基于区间分析的发动机悬置系统稳健优化设计*
2014-02-27于德介
谢 展,于德介,李 蓉,吕 辉
(湖南大学,汽车车身先进设计制造国家重点实验室,长沙 410082)
前言
汽车发动机悬置系统是汽车的关键弹性支承元件,对汽车的平顺性、安全性和舒适性等有着重要影响。从被动隔振的角度看,它能隔离地面传递过来的低频振动,从而保证发动机稳定工作;从主动隔振的角度看,它能阻止发动机产生的振动向车架(车身)传递,从而降低车内振动与噪声。提高发动机悬置系统的隔振性能及其稳健性,对于提高整车的NVH性能具有重要意义。
针对参数不确定问题,研究人员已经提出了3种数学模型,即随机模型、模糊模型和区间模型。文献[1]中基于多目标优化与稳健设计理论,提出了一种汽车悬架系统的多目标随机优化方法。文献[2]中利用响应面法和区间分析方法构建悬置系统的优化模型,并采用连续二次规划方法对其进行优化。文献[3]中采用区间数学中的区间数描述悬置刚度的不确定性,提出了计算悬置系统固有频率和解耦率的区间分析方法。但目前悬置系统的不确定性研究均只针对悬置刚度,没有考虑悬置元件安装位置的不确定性,但是它对隔振性能的影响更明显[4],设计中必须予以考虑。
本文中针对汽车发动机悬置系统参数的不确定性问题,基于区间分析理论,将稳健设计与多目标优化相结合,对发动机悬置系统进行稳健优化设计。在区间数学的基础上建立发动机悬置系统稳健优化模型,应用加权方法将多目标优化转化成单目标优化,以克服多目标优化的计算困难;采用多层次遗传算法解决稳健优化模型中的优化嵌套问题。悬置系统传递到车身的动反力大小直接表征了系统隔振性能的优劣,动反力的波动过大不但达不到优化的目的,而且会影响发动机的工作性能。为兼顾动反力的优化及其稳健性,该方法以动反力及其变化范围最小为目标函数,即悬置系统优化性能的评价标准,以固有频率的合理配置为约束条件,以悬置刚度为设计变量,并考虑悬置系统参数的不确定性,将悬置刚度和悬置位置的变化范围设为区间参数,对悬置系统进行优化,达到良好的效果。
1 悬置系统的固有频率和动反力
1.1 悬置系统的动力学模型
汽车发动机悬置系统的固有频率一般在30Hz以下,而汽车动力总成各部分的一阶弹性模态频率一般都在60Hz以上,两者相差甚远。因此,在对悬置系统进行隔振降噪优化时,发动机和车架可以被视为刚体。于是,汽车发动机在空间中的运动具有6个自由度,即沿3个相互垂直的轴线方向的往复直线运动和绕此3根轴线的回转运动,这样发动机悬置系统有6个振动模态以及相应的6个固有频率。悬置系统的6自由度动力学模型[5]如图1所示。
根据拉格朗日方程,6自由度汽车发动机悬置系统的振动微分方程为
(1)
其中{X}=(xyzθxθyθz)
式中:{X}为系统的广义坐标;[M]为系统的质量矩阵;[K]为系统的刚度矩阵;[C]为系统的阻尼矩阵。
由于橡胶悬置元件的阻尼很小,且对固有频率影响不大,所以阻尼可以忽略不计。因此式(1)可以改写为
(2)
