基于行驶工况识别的纯电动汽车续驶里程估算*
2014-02-27尹安东路瑞刚
尹安东,赵 韩,周 斌,江 昊,路瑞刚
(1.合肥工业大学机械与汽车工程学院,合肥 230009; 2.中国汽车工程学会,北京 100055)
前言
与普通燃油汽车相比,电动汽车在排放和能源合理利用方面具有很大的优势,但纯电动汽车的续驶里程短、能量补充速度慢,制约了其推广普及。为改变这一状况不仅需要开发能量密度高的动力电池,而且还需要给用户提供准确的动力电池运行状态信息和续驶里程预测信息等[1-2]。因此,纯电动汽车在不同的行驶工况下能够准确估算出其续驶里程尤为重要。
目前纯电动汽车续驶里程计算方法主要是根据动力电池输出能量与汽车行驶消耗的能量相等的原则来进行计算,而对在不同的行驶工况下续驶里程估算研究的文献甚少。因此本文中采用主成分分析和模糊聚类相结合的方法,对目前比较典型的汽车行驶工况进行特征分析和状态识别,并在此基础上进行基于工况识别的电动汽车续驶里程的估算。通过纯电动汽车在ECE15工况下续驶里程的仿真估算和转鼓试验台测试,验证了其可行性。
1 汽车行驶工况的特征分析与识别
1.1 汽车行驶工况片段特征参数
汽车行驶工况可用汽车行驶速度-时间历程来描述,可为汽车的动力匹配设计、排放水平和能量消耗提供参考和检测依据[3]。比较典型的行驶工况有:美国的UDDS工况、HWFET工况,欧洲的NEDC工况和日本的10-15工况等。选取具有代表性的行驶工况,将这些工况的速度-时间数据按一定的时间周期划分,可得到多个行驶工况片段,如图1所示,将UDDS工况前1 200s的时间历程以时间周期为120s进行片段划分,可得到10个行驶工况片段(以下简称片段)。
为准确描述每个片段,确保不会出现行驶工况的信息丢失和失真,根据文献[4]~文献[6]中确定了12个特征参数用于描述工况片段,如表1所示。表2为UDDS工况前5个片段的特征参数值,可以看出每个片段的12个特征参数值有很大区别。
