组合碟簧式核级阀门电动装置转矩控制机构的研究
2014-02-10汤占峰许一民徐声云
汤占峰,许一民,邱 文,徐声云
(扬州电力设备修造厂,江苏扬州 225003)
组合碟簧式核级阀门电动装置转矩控制机构的研究
汤占峰,许一民,邱 文,徐声云
(扬州电力设备修造厂,江苏扬州 225003)
简述组合碟簧式核级阀门电动装置转矩控制机构的工作原理。对转矩控制机构的主要件进行了受力分析,推导出组合碟簧设计的理论计算公式。利用ANSYS有限元分析软件对碟簧的应力与变形进行了分析,分析结果与理论计算结构吻合。理论计算和有限元分析方法都对今后设计适用于核级阀门电动装置的转矩控制机构有一定的参考价值。
核级阀门电动装置;转矩控制机构;组合碟簧
0 引言
阀门电动装置的输出转矩是各类阀门设计和选型的重要技术指标,它是通过的转矩控制机构来进行控制的。目前技术比较成熟的转矩控制机构有两类,即采用特殊力感应元件的机械式和采用测力传感器或变频技术的电子式。对于需承受热老化、辐照老化、地震和核事故工况的核级阀门电动装置而言,组合碟簧式转矩控制机构成为最佳选择。
