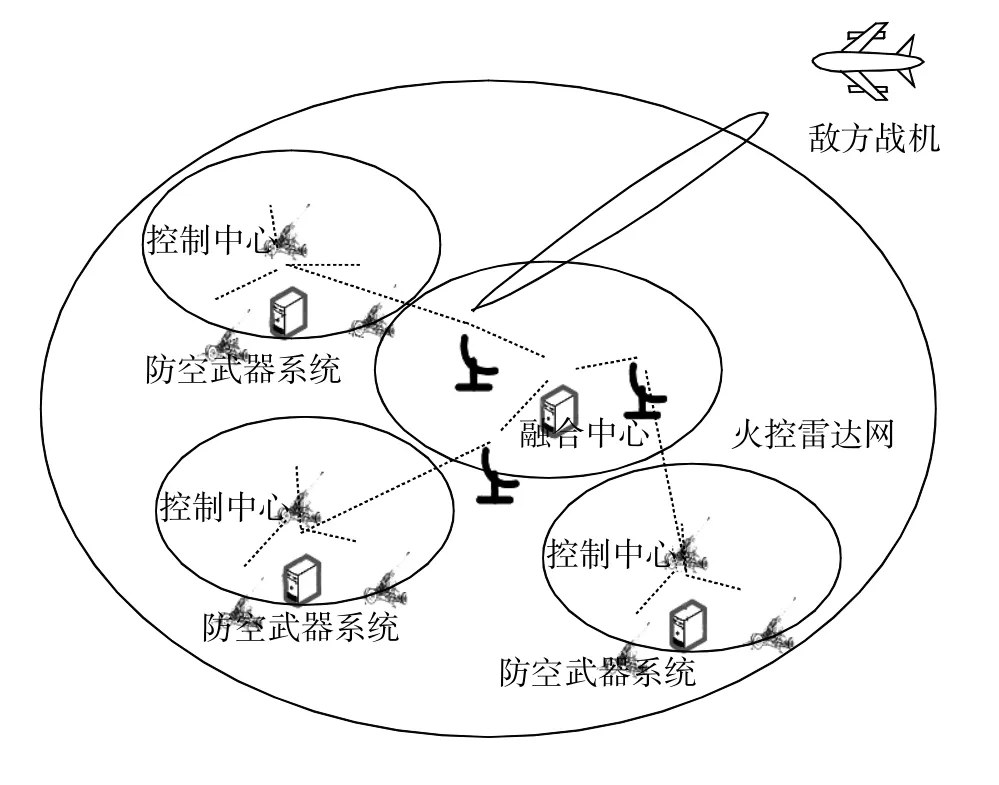
图2 仿真系统想定场景
防御方的防空系统由警戒雷达、火控雷达和防空武器等组成,进攻方的战斗机对防御方的雷达进行探测定位。当战斗机处于防空系统中警戒雷达的探测范围内,而处于火控雷达探测范围之外时,火控雷达不工作,由警戒雷达对战斗机进行前期的警戒跟踪,并为火控雷达提供侦察机的粗略位置信息。当战斗机进入防空系统中火控雷达的探测范围时,火控雷达突然开机工作,依据警戒雷达提供的侦察机位置信息,在较短时间内完成对战斗机的稳定跟踪,同时为防空武器提供精确的战斗机位置信息,供其火力拦截。火控雷达开机工作之后,战斗机的侦察系统在告警系统的触发下迅速对火控雷达信号进行搜索、识别、截获和分析,以获得火控雷达各项工作参数,对雷达进行定位,进而发射反辐射导弹对雷达进行火力摧毁。为了避免防空火控雷达信号在短时间内被战斗机截获,融合控制中心控制火控雷达网,采用交替间歇辐射的工作方式完成对目标的连续跟踪。在保证火控雷达对侦察机精确跟踪的同时,尽量延长侦察机对雷达定位所需的时间,从而完成防空武器系统对侦察机的有效打击。
3 仿真系统设计
火控雷达网间歇式目标跟踪原理如图3所示。具体工作过程为:由目标模块产生目标模拟运动航迹,融合控制中心模块通过雷达工作参数的设定来选择处于工作状态的雷达,并通过对脉冲重复周期
