一种基于旋转编码器的车辆行车状态无线监测装置
2014-02-27杨洪扣李丽宏
杨洪扣,刘 军,李丽宏
(1.太原理工大学信息工程学院,山西 太原 030024;2.山西省质量技术监督局,山西 太原 030002)
一种基于旋转编码器的车辆行车状态无线监测装置
杨洪扣1,刘 军2,李丽宏1
(1.太原理工大学信息工程学院,山西 太原 030024;2.山西省质量技术监督局,山西 太原 030002)
开发一种基于旋转编码器的车辆行车状态无线监测装置,采用增量式旋转编码器作为速度测量元件,基于STM32F103VET6处理器与嵌入式实时操作系统μC/OS-II进行系统监测装置的软硬件设计。比较目前几种常用的车辆测速方式的优劣,叙述车辆行车状态无线监测装置的工作原理及其架构,速度测量元件、监测装置的软硬件子系统的设计要点,给出软件流程图和行车状态实时监测曲线。根据现场的实验测试表明:该系统不仅架构简单、使用方便,而且具有良好的实时性、可靠性和测速分辨率等。
旋转编码器;测速;动态称重;无线传输;USB;μC/OS-II
0 引 言
影响动态汽车衡称量精度的因素有温度、湿度、电源、干扰、称量速度等,目前已经给出了这些影响因子的测试方法[1-2],但却未指出车辆行驶加速度对动态称重结果的影响。经过现场观察,发现车辆以一定的加速度通过秤台时,测量出现了较大的误差。针对上述问题,本文开发一种车辆行车状态无线监测装置,对过秤时的车辆速度进行实时采集,并对采集到的速度数据进行微分运算,计算出车辆行驶的加速度,便于研究车辆加速度与动态称重结果的关系,同时为未来规范动态汽车衡的检定工作提供实验依据。
1 车辆测速方案比较
随着车辆速度监测技术的不断进步,越来越多的车辆测速设备面世。目前,运用于车辆测速的主要有激光测速;雷达测速;双路称重传感器测速3种方式。
(1)激光测速[3]。通过激光器对被测车辆发射激光光束并接收激光光束的反射波,记录时间差trt,结
合激光在空气的传播速度νair来计算激光器与被测车辆之间的距离d=νairtrt/2。激光测速是对被测车辆发送连续的激光光束,连续进行一系列固定时间间隔Δt的激光测距di-1,di,di+1,…,得到被测车辆相对于激光器随时间变化的位置序列,从而获得被测车辆移动的速度ν=(di+1-di)/Δt。
实际测量时,激光器的测量方向与被测车辆的行驶方向存在一定的夹角,因此测得速度与车辆实际行驶速度并不相等,误差较大。
(2)雷达测速[4]。雷达测速主要利用多普勒效应原理来测定车辆行驶速度,可以安装在被测车辆上。测速时,雷达天线以与地面一定角度θ向路面发送频率为f1的电磁波,并接收到由路面反射回来的频率为f2的电磁波,由于车辆处于行驶状态,使得f1与f2存在一个多普勒位移fd:

式中:C——光速3×108m/s。
因此,车辆行驶速度为