根据以上汽车发动机悬置系统动力学模型,在测得发动机的总质量、转动惯量和惯性积以及各悬置的刚度、安装位置和角度后,便可求得发动机悬置系统的模态参数。
1.2 悬置系统的固有频率配置
(3)
式中:i为气缸数;n为发动机转速;τ为冲程数。

另外,从避免共振的角度来看,要求对系统的固有频率进行合理配置。发动机悬置系统的各阶振动频率应有一定间隔,一般要求最小差值在1Hz左右[6]。
1.3 悬置系统的动反力
汽车发动机在怠速工况且不考虑阻尼的情况下,悬置系统的强迫振动微分方程为
(4)
式中:{Fe}为系统所受的简谐激励力矢量。
悬置系统受迫振动的稳态解为
{Udyn}=([K]-ω2[M])-1{Fe}
(5)
于是,第i个悬置传递给车身的动反力[5]为
{fi}={-[ki] [ki][ri]}{Udyn}
(6)
式中:[ki]为第i个悬置在全局坐标系中的刚度矩阵;[ri]为第i个悬置位置坐标的反对称阵。
因此,怠速工况下悬置系统传递给车身的总动反力为
(7)
式中:fxi、fyi、fzi为第i个悬置在怠速工况下动反力的3个分量。
作为汽车的最主要振源,发动机传递到车身的动反力大小是悬置系统隔振性能的直接指标,其值越低则表征系统隔振性能越好。此外,动反力的波动范围过大会使发动机工作环境不稳定,影响发动机的工作性能,故应控制动反力的波动范围。
2 基于区间分析的稳健优化设计
在汽车发动机悬置系统的确定性优化设计中,相关参数和设计变量都是确定性数值,其优化模型为
(8)
式中:f(X)为目标函数;gi(X)为约束函数;n为约束的个数;X为悬置刚度;S为设计空间。
然而,在工程实际中,汽车零部件在生产制造、安装使用和汽车行驶环境中都存在着大量的不确定性。而参数的细微偏差或波动则可能导致系统性能大的波动,甚至导致系统失效。因此,在悬置系统的优化设计过程中,必须考虑悬置参数的不确定性而进行稳健设计。稳健设计通过调整变量的取值及其容差,使系统性能在参数发生一定变动的情况下仍能满足设计要求。与确定性优化相比,稳健设计进行了不确定性分析,更好地反映了悬置元件的实际情况,使悬置系统的设计与工程实际相吻合。针对参数的不确定性问题,区间理论近年来得到了广泛的关注。由区间理论建立的汽车发动机悬置系统不确定性优化模型为
(9)
式中:f(X,U)为目标函数;gi(X,U)为约束函数;n为约束的个数;U为表示悬置位置的区间参数;UL和UR分别为区间参数的上下限;X为悬置刚度,取为设计变量;S为设计空间。
在式(9)中,目标函数和约束由于区间参数设计变量的不确定性,其取值也是一个区间。文献[7]中根据序关系提出:在工程实际中,不但要求目标函数的设计目标值要小,且要求其取值范围也要小。因此,目标函数应为
(10)
其中
(11)
式中:m(f(X,U))为目标函数的设计目标值;w(f(X,U))为目标函数的取值区间;fR(X,U)与fL(X,U)分别为目标函数取值的上下限。