的选择来控制雷达的辐射状态。雷达进行间歇工作获得目标测量数据,将测量数据传送到融合控制中心模块进行数据融合、跟踪滤波等处理,并根据处理结果选择下一时刻雷达的工作参数,以控制雷达工作,如此循环进行,交替选择组网系统内的火控雷达进行间歇工作,以实现对目标的连续跟踪。同时,将处理结果传送到效能评估模块,效能评估模块将这些数据和来自目标模块的雷达信号截获判定、目标真实航迹等数据进行一系列处理,对系统的整体性能进行评估。
融合控制成员对组网雷达融合控制中心的功能进行仿真。订购雷达成员生成的量测数据信息,通过融合处理,生成目标的位置信息和雷达网跟踪精度,并对雷达下一个周期的工作参数进行调整,向雷达成员公布目标位置、脉冲宽度、工作频率、开关机信号、雷达信号形式等。对融合控制成员进行类划分,将具有相同属性的方法提取出来,并对类与类之间的关系进行分析,可分为以下8类。
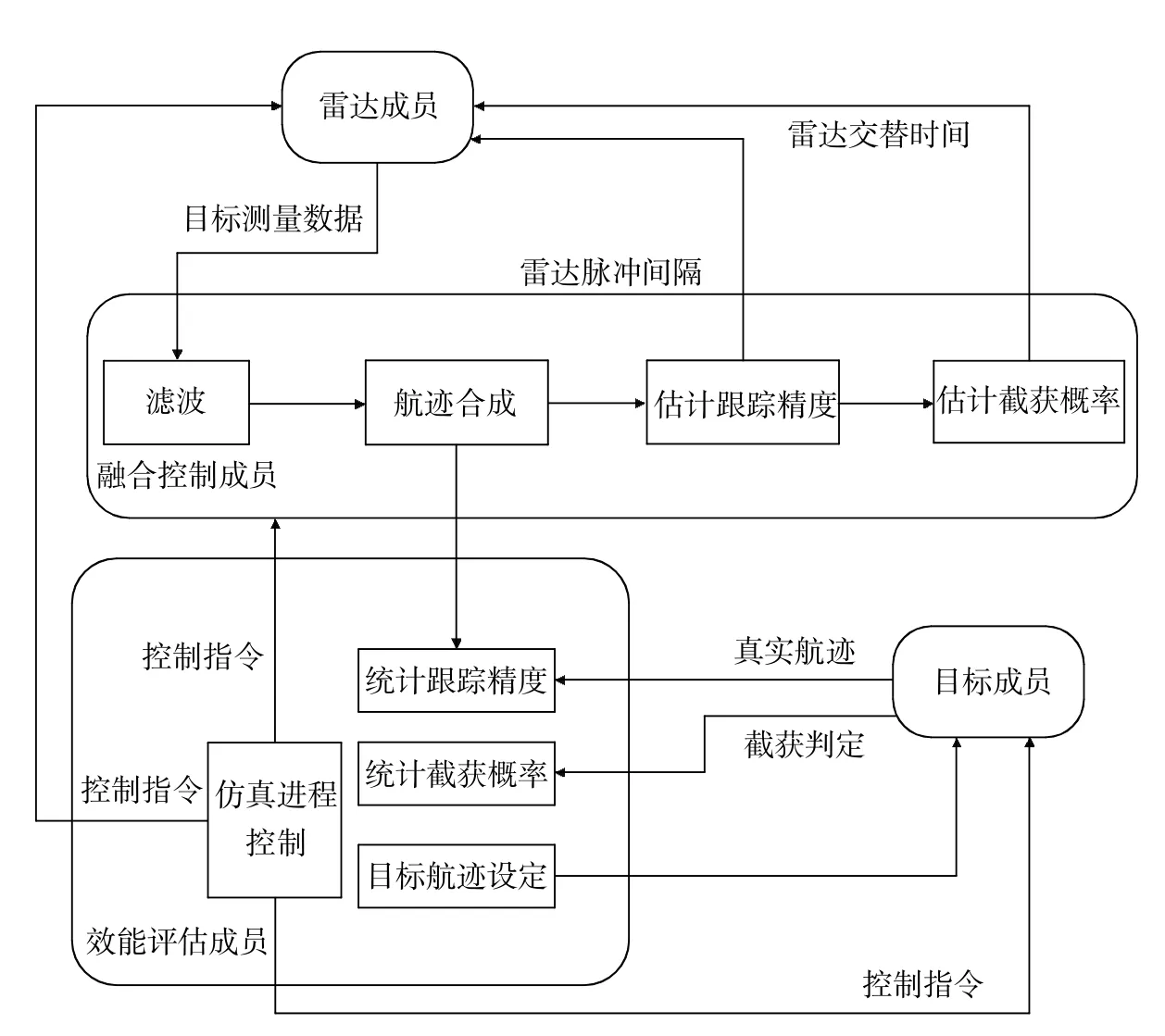
图3 火控雷达网工作原理图
RTI基类:此类主要提供运行支撑环境(run-time infrastructure,RTI)的基本服务,包括联邦管理、声明管理、对象管理、时间管理、所有权管理和数据分发管理等功能。联邦管理是指对一个联邦执行的创建、动态控制、修改和删除的过程。声明管理是为联邦成员提供类层次上的表达(公布或订购)机制,在HLA中,联邦成员通过声明管理服务向联邦表明自己可以公布或需要订购的对象类和交互类[7]。对象管理是在声明管理的基础上,实现对象实例的注册/发现、属性值的更新/反射、交互实例的发送/接收以及对象实例的删除/移走等功能。时间管理的主要任务是使仿真世界中事件发生的顺序与真实世界中事件发生的顺序一致。