核级阀门电动装置的输出转矩的精度主要取决于其转矩控制机构的控制精度,它主要由组合碟簧参数设计的精确性决定,研究组合碟簧的受力与变形的关系对提高整个机构的控制精度有着非常现实的意义。设计组合碟簧式转矩控制机构的难点是碟簧配置参数的选取。为此,结合转矩控制机构的工作原理,对其主要零部件进行系统地分析和研究。
1 结构与工作原理
组合碟簧式转矩控制机构主要包含组合碟簧、引出机构和控制开关组件三部分,其结构如图1所示。
核级阀门电动装置工作时,电机驱动蜗轮蜗杆减速机构运转,输出转矩推动阀门运行。蜗轮对蜗杆反作用力压迫组合碟簧并使之产生变形,同时蜗杆窜动[1],带动安装于蜗杆左端引出轴转动。当阀门电动装置的输出转矩达到阀门的关闭力或开启力时,控制开关组件的开关动作,控制系统立即切断电机电源,实现阀门电动装置输出转矩与阀门开、关阀所需驱动力的匹配。
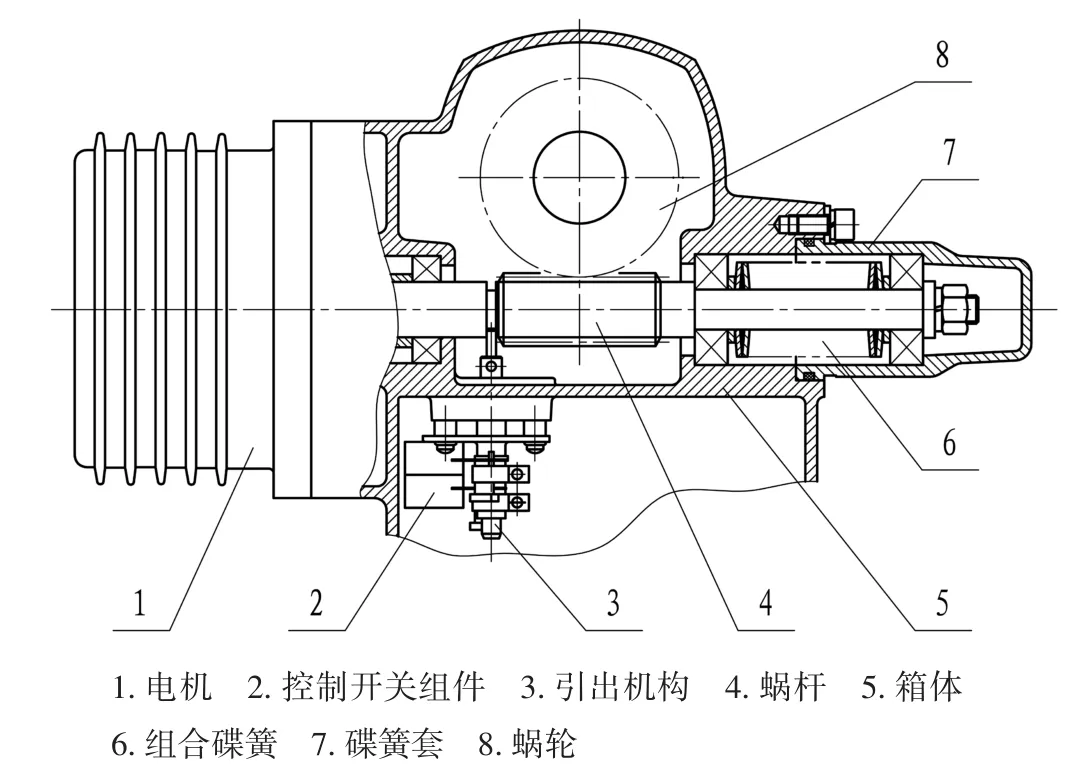
图1 转矩控制机构结构图
2 理论计算
2.1 碟簧实际负载计算
当力矩开关动作的瞬间,阀门电动装置各主要零件的受力如图2所示。
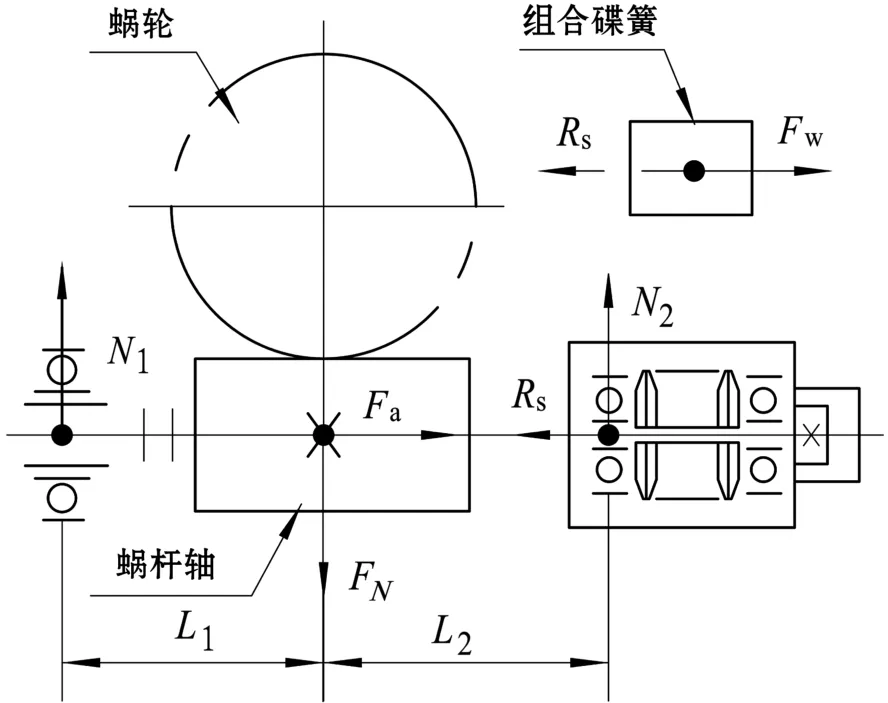
图2 转矩控制机构主要零部件受力图
根据上述受力分析,由平面力学知识容易得出:

Fa——蜗杆轴向力(由核级阀门电动装置的设计输出转矩、蜗轮节圆直径求出),N;
μ1、 μ2——左端轴承与蜗杆轴间的摩擦系数;
L1、L2——蜗杆轴两端的支撑臂,mm。
根据蜗轮蜗杆副啮合理论,可得轴截面反力FN为:

由于蜗杆左、右端的支撑处的摩擦系数近似相等(即μ1=μ2,用同一符号μ表示),并式(1)、
(2)得出组合碟簧实际负载力:

2.2 碟簧的受力与变形关系
核级阀门电动装置选用的碟簧一般为无支撑面碟簧,根据GB1972-2005,单片碟簧的实际负载与其变形量的关系式为:

式(4)中:

K1=1,对于无支撑面碟簧,计算系数;
C=D/d,直径比;
E——弹性模量,N/mm;
μ——泊松比;
D——碟簧外径,mm;
t——碟簧厚度,mm;
H0——碟簧自由高度,mm;
h0=H0-t,碟簧压平变形量,mm;
f——单片碟簧的变形量,mm。
3 利用ANSYS软件分析
利用ANSYS有限元软件对碟簧进行分析是一种便捷实用的方法。现以我厂2HA3.2核级阀门电动装置组合碟簧的计算为例,介绍分析方法。
3.1 分析过程
为简化计算,抽取单片碟簧进行分析。该型号产品的碟簧的参数和最大负载如表1。
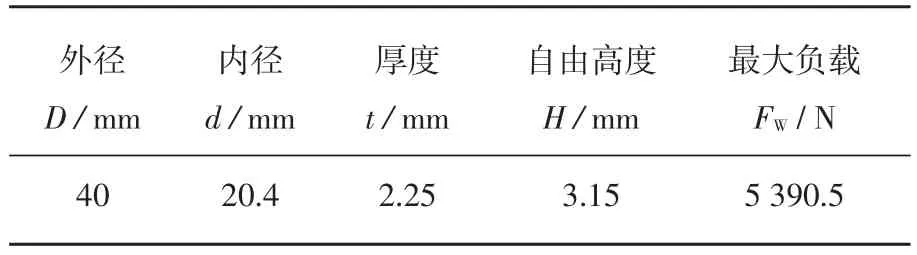
表1 碟簧参数
建立有限元模型:为避免分析结果发散[2],首先将单位制改为MPA。分析类型选择大变形结构静力学类别[3],单元类型为Solid Brick 8node 45单元,材料的弹性模量为2.06×105MPa,泊松比为0.3。根据图3中Ⅰ、Ⅱ、Ⅲ、Ⅳ点的坐标建立碟簧的轴截面,然后挤出单片碟簧的实体模型。
网格划分:将线ⅠⅡ划分为4等份,线ⅠⅣ划分为8等份,点Ⅰ所在的1/4圆弧划分为20等份,采用体映射网格划分的方法生成网格。生成的有限元模型如图4,共生成2 560个单元,3 600个节点。
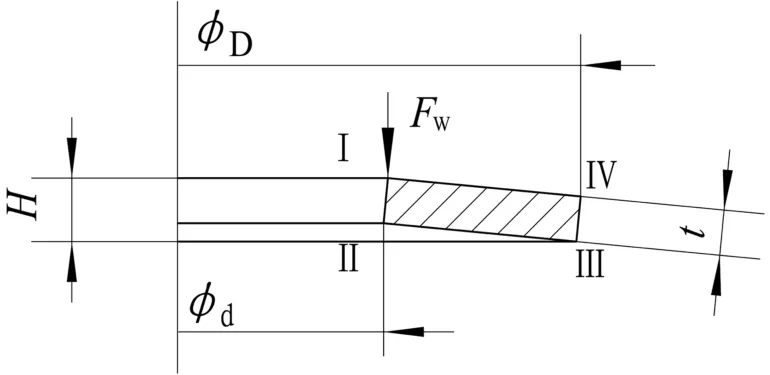
图3 单片碟簧轴截面图

图4 碟簧mesh后的有限元模型
施加边界条件:转矩控制机构工作时,组合碟簧只承受轴向力,单片碟簧只在上下两端圆弧受到约束。因此对有限元模型的Ⅲ点所在的圆弧施加约束UY,模型的四个轴截面施加面约束。
施加载荷和分析:根据受力分析,只需对碟簧上端施加轴向力。利用选择工具菜单选择模型中Ⅰ点所在圆弧上的节点(共80个),对没个节点施加载荷67.38 N(5390.5/80)。运行有限元solve程序,利用后处理模块查看计算结果(如图5、图6)。

图5 碟簧受载时的应力分布图
3.2 结果分析
图5为整个模型的应力分布图,应力的最大点在Ⅰ点所在的圆弧(1 656 MPa)。图6为碟簧轴截面的轴向应变分布图,各重要节点轴向应变如表2所示。

图6 碟簧受载时轴向应变分布图

表2 节点应变
由上表可知,点Ⅰ的轴向应变为0.549 mm,即单片碟簧的变形 f,代入式(4),计算得出碟簧负载为5 377.1 N,证明理论计算有限元计算结果非常接近。
4 结语
基于组合碟簧的转矩控制机构已成功用于我厂2HA3系列核级电动执行机构上。经过多年的试验和应用实践证明,按上述方法设计的转矩控制机构性能稳定、控制精度高,产品的转矩重复偏差在±5%以内,完全满足NB/T20010.11-2010规定的转矩重复偏差小于±7%要求。
此外,文章推导出组合碟簧的负载与变形的理论计算公式,并利用ANSYS有限元分析软件对碟簧的应力和应变进行模拟分析,证明两种方法的一致性,为设计适用于核事故工况的阀门电动装置转矩控制机构提供了方法。
[1]项宏琛.阀门电动装置的转矩控制机构[J].流体工程,1988(06):35-37.
[2]张智裕,周北岳,周勇.蝶形弹簧特性随机有限元分析[J].机械研究与应用,2011(02):7-9.
[3]郑丽娟,安子军,付宇明,等.碟簧载荷的理论分析与数值模拟研究[J].机械设计与制造工程,2002(06):12-13.
Research on Nuclear Grade Valve Actuator's Torque Control Mechanism with Combined Disc Spring
TANG Zhan-feng,XU Yi-min,QIU Wen,XU Sheng-yun
(Yangzhou Electric Power Equipment Manufacture Factory,Yangzhou225003,China)
The paper introduces working principle of nuclear grade valve actuator’s torque control mechanism with combined disc spring. It analyses the mian parts of torque control mechanism detailedly,and also deduces the theoretic computational formula for designing the combined disc spring.Then it analyses the stess and transmogrification of the disc spring using the ANSYS.The method with finite element analysis and theoretic calculation can be introduced to the future design of disk spring that can be the same with the torque control mechanism of nuclear grade valve actuator.derivate
nuclear grade valve actuator;torque control mechanism;combined disc spring
TH134
:A
:1009-9492(2014)11-0113-03
10.3969/j.issn.1009-9492.2014.11.030
汤占峰,男,1980年生,湖北黄冈人,硕士研究生,工程师。研究领域:热工自动化、阀门电动装置。已发表论文6篇。
(编辑:王智圣)
2014-06-05