由式(10)和式(11),式(9)所示的不确定性优化问题可转换成一个多目标的确定性优化问题。对于多目标优化问题,直接进行优化会给计算带来困难,必须对其进行相应的处理。本文中采用加权法,即将多目标优化问题通过加权转化成单目标优化问题,以便于优化计算。加权处理后的汽车发动机悬置系统不确定性稳健优化模型为
(12)
式中:X为悬置刚度;XL与XR为悬置刚度取值的上下限;α为加权系数,其取值范围为0~1。
从式(10)可知,基于区间分析的不确定性优化问题,既要求得目标函数的目标值,也要求得目标函数的最小值,这就产生了优化嵌套问题。本文中采用遗传算法对稳健优化模型进行多层次全局优化计算,以稳健优化模型的目标函数为遗传算法的适应度函数,其寻优过程分为两步:首先,以悬置刚度为设计变量,在其设计空间内产生第一层次初始种群;然后,以第一层次初始种群中的个体和悬置位置参数为区间变量,在其变化区间内产生第二层次初始种群代入适应度函数计算;最终,通过上述迭代寻优计算得到稳健可靠的优化解。
基于区间分析的汽车发动机悬置系统稳健优化设计流程如图2所示。
3 数值算例
对图1所示的某轿车发动机悬置系统进行稳健优化设计,该车发动机的布置方式是斜置式,并采用四点支撑方式。悬置系统的设计参数有悬置刚度、位置和安装角度,但由于悬置位置和安装角度涉及到整车尺寸设计,不易做出调整,因此选择悬置刚度作为设计变量(共12个),悬置位置(共12个)作为区间参数进行优化。优化前发动机悬置系统的刚度值和惯性参数值分别如表1和表2所示。

表1 优化前各悬置的静刚度值 N/mm

表2 发动机悬置系统的惯性参数值 kg·mm2
该车发动机为直列式四缸四冲程发动机,怠速转速为900r/min,主要激励力为2阶往复惯性力,根据式(3)计算得其激励频率为30Hz。从隔振的角度出发,根据1.2节可算得悬置系统固有频率的取值范围应为4~21Hz。从避免共振的角度出发,各阶固有频率之间的差值应在1Hz以上。以悬置系统固有频率的合理配置为优化模型的约束条件,可表示为
(13)
本文中以动反力及其波动范围最小为目标函数,考虑到悬置刚度不能太“软”也不能太“硬”,其取值区间为50~305N/mm,则悬置系统的确定性优化模型为
(14)
考虑到悬置元件由于生产制造、安装和测量过程中的不确定性,取位置参数的变化范围为5mm,并且取加权系数为0.5,则悬置系统的稳健优化模型可表示为
(15)
对悬置系统初始模型进行模态参数和动反力计算,结果如表3所示。由表可见:1阶与2阶、3阶与4阶固有频率很接近,差值小于1Hz,从1.2节的分析可知,悬置系统容易发生共振;且悬置系统的动反力比较大,达到了287.28N;动反力的波动区间亦较大,变化范围为48.33N。因此,须对此悬置系统进行优化。