按照上述方法,选取了20个典型行驶工况,以120s为时间周期,划分得到215个片段,通过提取这些片段的特征参数,进行分析计算,为汽车行驶工况的实时识别奠定基础。
1.2 汽车行驶工况片段的模糊聚类分析
1.2.1 汽车行驶工况片段的主成分分析
主成分分析是通过降维技术把多个变量转化为少数几个主成分,利用这几个主成分反映原始变量的大部分信息。根据主成分分析原理[7-8]可知,若前e(e=1,2,…)个主成分的累积贡献率达到80%或85%时,这e个主成分可代表原始变量进行分析。
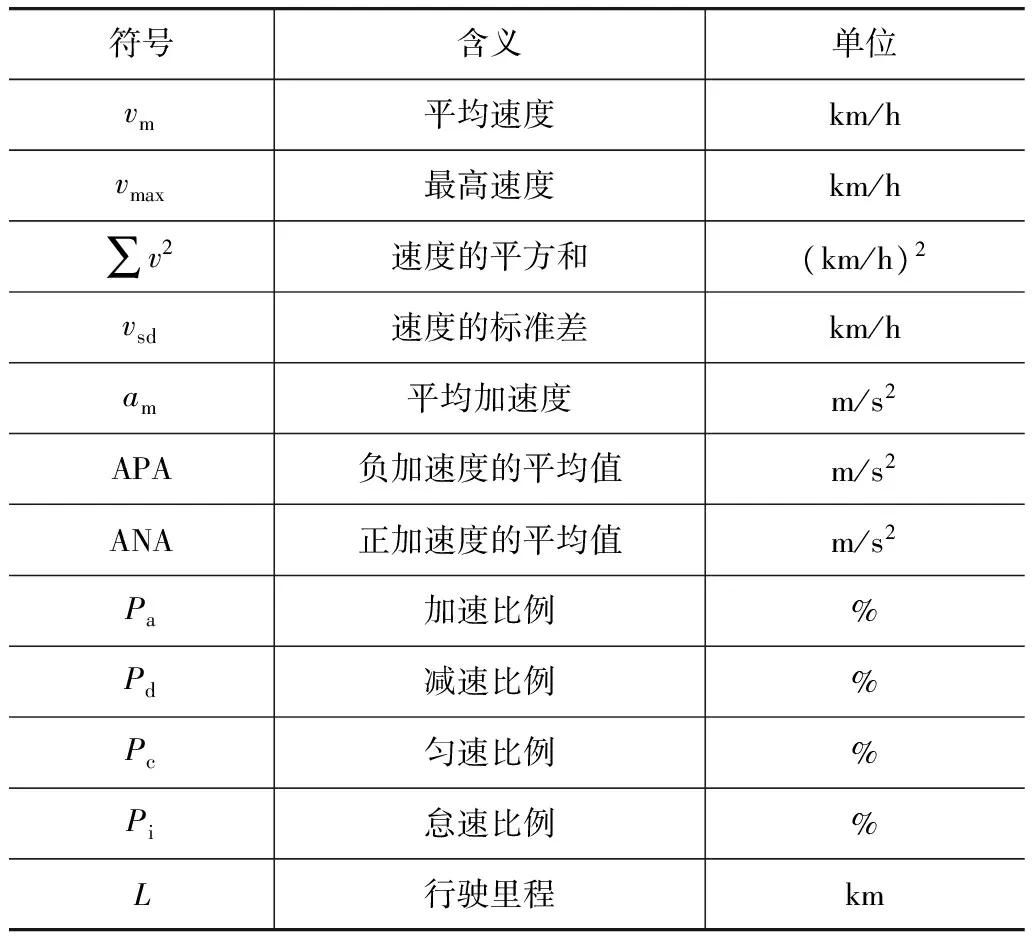
表1 汽车行驶工况片段特征参数
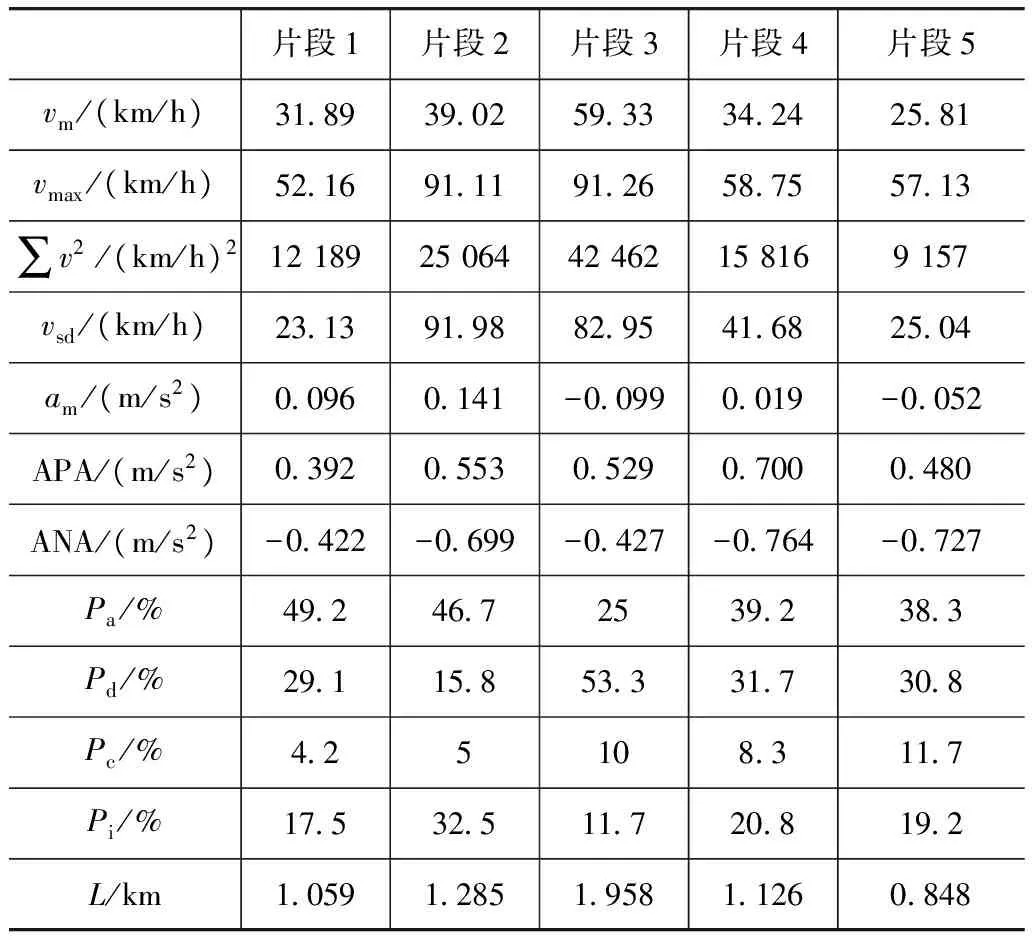
表2 UDDS工况前5个片段的特征参数值
利用MATLAB软件[9]对215个片段特征参数的数据进行主成分分析,得到12个主成分:Y1,Y2,…,Y12。每个主成分的特征值、贡献率、累积贡献如表3所示。按主成分分析原理选取前4个主成分,并进行特征参数与主成分间的相关性分析,从前4个主成分中选取具有代表性的平均车速、怠速比例、匀速比例和减速比例的4个参数用于聚类分析。
1.2.2 模糊C均值聚类分析[10-12]
设研究对象是n个样品和p个变量的数据(n>p),则样品数据观测矩阵可表示为
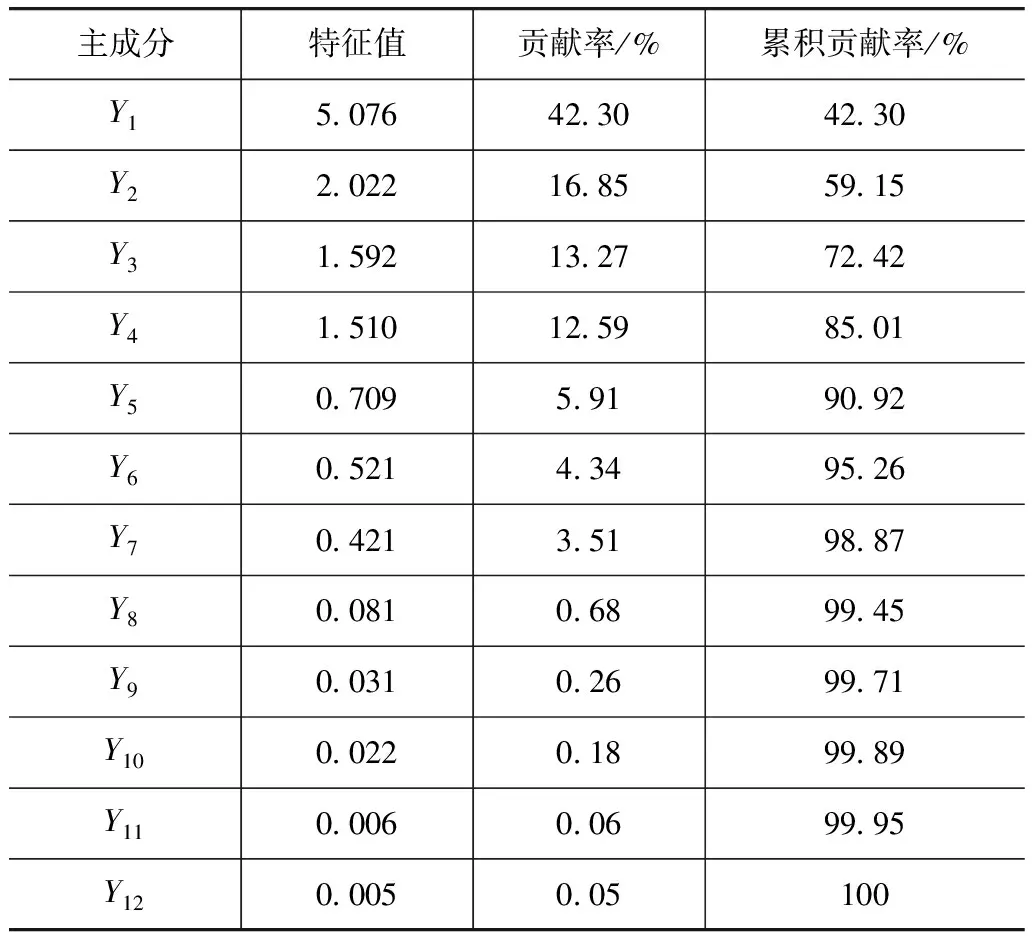
表3 各主成分特征值、贡献率和累积贡献率
(1)
其中每一行为一个样品(或观测),每一列为变量的n个观测值。模糊聚类是将n个样品划分为c类(2≤c≤n),记V={v1,v2,…,vc}为c个类的聚类中心,其中vi={vi1,vi2,…,vip}(i=1,2,…,c)。在模糊划分中,每一个样品不是严格的划分为某一类,而是以一定的隶属度归于某一类。