雷达测速效果较好,但大部分雷达探测器依赖于进口,成本较高,而且测速时还应防止测速雷达与其他雷达或通信设备之间的干扰[5]。
(3)双路称重(或压力)传感器测速。双路压力传感器测速是在地面上沿公路方向安装两路压力传感器,距离为L,当行驶的车轮压上第一路压力传感器时,控制单元的定时器开始计时,直到车轮压上第二路压力传感器时停止计时,时间差为ΔT,则车辆的行驶速度ν=L/ΔT。双路压力传感器测速方式采集的是车辆行驶过一段较长距离的速度,速度数据较为单一,无法测出车辆过秤台时各个瞬时的速度,无法满足研究动态称量结果与加速度关系的要求。
本文提出一种基于旋转编码器的车辆行车状态无线监测装置的设计方案,经验证不仅测量分辨率高,速度采集实时性好,成本低,而且使用简单方便、易于安装。
2 系统原理及架构
较其他测速方法,旋转编码器在性能、价格、体积、重量、数字化方面具有较大的优势,已经成为检测速度、旋转角度及线性位置的重要手段[6]。增量式旋转编码器是利用光电转换原理输出方波脉冲,其旋转的方向及数量可以被后续控制单元判断与计数,因此不仅抗干扰能力强,而且构造的电路简单方便。在该设计中采用增量式旋转编码器进行测速,整个系统原理及其架构如图1所示。
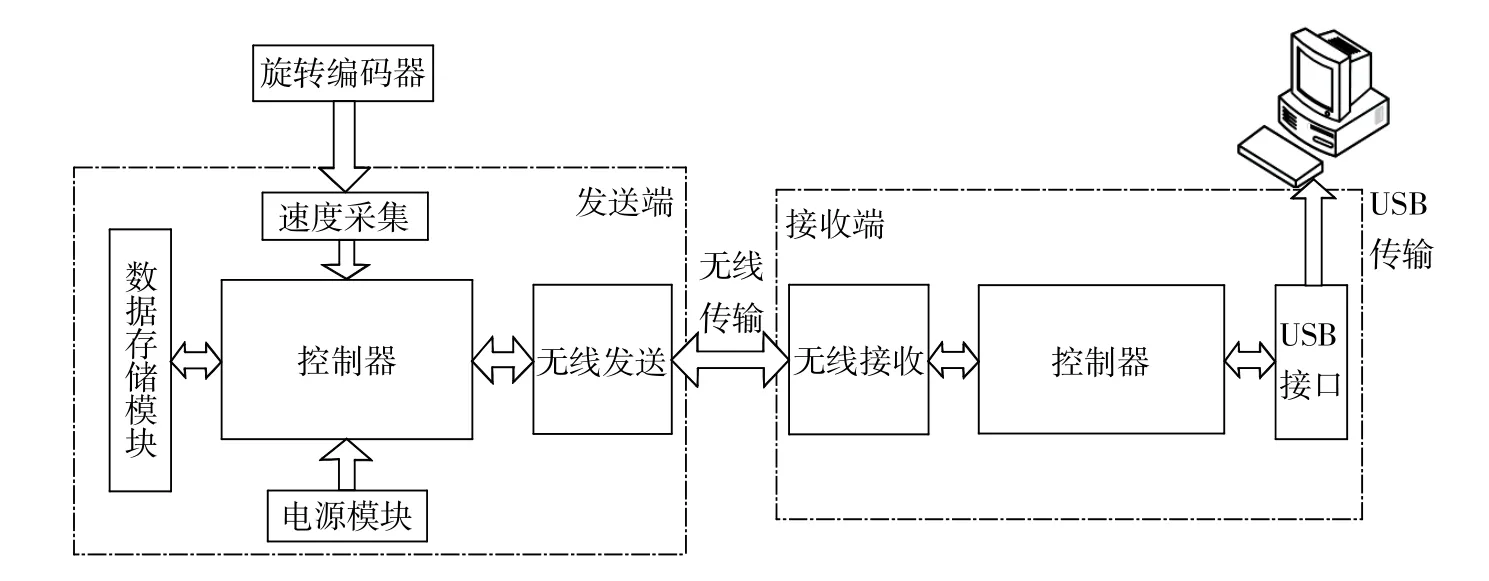
图1 车辆行车状态无线监测装置原理图
该系统由发送端与接收端两部分组成,发送端安装于被测车辆上,接收端用于车外监测人员实时观测被测车辆行车状态。发送端负责对增量式旋转编码器输出的脉冲进行计数,然后将脉冲数量打包后通过无线传输模块传送给接收端,同时通过数据存储模块对采集的数据进行保存;接收端负责接收来自发送端的数据,并将其转换成USB协议数据包,通过USB接口传输给上位机,由上位机软件对采集的数据进行处理,计算出速度及加速度,并进行实时显示与保存。
3 测速单元
旋转编码器担负着将机械位移量转换成电学量的职能,一般分为增量式旋转编码器和绝对式旋转编码器,增量式旋转编码器比绝对式旋转编码器更适合于角位移与角速度测量场合[7]。增量式旋转编码器每旋转一周产生一系列脉冲,脉冲数量的多少表示角位移的大小。
该系统选用欧姆龙E6C2-CWZ6C旋转编码器作为测速元件,其供电电压为5~24V直流电源,输出信号A、B、Z三相,每旋转一周输出1000个脉冲。由于其输出的信号为集电极开漏输出,所以应在信号输出端外接上拉电阻连至+5V电压。后续控制单元通过对旋转编码器的信号线(A相或B相)输出的脉冲进行计数,可计算出其旋转的角位移。
旋转编码器的机械固定装置通过六角螺母与车身挡板连接,测速轮通过联轴器与旋转编码器相连,并且同轴。当被测车辆行驶时,车轮由于摩擦力的作用带动测速轮转动,由于旋转编码器与测速轮同轴,所以其转动步调与测速轮一致,同时输出一系列脉冲。
设旋转编码器每旋转一周产生的脉冲数为N,后续处理单元每t秒进行一次脉冲计数,其数量为n,车辆t秒行驶的距离S为