悬置系统确定性优化后各悬置的静刚度值如表4所示,优化后的结果如表3所示。从表3可知,优化后系统各阶频率之间的差值增大,都在1Hz以上,符合频率合理配置的要求;动反力也得到较大改善,最小值只有185.10N,降幅达到了35.6%。但若考虑到悬置刚度的不确定性,假定其变化范围为其优化值的10%。在这个波动范围内,对悬置系统的动反力进行稳健性分析,计算得到其变化区间为[184.87,253.96],波动幅度达到了最优值的37.3%,说明即使不考虑悬置位置的不确定性,确定性优化结果的稳健性也很差。因此,须对此悬置系统进行稳健优化设计。
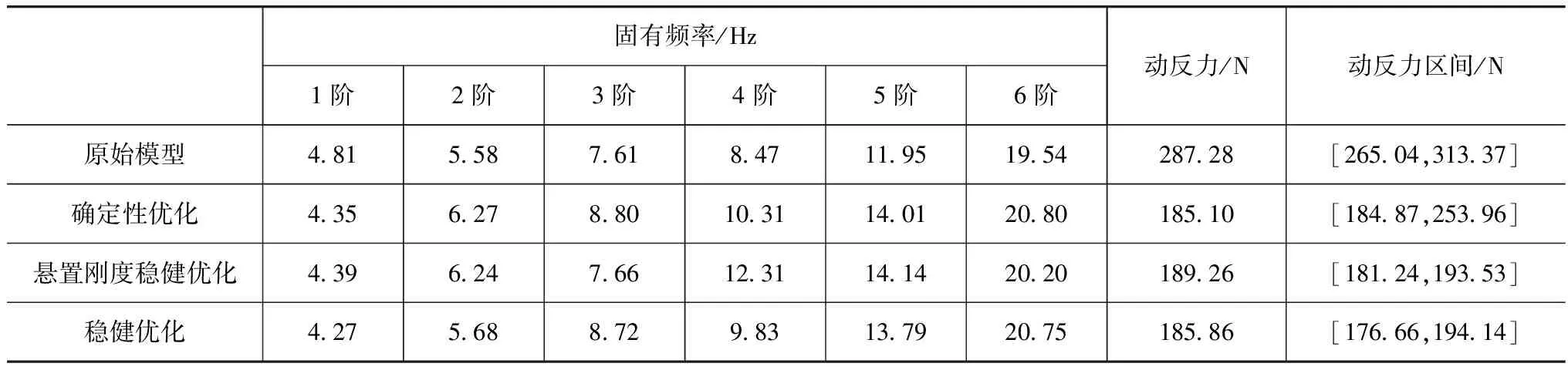
表3 悬置系统优化前后参数对比
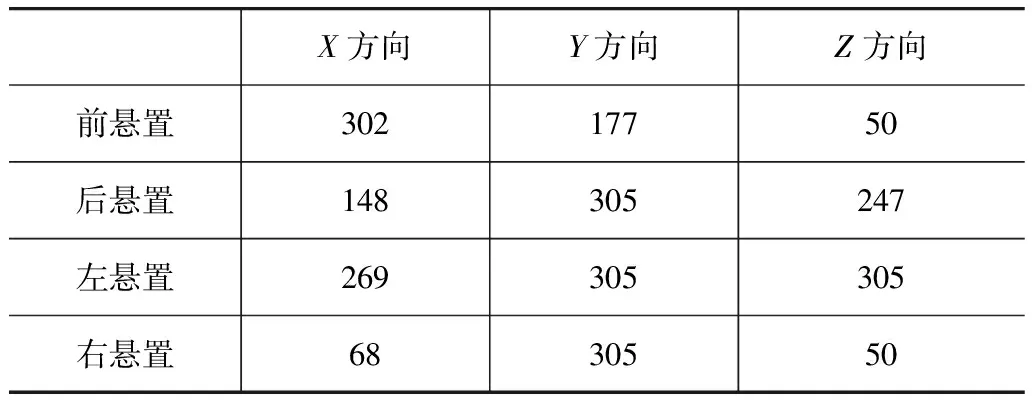
表4 确定性优化后各悬置的静刚度值 N/mm
稳健优化后的静刚度值如表5所示,优化后的结果如表3所示。从表3可知,优化结果满足频率合理配置要求,且动反力的变化范围降至最优值的6.49%,稳健性得到了提高,但动反力有一定的增大。若考虑悬置位置在5mm的范围内波动,得到动反力的变化区间为[178.52,203.41],动反力的变化范围为其最优值的13.2%,比刚度稳健优化设计的动反力变化区间大一倍多。可见,悬置位置参数对悬置系统的影响比悬置刚度要明显。因此,须同时考虑悬置系统的悬置刚度和悬置位置参数的不确定性。
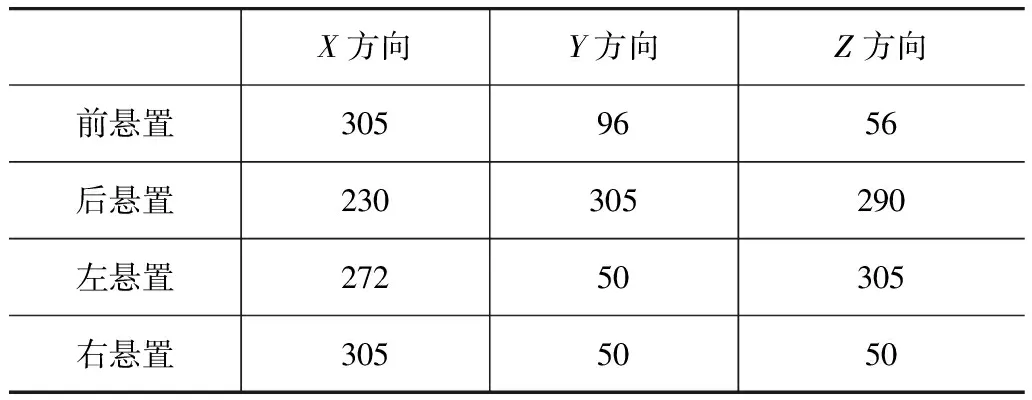
表5 刚度稳健优化后各悬置的静刚度值 N/mm
由于汽车发动机悬置位置参数是通过测量得到的,且悬置系统并不是在一个静态的环境中工作,因此必须考虑二者引起悬置位置参数的不确定性,假设悬置系统位置参数取值在测量值附近的变化范围为5mm。另外由于悬置元件的不确定性,其刚度值也会有一定的波动,假设其变化范围为目标值的10%。根据式(15)算得优化后的各悬置的静刚度值如表6所示,优化后系统固有频率及动反力结果如表3所示。从表3可知,优化后系统固有频率满足合理配置的要求;与悬置刚度稳健优化的结果相比,其动反力目标值进一步降低,且其变化区间也进一步缩小,其波动幅度为目标值的9.4%,稳健性得到了提高,满足稳健设计要求。
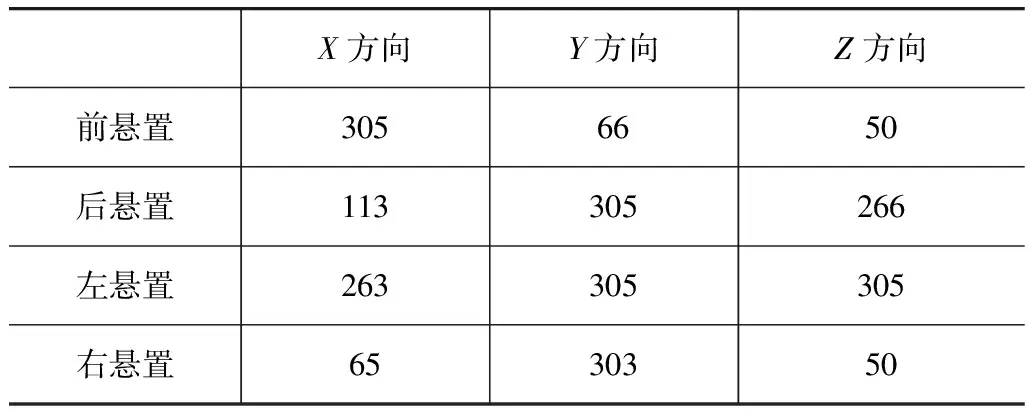
表6 稳健优化后各悬置的静刚度值 N/mm
4 结论
(1) 在区间分析理论的基础上,将稳健优化设计与多目标优化设计相结合,应用遗传算法,对悬置系统进行稳健优化设计。该方法在对悬置刚度进行寻优的同时,还考虑了悬置刚度和悬置位置参数的不确定性,从而在实现优化的同时提高了悬置系统优化结果的稳健性。
(2) 对某轿车的发动机悬置系统进行稳健优化设计,结果表明:在固有频率满足合理配置要求的同时,稳健优化设计不仅大幅降低了悬置系统的动反力,且动反力的变化范围也明显缩小,说明该方法能有效用于悬置系统的优化设计。
[1] Massimiliano Gobbi,Francesco Levi,Giampiero Mastinu.Multi-objective Stochastic Optimization of the Suspension System of Road Vehicles[J].Journal of Sound and Vibration,2006,290(3-5):1055-1072.
