面向栅格化信息系统的体系对抗仿真实验体系与技术
2014-02-07查亚兵黄金才
查亚兵,刘 忠,黄金才
(国防科技大学信息系统与管理学院,长沙 410073)
0 研究现状
C4ISR系统涵盖了指挥、控制、通信、计算机、情报、监视和侦察,围绕指挥控制,把作战所依赖的各类要素有效整合起来,借助于信息系统为指挥控制人员、战斗人员甚至武器系统提供有效信息,最终提升作战效能,其核心是信息的有效获取、共享和应用。与C4ISR的发展同步,美国于1995年提出建模和仿真主计划(MSMP),建立了建模和仿真的标准,提出了高层仿真体系结构(HLA)。HLA的提出和推广应用极大促进了建模仿真技术的发展,特别是为C4ISR系统的体系结构研究、系统设计、效能评估、训练和新概念验证提供了非常有效的工具。HLA是系统工程方法指导下的仿真系统建设的基础框架,其与当时的C4ISR系统建设水平和系统作战应用模式相适应。
随着大量C4ISR系统的建设,美国认识到针对特定使命和任务建立的C4ISR系统反而成为一个个孤立、封闭的信息孤岛,使得花费巨大代价获取的信息却无法及时地被其他C4ISR系统使用,这严重违背了C4ISR系统建设的初衷。鉴于此,需要一种新的作战概念来促进信息的有效获取、分发、共享和应用,网络中心战(NCW)应运而生。NCW把美国和盟军的C4ISR系统建立在公共、标准的信息网络之上。全球信息栅格(GIG)是支持NCW运作、C4ISR系统建设和运行的物理网络,支持美国及其盟国的各种类型C4ISR系统及时、有效地互联互通,最终把信息优势转化为决策优势和更为优异的作战效能。
基于信息系统的体系作战成为现代战争的发展方向,在此背景下,战争的胜负不再仅仅取决于单个平台的作战能力,重要的是取决于战场攻防双方的体系对抗能力。战争呈现出更加复杂的内在特征,主要表现为战争系统的不确定性、适应性和涌现性(复杂性)。战争系统是由许多具有自主特性和适应能力的实体组成,而这种实体的属性和行为充满了不确定性;不确定性会导致系统状态发生未知的变化,为适应系统状态的变化,系统会根据环境状态产生适应行为,表现出系统的适应性;众多实体在适应的过程中不断交互,会导致在更高层次上的系统行为的涌现性,涌现性又会引发新的不确定性。这三个因素之间相互影响,形成一个行为关系环。
针对具有 “三性”特质的体系对抗作战行为,无法用经典的系统工程方法论来分析和评估,以分布式仿真和HLA的经典思路和方法无法处理体系和体系对抗问题,因此必须探讨和设计新的仿真实验方法论和工具。美国自1998年启动联合作战实验室建设,作战仿真被作为支撑联合作战实验的主要技术手段,在军事信息系统演示验证和作战应用等多个方面发挥了关键作用;尤其是经过十多年的建设,联合作战实验室已具备显著的体系化特征,因此同样要求作战仿真技术也朝着新型应用模式和体系化的方向发展,以支持体系对抗等新型的作战模式。