仿真运行过程中,联邦成员和RTI将利用所有权管理服务来转移实例属性的所有权,在联邦执行生命周期的任一时刻,一个实例属性最多只能被一个联邦成员拥有,只有唯一拥有实例属性所有权的联邦成员才有权更新该实例属性的值[8-10]。数据分发管理是在实例属性层次上增强联邦成员精简数据需求的能力,减少仿真运行过程中无用数据的传输和接收,提高仿真运行的效率。
RTI接口类:此类是RTI基类的派生类,负责实现联邦的具体创建工作,成员通过回调接口函数,使用RTI提供的服务。RTI接口的工作主要在仿真线程中进行,其中主要包括创建并加入联邦、声明公布/订购关系、注册对象实例、请求时间推进、更新和反射对象属性值、发送和接收交互、退出联邦等。
融合控制类:实现了数据的融合处理和雷达工作参数的控制。如对3部雷达的测量数据进行融合,估计侦察机对雷达信号的截获概率和当前的目标跟踪精度,计算出下一时刻的雷达最优脉冲间隔,控制雷达的工作时间。
数据公布类:实现了对数据的公布,即表明要公布的数据类型、数据长度等,并对数据进行更新等。
数据订购类:实现了对数据的订购,即表明要订购的对象、数据类型、数据长度等,并对数据进行更新等。
文件管理类:实现了对数据的记录,负责创建文件,将数据写入文件,完成读取文件、修改文件、格式转换和删除文件等功能。
显示类:实现了对数据的实时显示,如目标三坐标位置、斜距、俯仰角、方位角、雷达脉冲间隔和系统工作时间等。
定时器类:实现了数据处理和更新过程中的定时功能,如启动时钟、停止时钟等,负责仿真进程的开始和停止。