式中:d——测速轮直径。
那么车辆行驶的速度ν为

设ν1,ν2,ν3,…,νi-1,νi分别为第t1,t2,t3,…,ti-1,ti秒内采集到的速度,则车辆在第ti秒时的加速度ai为

后续处理单元根式(4)、式(5)即可计算出车辆行驶的速度及加速。

该系统中测速轮直径d为0.1m,旋转编码器每旋转一周产生的脉冲数N为1000,每间隔0.01s对旋转编码器产生的脉冲进行一次计数,即t为0.01。代入式(6)得:

式(7)说每个脉冲代表的车辆速度增量为0.0314m/s,即系统可分辨的最小速度为0.0314m/s。
该系统主要用于监测车辆通过秤台时的实时速度与加速度,被采集到的数据点越多,监测装置性能越高。设动态汽车衡秤台的宽度为L,当车辆以速度ν通过秤台时,系统可采集到的速度数据点个数n′为
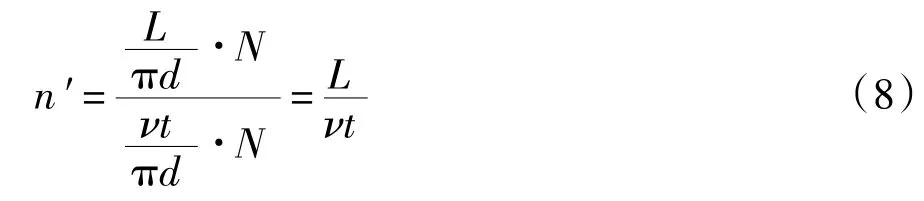
动态汽车衡的秤台宽度可选为0.9m,车辆行驶速度可选为5,10,15,20,25km/h等,代入式(8),即可算出不同速度通过秤台时,系统可采集到的数据点个数如表1所示。

表1 不同速度时可采集到的数据点数量
由上述分析可知,采用旋转编码器作为车辆行车状态无线监测装置的测量元件,完全满足本系统的测量要求。
4 系统硬件设计
车辆行车状态无线监测装置硬件系统由发送端与接收端两部分组成。发送端与接收端通过无线射频通信的方式来实现信息交互。发送端将采集的数据传送给接收端,再由接收端转发给上位机做进一步的数据处理。
4.1 发送端
发送端主要由控制单元、速度采集模块、数据存储模块、无线通信模块、供电回路等部分组成。
系统采用意法半导体公司(ST)推出的基于ARM Cortex-M3内核的STM32F103VET6处理器为核心控制单元,最高工作频率为72MHz。该处理器性能高,外设资源丰富,因此特别适合高速、大容量的数据采集系统[8],同时便于移植嵌入式实时操作系统。
旋转编码器外部接有电源线、地线、屏蔽线以及(A、B、Z)相线等。该设计中采用+5V给旋转编码器供电,将A相线连至STM32F103VET6的外部计数器端口,并通过上拉电阻接至+5 V。如图2所示,BAT54S具有钳位功能,从而对后级电路具有保护作用。电阻R30与电容C50组成RC滤波电路,可有效滤除信号线中的高频干扰。
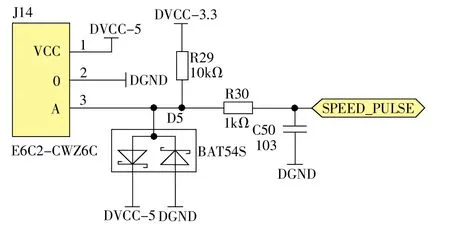
图2 速度采集模块电路原理图
数据存储模块以Micro SD卡作为存储器,存储容量大,可在无线通信信号较差时,将采集的数据保存在存储器中。
NRF905芯片可工作在433/868/915MHz等3个ISM频道,它由频率合成器、接收解调器、功率放大器、晶体振荡器和调制器组成,无需外加声表滤波器,Shock-Burst工作模式,自动处理字头和CRC(循环冗余码校验),使用SPI接口与微控制器通信,配置方便[9]。