以服务化技术、云计算、探索性分析和社会智能为代表的技术发展为建模仿真领域各种不同类型仿真系统在广域范围内的有效互操作和有效集成、聚合和组合,以支持体系对抗仿真实验带来了契机。结合体系对抗的“三性”要求,提出以“栅格化信息系统”、“探索性框架”和“适应性学习”为关键技术特征的体系对抗仿真实验体系,并对关键技术问题进行了探索。栅格化信息系统是体系对抗仿真实验的基础设施,探索性框架是体系对抗仿真实验的指导性方法论,而适应性学习是体系对抗仿真实验的核心手段。
“栅格”一词于20世纪90年代中期提出,最先用于表述用于先进科学和工程计算上的一种分布式计算体系结构,后演变成复杂分布式系统的集成框架。1999年9月,美军第一次提出了全球信息栅格的定义:全球信息栅格是全球互连的、终端到终端的信息能力、相关程序及人员的集合,对战斗员、指挥员和后勤支援人员所需的信息进行收集、处理、存储、分发和管理。栅格化信息系统体现为一系列的分布式服务,这些服务来源于现存的、在作战体系内部普遍使用的各类信息系统。采用栅格化信息系统的思路和框架构建了体系对抗仿真实验体系,从而最大化地支持体系作战问题研究。
探索性分析方法是一种探索想定中的不确定因素所引起的结果变化,并对结果进行学习重新探索不确定因素的循环过程。它是解决想定建立和优化中所遇到困难的一种有效途径。在不断探索循环中,更多的不确定性因素转换为确定性因素;在不断多分辨率建模过程中,通过模型的分解与聚合会发现更多的涌现性规律;在不断反馈和学习过程中,更好地模拟出实体的适应性特征,并能得出最优化的决策方案。因此,将探索性分析思想引入到体系对抗作战建模框架和实验方案生成中,设计基于探索性框架的体系对抗实验流程。
适应性学习是一种研究与环境进行交互学习的计算方法。作为仿真实验体系中的实验系统,可能是人在回路,也可以是人不在回路,“人”也是实验体系的一部分。在栅格化信息系统环境下,仿真实验体系体现为一个动态的学习系统。通过实验性学习机制,能够提高仿真实验系统在动态不可预测的环境下的问题求解,获得较优的体系对抗方案,并修正自身结构和行为,用于指导下一步的系统行为。因此,将适应性学习思想引入到体系对抗实验方案生成和优化研究中去,并探讨具体的实现方法。
1 基于栅格化信息系统的一体化协同仿真实验框架
协同仿真实验框架的研究着眼于体系对抗一体化仿真执行的全过程,以栅格服务架构为基础,围绕体系对抗仿真任务,为体系对抗的定量分析和方案验证提供的运行支持框架,同时也为体系对抗作战参谋人员的模拟训练提供环境支持,建立面向体系对抗作战研究需求的仿真实验框架。
仿真实验框架在逻辑上由四个层次构成,分别是栅格基础设施、实验支撑服务、实验规程和体系对抗实验问题。
栅格基础设施集成管理各种武器装备、系统和设施,包括计算设备、传感器系统、存储设备、通信设施、网络和武器装备等。这些武器装备、系统和设施既可以是真实的,也可以是包括各种模拟器,从而支持虚实结合的体系对抗仿真实验。栅格基础设施同时维护和管理基础栅格服务,以支持上层应用。按照美军的GIG的设计,栅格关键服务包括九大类服务:发现服务、安全服务、分发服务、调节服务、存储服务、消息服务、聚合服务、管理服务和资源服务等。