(2)
其中:U=(uik)c×n为隶属度矩阵;dik=‖xk-vi‖。显然J(U,V)表示了各类中样品到聚类中心的加权平方距离之和,权重是样品xk属于第i类的隶属度的m次方。模糊C均值聚类的准则就是求U和V,使得J(U,V)取得最小值。具体步骤如下。
(2) 计算第l步的聚类中心V(l)。
(3)
(3) 修正隶属度矩阵U(l),计算第l步的目标函数J(l)。
(4)
(5)

经以上步骤迭代之后可求得最终的隶属度矩阵U和聚类中心V,使得目标函数J(U,V)的值到达最小,并根据最终的隶属度矩阵U中元素的取值可以确定所有样品的归属。
1.2.3 汽车行驶工况片段的模糊C均值聚类分析
模糊C均值聚类个数c的取值范围是2≤c≤n。考虑汽车行驶工况特征,对215个片段分别取c=3、c=4、c=5和c=6进行聚类分析,并将其匀速比例(Pc)、怠速比例(Pi)和减速比例(Pd)的聚类中心结果进行对比,如图2所示。由图可见:c=3时聚类1和聚类3的Pc接近;而c=4时各状态类区分比较明显;c=5和c=6情况下各个状态类的时间比例不很明显,特别是匀速比例;故确定聚类个数c=4。
为进一步分析聚类后同一类别行驶工况的特征,利用平均车速vm和怠速比例Pi两个参数表示模糊C均值聚类后的结果,如图3所示。图3中215个片段分成了4类,并标出了每一类的聚类中心。聚类4的中心坐标是(9.382,0.449),这一类的工况片段怠速比例大,车速低,反映了这一类工况属于起停频繁交通堵塞的城市工况。聚类2中心坐标(99.849,0.0055),可见平均车速高,怠速比例很低,这一工况属于交通通畅的高速工况。其他两个聚类介于聚类2和聚类4之间,通常属于市郊工况。通过模糊C均值聚类分析合理地将工况片段分成了4种不同的类型。
1.3 汽车行驶工况的识别