4.2 接收端
接收端功能模块由控制单元、无线通信模块及USB通信模块组成。
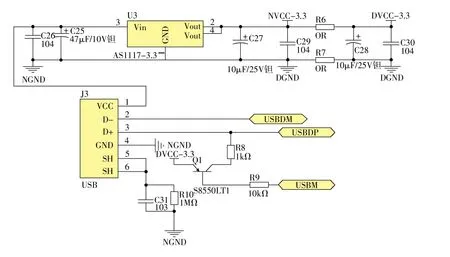
图3 USB通信模块电路原理图
由于STM32F103VET6处理器内部集成了USB2.0控制器,使接收端电路大大简化。另外,采用 USB接口与上位机进行通信,不仅插拔方便,而且传输速率高,满足系统对海量数据传输速率的要求,从而保证行车状态监测的实时性。USB通信模块的电路原理如图3所示。AS1117-3.3用于将上位机的USB口提供的+5V电压转换为+3.3 V电压,从而为接收端其他功能模块供电。
5 系统软件设计
系统软件以嵌入式实时操作系统μC/OS-II为核心,采用多任务机制,通过任务调度与任务监视,具有较好的实时性与安全性[10]。
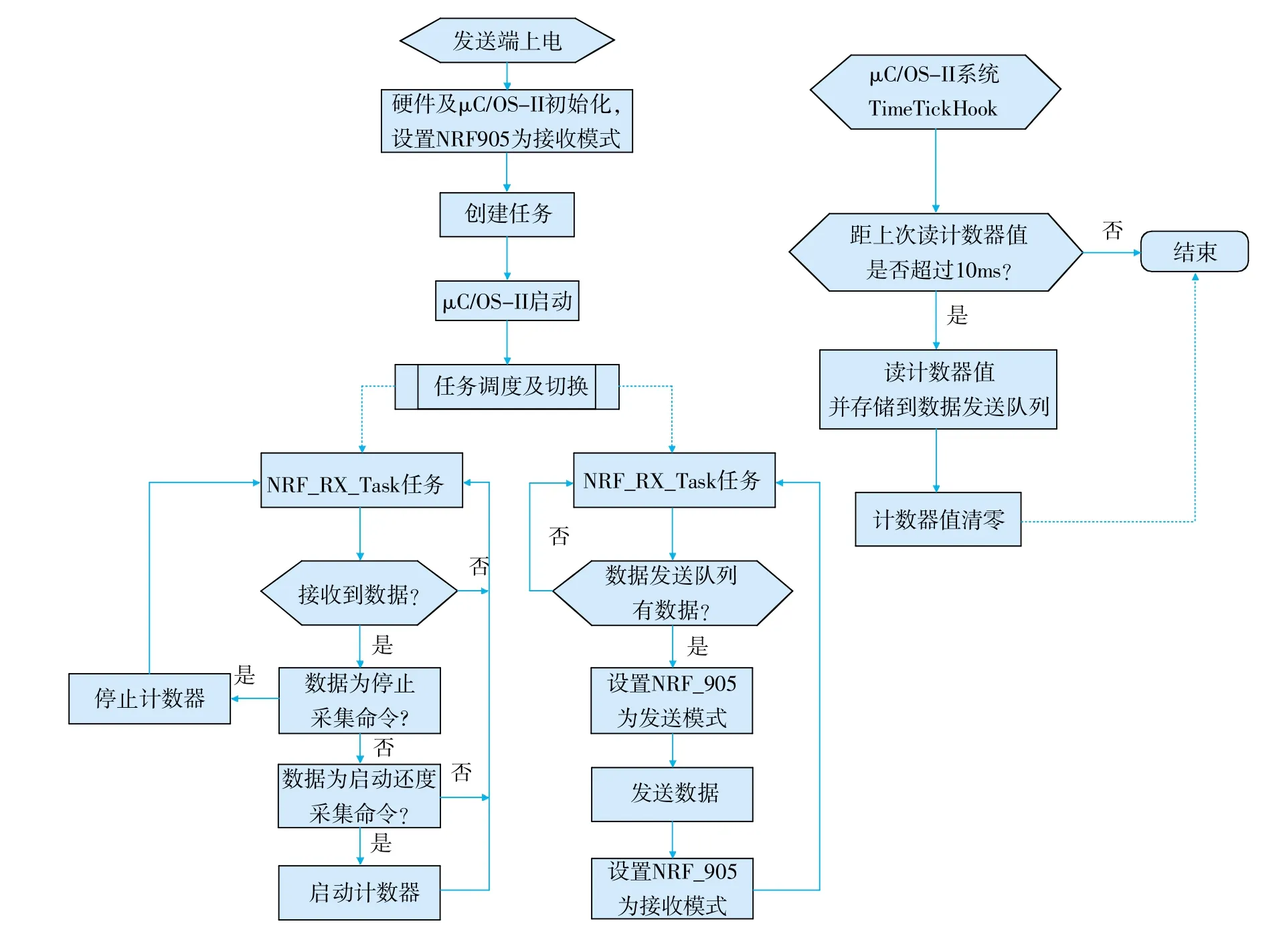
图4 发送端软件流程图
发送端软件流程如图4所示。μC/OS-II系统时钟节拍设置1ms,并在时钟节拍勾子里每10ms读取一次计数器的值。发送端创建NRF_RX_Task与NRF_TX_Task两个任务。NRF_RX_Task负责定时检查无线芯片是否接收到来自接收端发送的指令并执行;NRF_TX_Task定时检查数据发送队列里面是否有数据,并及时发送。NRF905芯片除正处于发送数据的状态外,其他任何时间都被设置为接受模式,便于及时接受来自接收受端的命令。发送端软件中创建了nrfsemp与qsemp两个信号量。nrfsemp用于多任务同时访问无线模块时实现互斥,保证资源有序利用;qsemp保证多任务同时访问数据发送队列时实现互斥,增加了系统的安全性。
接收端创建了NRF_RX_Task、NRF_TX_Task以及USB_TX_Task等3个任务。NRF_RX_Task任务定时检查是否接受到来自发送端传送的数据,并将其存储于USB数据发送队列;USB_TX_Task任务检查到USB数据发送队列有数据后立即将数据发送给上位机;NRF_TX_Task任务定时检查是否有来自上位机传来的数据,并及时将其转发给发送端。同发送端一样,接收端软件中也创建了nrfsemp与qsemp两个信号量,用于保证不同任务访问同一资源时实现互斥。
6 实验测试
为验证车辆行车状态无线监测装置设计的合理性及可靠性,对其进行了实验测试。旋转编码器被安装在特制的机械固定装置中,通过测速轮与一辆中型货卡车轮紧密啮合。监测装置发送端放置在货卡驾驶室,采用12V锂电池供电。接收端通过USB接口与上位机相连,发送端与接收端的天线位于空阔的地带。测试时,中型货卡车的车速从0km/h加速到20km/h。通过上位机软件对车辆的行车状态进行实时监测。车辆行车状态无线监测装置的实时监测曲线见图5,图中实时显示货卡车行车的实时速度及加速度。