[2] 包健,成艾国,何智成,等.区间响应面悬置固有频率匹配研究[J].噪声与振动控制,2011,31(2):21-24.
[3] 吴杰,周胜男.动力总成悬置系统频率和解耦率的稳健性优化方法[J].振动与冲击,2012,31(4):1-7.
[4] 刘丹,侯之超.动力总成悬置设计中惯性参数的灵敏度分析[J].汽车工程,2007,29(10):884-888.
[5] 周冠南,蒋伟康,吴海军.基于总传递力最小的发动机悬置系统优化设计[J].振动与冲击,2008,27(8):56-58.
[6] 樊逸斌.基于灵敏度分析的悬置系统设计及优化[J].上海汽车,2010(6):17-20.
[7] Jiang C,Han X,Liu G R,et al.A Nonlinear Interval Number Programming Method for Uncertain Optimization Problems [J].European Journal of Operational Research,2008,188(1):1-13.
[8] 吴杰.区间参数振动系统的动力优化[J].力学学报,2003,35(3):373-376.
[9] 翁建生,张斌,汪洋.汽车动力总成的区间模糊多目标优化[J].现代车用动力,2006(3):28-31.
[10] Hiroshi Ito,Hiromitsu Ohmori,Akira Sang.Analysis of Robust Performance with Multiple Objectives[J].Systems and Control Letters,1995,25(2):141-149.
[11] Jiang C,Han X,Guan F J,et al.An Uncertain Structural Optimization Method Based on Nonlinear Interval Number Programming and Interval Analysis Method[J].Engineering Structures,2007,29(11):3168-3177.
[12] David Moens,Dirk Vandepitte.Interval Sensitivity Theory and Its Application to Frequency Response Envelope Analysis of Uncertain Structures[J].Computer Methods in Applied Mechanics and Engineering,2007,196(21-24):2486-2496.