采用主成分分析和模糊聚类相结合的方法进行汽车行驶工况的识别流程见图4,包括离线、在线和识别3个部分。离线部分是将汽车行驶工况数据通过上述的主成分分析和模糊C聚类分析进行分类并得到聚类中心;在线和识别部分是对汽车行驶工况进行实时识别的过程,首先在汽车行驶中获取最近一个片段的数据,并提取该片段的特征参数,然后通过计算特征参数与各个聚类中心的距离di,并根据到聚类中心距离最小的原则确定该片段的类别。
距离计算公式为
di=‖x-ci‖,i=1,2,3,4
(6)
式中:x为某片段的特征参数,x=(x1,x2,…,xp);ci为聚类i的聚类中心参数,ci=(ci1,ci2,…,cip)。
将215个片段通过离线部分的分析得到4类,利用平均车速、怠速比例、匀速比例和减速比例4个特征参数表示聚类中心,结果如下:
c1=(62.2,0.083,0.399,0.136)
c2=(99.8,0.005,0.367,0.156)
c3=(31.5,0.149,0.351,0.075)
c4=(9.38,0.449,0.229,0.042)
工况识别时,首先提取汽车最近一个行驶工况片段的4个特征参数;然后按照式(6)计算该片段到4个聚类中心的距离,最后选择距离最小的聚类作为该片段的类别,对汽车的行驶工况进行识别。表4为识别出的UDDS工况前5个片段的类别,可以看出,片段1、2、4、5到c3的距离最小,因此这4个片段属于聚类3;而片段3到c1的距离最小,该片段属于聚类1。
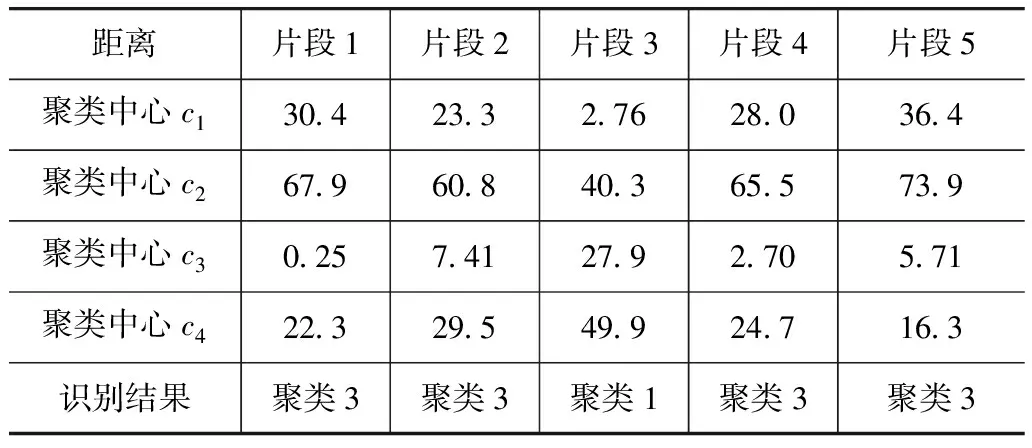
表4 UDDS工况前5个片段识别结果
2 基于行驶工况的续驶里程估算
2.1 基于行驶工况的续驶里程估算方法
影响纯电动汽车续驶里程的因素主要分为两类[13-14]:一是汽车本身的状态,如电池组能量和整车参数;二是汽车行驶工况。基于行驶工况的续驶里程估算是在汽车本身的状态基本确定的基础上进行的,具体估算方法如图5所示。