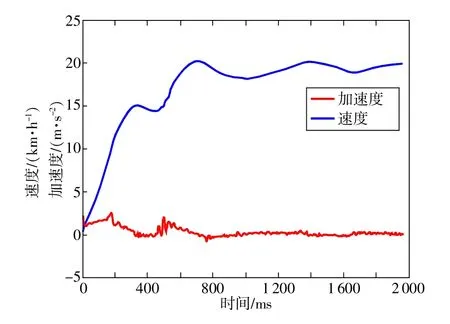
图5 行车状态实时监测曲线
调试中发现,车辆行车状态无线监测装置实时监测到的速度及加速度波动较大,曲线较陡,这是由于系统为了保证实时性采样间隔时间过于短暂造成的,但是如果增加采样间隔时间,会使得行车状态监测的实时性较差,单位时间内获得的数据点较少,不利于研究车辆行驶加速度与动态称重结果的关系。因此在上位机软件中对采集的数据采用了滑动平均滤波算法,滤后的速度及加速度曲线较为平滑,较能真实地反应车辆的行驶状态,同时又具有较高的实时性。
7 结束语
文中介绍了一种基于旋转编码器的车辆行车状态监测装置的设计方案,该方案中采用增量式旋转编码器作为测速元件,成本低,使用方便,而且具有较高的测速分辨率。基于STM32F103VET6处理器与μC/OS-II系统的软硬件设计,提供了系统的性能及可靠性,为研究动态称量结果与车辆加速度之间的关系以及规范动态称重的检定工作提供了实验依据。
[1]刘军,李丽宏,朱旭.浅析加速度对动态称重结果的影响[J].软件,2012,33(2):120-122,126.
[2]GB/T21296—2007动态公路车辆自动衡器[S].北京:中国标准出版社,2007.
[3]蔡常青,孙桥,张跃,等.机动车激光测速仪检测技术探讨[J].中国计量,2008(2):58-59.
[4]陈同林,樊海博.雷达技术在现代公路中的应用[J].西安邮电学院学报,2004,9(3):34-37.
[5]罗善峤,梁敬春.浅谈汽车测速技术的采用[J].装备制造技术,2010(2):160-161.
[6]常春,胡瑜,董彬.光电旋转编码器的研究与应用[J].仪表技术与传感器,2001(12):34-35.
[7]王磊集,张红梅.增量式光电旋转编码器及在角减速度测量中的应用[J].机电产品开发与创新,2005,18(5):115-118.
[8]田明,徐平,黄国辉,等.基于STM32和μC/OS-II的USB数据采集系统[J].机电工程,2012,29(4):482-485.
[9]李长庚,李新兵,张宇鑫,等.基于无线射频技术的传感器温度采集系统[J].仪表技术与传感器,2008(3):31-33.
[10]叶敦范,薛国将.基于嵌入式操作系统的数据采集系统[J].微计算机信息,2007,23(4-2):7-8,82.
Wireless monitoring device of vehicle driving state based on rotary encoder
YANG Hong-kou1,LIU Jun2,LI Li-hong1
(1.College of Information Engineering,Taiyuan University of Technology,Taiyuan 030024,China;2.Shanxi Province Bureau of Quality and Technical Supervision,Taiyuan 030002,China)
A wireless device was developed for monitoring the vehicle driving state based on rotary encoder.The system used an incremental rotary encoder as the speed measuring element,and the software and hardware of the monitoring device were designed with the STM32F103VET6 processor and the embedded real-time operating system μC/OS-II.The merits of several common velocimetry ways for vehicle at present were compared.The working principle and the architecture of the wireless monitoring device were described,and the design points of the speed measurement and the subsystems of software and hardware were also described.The software flowcharts and the driving real-time status monitoring curve were given.Experimental results from field tests showed that the system not only was easy to use and had simple architecture,but also had the advantages of high real-time,reliability and velocity resolution.
rotary encoder;velocimetry;dynamic weighing;wireless transmission;USB;μC/OS-II
TP274;U461.91;U491;TP391.45
:A
:1674-5124(2014)03-0080-05
10.11857/j.issn.1674-5124.2014.03.022
2013-03-26;
:2013-05-28
杨洪扣(1987-),男,江苏盐城市人,硕士研究生,专业方向为散入式系统与单片机。