顺序图主要描述系统各组成部分之间交互的次序,展示了对象之间的动态协作关系[11]。使用顺序图,可以描述执行特定用例,会触发哪些交互,以及这些交互以何种次序发生。融合控制成员从整个仿真系统的启动开始,工作流程如下:
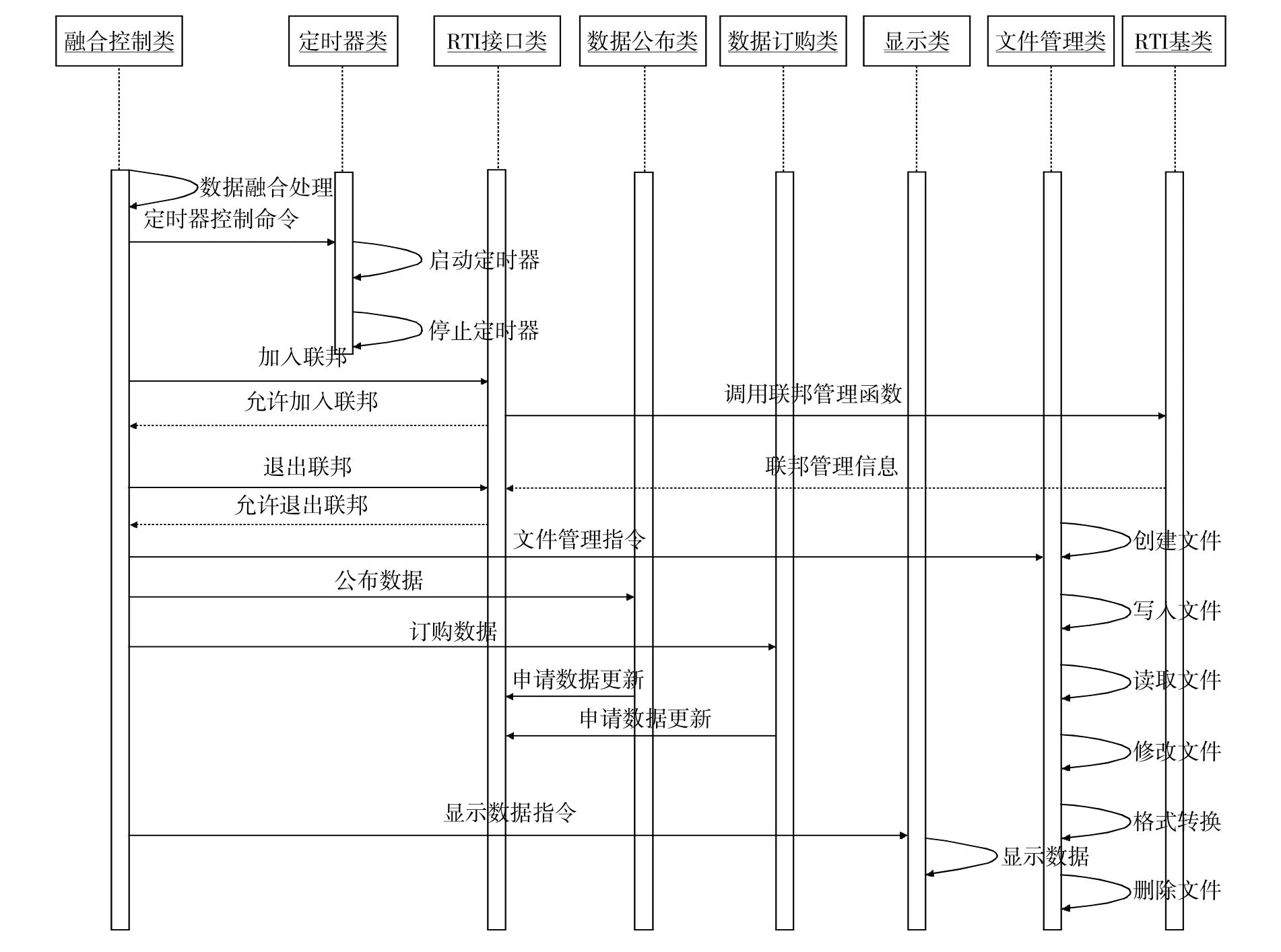
图4 控制成员顺序图
(1)运行融合控制程序,点击“加入联邦”,通过调用RTI接口函数使用RTI的声明管理、对象管理函数,将该成员加入到仿真系统中,等待开始仿真的指令。
(2)开始仿真,进入主线程,通过调用RTI接口函数使用RTI的数据分发管理服务,订购其他联邦成员的数据。
(3)对订购的数据进行融合处理,通过调用RTI接口函数使用RTI的数据分发管理服务,把数据公布给其他联邦成员。
(5)收到停止仿真命令后停止仿真进程,融合控制成员退出联邦。
根据以上的操作流程创建顺序图如图4所示,该图显示了仿真流程融合控制成员运行的动态过程。
4 仿真分析
通常火控雷达对目标的跟踪距离相对较近,对于高速运动的反辐射导弹载机来说,在有限的跟踪距离内,持续跟踪时间不会太长。因此,在仿真过程中设定目标跟踪时间为t=100s。将开发的软件加入到火控雷达网仿真联邦中,在仿真过程中存储对目标的测量值和滤波值进行存储,并实时计算出3部雷达的截获概率,都保存到文本文档中。
仿真结束后,调用Matlab读取存储的文本,画出目标的测量轨迹和滤波轨迹,如图5所示。可以看出,组网系统能够准确地对目标进行跟踪。
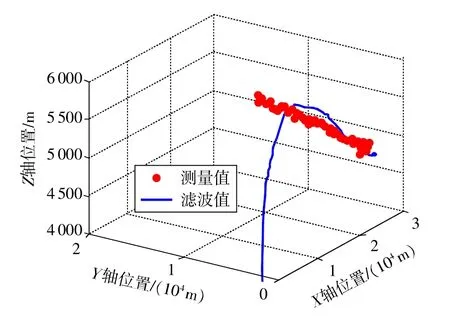
图5 测量轨迹和滤波轨迹