首先将215个工况片段输入到整车模型进行计算,得到4个聚类的平均能耗;然后对汽车行驶工况进行识别,根据聚类的平均能耗计算出行驶中工况片段的能耗,并进行累加,得出总能耗和剩余能量;再依据已行驶的里程数计算得到单位能耗行驶的里程数;最后根据计算出的单位能耗行驶的里程数和剩余能量来估算纯电动汽车的续驶里程。
2.2 基于行驶工况的纯电动汽车续驶里程估算
2.2.1 各聚类平均能耗的计算
根据纯电动汽车整车主要技术参数(见表5),并在MATLAB/Simulink环境下建立纯电动汽车的整车模型,通过整车模型仿真计算出215个行驶工况片段的能量消耗,如图6所示。
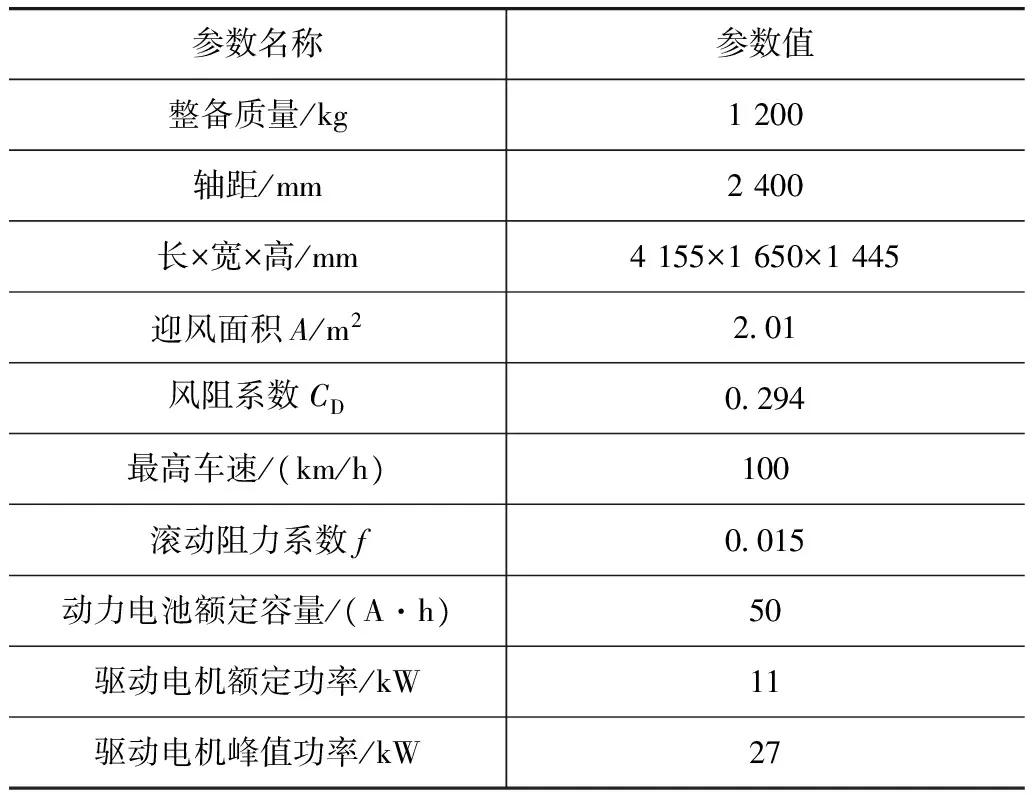
表5 纯电动汽车整车技术参数
通过模糊C均值聚类分析将215个片段分成了4类,并计算出4聚类的平均能耗。各类的平均能耗计算如下:
(7)
由式(7)计算出4个聚类的平均能耗:第1聚类为0.3128kW·h;第2聚类为0.6488kW·h;第3聚类为0.1346kW·h;第4聚类为0.0473kW·h。
2.2.2 续驶里程的估算
通过识别汽车最近一个片段的聚类类别,并以该类别的平均能耗作为该片段的能量消耗,再采用式(8)计算出整个行驶过程中的总能耗。由式(9)和式(10)计算单位能耗行驶的里程和纯电动汽车剩余能量,再由式(11)估算纯电动汽车续驶里程。
(8)
l=S/Ecost
(9)
Eres=Etotal-Ecost
(10)
Sres=lEres
(11)
式中:Ej为纯电动汽车第j个工况片段的能量消耗;Ecost表示纯电动汽车前j个工况片段的总消耗;l为单位能耗行驶的里程数;S为纯电动汽车行驶里程;Etotal为纯电动汽车总能量;Eres为纯电动汽车剩余能量;Sres为纯电动汽车续驶里程。
3 基于ECE15工况的续驶里程估算
3.1 仿真工况和测试工况
鉴于前述纯电动汽车的技术特点和市内交通流状况,仿真工况和转鼓试验台测试工况均使用ECE15工况,见图7,以便仿真结果和测试结果的对比分析。