3部雷达的截获概率如图6所示。由图可知,组网系统在有效的跟踪目标时,能够延长雷达被敌方侦察系统截获的时间,提高了先敌发现目标的概率,给指挥高炮对敌方目标进行打击提供了充足的时间。
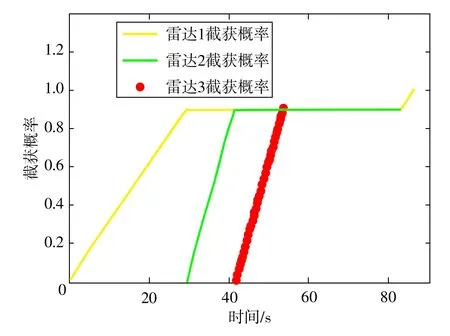
图6 截获概率
5 结束语
火控雷达在跟踪敌方目标时必须要尽量延长被侦察系统截获的时间,在敌方发射反辐射导弹攻击之前指挥高炮对目标进行打击。本文研究了3部火控雷达组网系统交替辐射的原理,并开发了基于高层体系结构的融合控制系统,仿真结果证明了该方法的有效性。由于战场环境的复杂性,如何进一步优化组网结构,更好地发挥组网优势,实现与反辐射武器的对抗有待深入研究。
[1]王德纯,丁家会,程望东,等.精密跟踪测量雷达技术[M].北京:电子工业出版社,2006.
[2]徐宏.基于组网的火控雷达间歇辐射抗反辐射导弹研究[D].石家庄:军械工程学院,2011.
[3]赵强.雷达组网系统的目标数据融合方法研究[D].镇江:江苏科技大学,2009.
[4]李志强,李成玉,杨小龙,等.组网火控雷达低截获性研究[J].中国测试,2013,39(1):84-87.
[5]徐忠富,黄柯棣,王国玉,等.基于HLA的电子信息作战训练仿真系统分析与设计[J].系统仿真学报,2008,20(2):336-340.
[6]熊久良.基于组网的火控雷达间歇式目标跟踪技术研究[J].现代雷达,2011,33(8):13-16.
[7]曾艳丽.基于HLA的联邦开发过程的研究和应用[D].成都:电子科技大学,2004.