3.2 续驶里程仿真估算与转鼓试验台测试
以120s为一个片段,通过上述工况识别法计算出ECE15工况的每个片段的能量消耗。根据式(8)~式(11)分别估算出行驶中单位能耗行驶的里程数、纯电动汽车剩余能量和续驶里程。
图8为在ECE15工况下采用行驶工况识别法计算出的纯电动汽车单位能耗行驶的里程数变化曲线。在仿真识别的初始阶段单位能耗行驶的里程数变化有些大,随后稳定在7.1km/(kW·h)左右。
在ECE15工况下通过转鼓试验台对纯电动汽车进行测试,结果如下:整车行驶时间为21 360s,实际总能耗为14.85kW·h,续驶里程为112.6km。
纯电动汽车能量消耗在转鼓试验台测试值和仿真值的比较如图9所示,在ECE15工况下总能耗的仿真值为15.32kW·h,比测试值多0.47kW·h。
续驶里程的估算值与测试值比较如图10所示。估算值与测试值之间的最大绝对误差为1.905km,绝对误差平均值为0.742km,平均误差为2.92%。通过估算值与测试值的比较,说明采用行驶工况识别法对纯电动汽车续驶里程的估算是可行的,并能保证一定的精度。
4 结论
(1) 采用主成分分析和模糊聚类相结合的方法,对目前比较典型的汽车行驶工况进行特征分析和状态识别,在此基础上,进行基于工况识别的纯电动汽车续驶里程的仿真估算。
(2) 在ECE15工况下,利用转鼓试验台对纯电动汽车进行整车续驶里程测试,并与纯电动汽车续驶里程的仿真估算进行比较,验证了基于行驶工况识别的纯电动汽车续驶里程估算方法的可行性,从而为新能源汽车的续驶里程预测提供一个新途径。
[1] Yu Hai, Tseng Finn, McGee. Driving Pattern Identification for EV Range Estimation[J]. IEEE, Electric Vehicle Conference,2012,7(1):4-8.
[2] 陈清泉,孙逢春,祝嘉光.现代电动汽车技术[M].北京:北京理工大学出版社,2002.
[3] 张富兴.城市车辆行驶工况的研究[D].武汉:武汉理工大学,2005.
[4] 姜平.城市混合道路行驶工况的构建研究[D].合肥:合肥工业大学,2011.
[5] 张建伟,李孟良,艾国和,等.车辆行驶工况与特征的研究[J].汽车工程,2005,27(2):220-225.
[6] 罗玉涛,胡红斐,沈继军.混合动力电动汽车行驶工况分析与识别[J].华南理工大学学报,2007,35(6):8-13.
[7] 陆璇,叶俊.实用多元统计分析(4版)[M].北京:清华大学出版社,2001.
[8] 李孟良,朱西产,张建伟,等.典型城市车辆行驶工况构成的研究[J].汽车工程,2005,27(5):558-560.
[9] 谢中华.MATLAB统计分析与应用[M].北京:北京航空航天大学出版社,2010.
[10] 杨淑莹.模式识别与智能计算[M].北京:电子工业出版社,2008.
[11] 马志雄,朱西产,等.动态聚类法在车辆实际行驶工况开发中的应用[J].武汉理工大学学报,2005,27(11):69-72.
[12] Montazeri-Gh M, Fotouhi A, Naderpour A. Driving Patterns Clustering Based on Driving Feature Analysis[J]. Journal of Mechanical Engineering,2011,225(6):1301-1317.
[13] 李国良,初亮,鲁和安.电动汽车续驶里程的影响因素[J].吉林工业大学学报,2000,30(3):20-24.
[14] 陈勇,孙逢春.电动汽车续驶里程及其影响因素的研究[J].北京理工大学学报,2001,21(5):578-581.