[8]窦志武.基于高层次体系结构(HLA)分布交互仿真的应用方法研究[D].大连:大连理工,2006.
[9]郭文刚,宋善德.基于HLA的分布式通信网络仿真技术[J].计算机仿真,2004(8):91-94.
[10]马立元,董光波.基于HLA的分布式交互仿真技术及其应用[J].计算机工程,2003(22):103-105.
[11]杨京礼.光电对抗试验系统软件平台开发[D].哈尔滨:哈尔滨工业大学,2008.

对于一般嵌入式应用,若设tmul=0.000015s、tadd= 0.000001s、tabs=0.000005s,可求得TCFDSE比Tcheby显著减少约54%。
4 结束语
本文提出CFDSE标签数估算方法,无需或仅需少量乘法运算实现RFID标签数估算。估算时间比切比雪夫不等式法显著减少约54%,估算误差小于5%,适用于计算能力不强的应用场合,对提高RFID标签识别效率、信息获取速度具有重要作用,促进RFID产业发展。
范坚强脸色一暗,刚才那个接到命令的男子朝一杭逼过来,一把抓住他的衣领,提起来,说:“你他妈别得寸进尺!”范坚强朝他挥挥手,看看一杭说:“说来听听。”
参考文献
[1]李慧,张治国.不定长RFID标签反碰撞识别算法[J].计算机工程,2010,36(20):241-243.
[2]Zhu X,Mukhopadhyay S K,Kurata H.A review of RFID technology and its managerial applications in different industries[J].Journal of Engineering and Technology Management,2012,29(1):152-167.
[3]郭亮,鹿剑.煤矿井下人员定位系统的设计[J].中国测试,2011,37(5):59-62.
[4]Vogt H.Efficient object identification with passive RFID tags[M].Springer Berlin Heidelberg,2002:98-113.
[5]Kodialam M,Nandagopal T.Fast and reliable estimation schemes in RFID systems[C]∥ Proceedings of the 12th annual international conference on Mobile computing and networking,2006:322-333.
[6]颜元,武岳山,熊立志.一种新型多标签估算方法[J].计算机应用研究,2012,29(3):930-932.
[7]Vogt H.Multiple object identification with passive RFID tags[C]∥IEEE International Conference on Systems,Man and Cybernetics,2002:6-9.
[8]Chen W T.An accurate tag estimate method for improving the performance of an RFID anti-collision algorithm based on dynamic frame length ALOHA[J].IEEE Transactions on Automation Science and Engineering,2009,6(1):9-15.
[9]Floerkemeier C.Bayesian transmission strategy for framed ALOHA based RFID protocols[C]∥IEEE Internat-ional Conference on RFID,2007:228-235.
Simulation system design for fire control radar network based on HLA
LI Cheng-yu1,DU Wei-ming2,PENG Jian-yi1,ZHANG Wen-quan1
(1.Department of Optics and Electronics Equipment,Wuhan Ordnance N.C.O.Academy,Wuhan 470035,China;2.Department of Radar,Wuhan Ordnance N.C.O.Academy,Wuhan 470035,China)
In order to improve the survival probability of fire control radars,the technique of radar network was studied.For the hypothesized scene,the working process of fire control radar network was introduced,the structure of data fusion and control system was designed and the dynamic process of simulation was given.Simulation software based on high level architecture was developed as a platform to test the fire control radar network theory.And simulation experiments were carried out with run time infrastructure(RTI).The results indicate the software can simulate the data fusion and parameter control of fire control radar network and the network system can effectively delay the intercept time of fire control radar by enemy reconnaissance system.
fire control radar;radar network;high level architecture;simulation;RTI
TJ810.3+7;TN95;TP398.028;TP391.9
:A
:1674-5124(2014)03-0137-05
10.11857/j.issn.1674-5124.2014.03.036
2013-09-17;
:2013-11-21
李成玉(1988-),男,河南南阳市人,助教,硕士,研究方向为导航、制导与控制。