实验支撑服务是在栅格基础设施的基础上,以体系对抗仿真实验的灵性设计为主线,仿真实验工具的能力被作为仿真服务进行动态组合和集成,从而形成面向特定体系对抗仿真任务的仿真“虚拟组织”。实验支撑服务分为三大类:基础服务类(包括基础的实验支撑工具)、模型服务类(包括支持实验的各种模型、规则和案例)和应用服务类(包括直接支持实验应用生成和运行的服务)。
从实验规程来看,体系对抗仿真实验的开发过程可分为实验规划、应用生成、仿真运行和效能评估。仿真运行主要由仿真基础平台、多种分布式仿真软总线和不同的仿真执行单元构成。其中,仿真软总线可用基于服务的组件、HLA或XMSF实现。仿真过程中,通过引入资源服务和虚拟代理机制,支持仿真执行单元对不同分布式仿真软总线的透明访问,实现了体系对抗的多异构总线协同仿真。
要素和过程共同构成面向体系对抗的一体化协同仿真实验架构,如图1所示。为解决体系对抗态势博弈、作战方案/计划评估、联合作战问题研讨、联合作战训练和新作战概念设计等体系对抗问题提供一致、通用的解决方案。
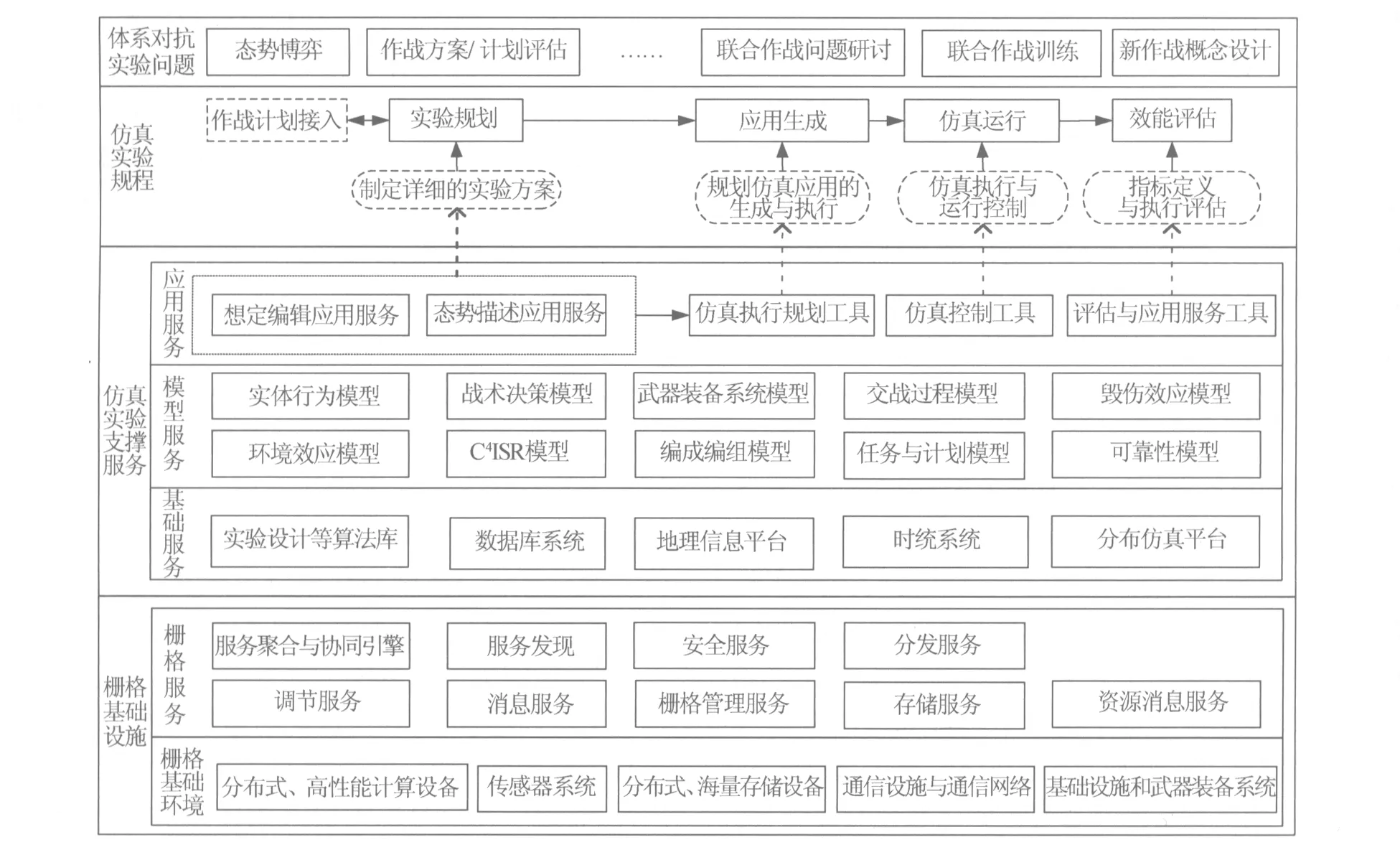
图1 面向栅格化信息系统的仿真实验体系框架
一体化协同仿真实验体系框架描述了以栅格化信息系统为基础的系统概貌,其以服务为基础进行工作,同时其本身也体现为一个栅格化的“信息系统”,为其他仿真实验系统提供服务,并且仿真实验系统与真实的C4ISR系统无缝交互,虚实结合,协同工作。
2 基于栅格化信息系统的一体化协同仿真实验关键技术
为有效支持上述框架的实施和运行,必须解决和研究以下四类关键技术问题。
2.1 体系对抗仿真服务规划技术
由于分布式仿真环境中资源具有高度的分散性、动态性、临时性和不确定性,同时也具有广泛的可用资源,这就需要根据体系对抗仿真与评估的任务进行自主协商,产生合理的资源调度方案,形成协作的“虚拟组织”,共同完成体系对抗仿真任务。
基于自主协同的仿真服务规划技术必须根据具体的仿真任务,解析体系对抗实验任务需求,在发现定位必需的仿真服务的基础上,自动协同选择、优化可用的资源以形成仿真联邦。服务规划的基础是对于分布式地域和领域环境下仿真服务的发现和组织。
(1)基于“服务社区”的实验服务发现技术
实验体系的目的也在于集成各种服务支持灵活的、一体化的体系对抗仿真实验。与基于DIS或HLA的分布式仿真系统相比,一体化协同仿真实验框架中将集成规模更大、种类更多,且分属于不同单位的仿真资源;参与的各结点往往拥有不同的资源管理策略,而且各个结点可以动态的加入和离开。在这种动态、大规模的分布式环境中,集中式的资源注册/发现方式将会出现性能瓶颈,而且容易出现单点失效;由于安全和生存性方面的原因,集中式的方式难以适应严酷的战场环境。因此,适应面向栅格化信息系统的一体化协同仿真体系需求的资源注册/发现机制应该是不依赖集中和全局控制的非集中的方式,而且需要适应大规模、动态的环境,并具有较高的效率。
目前在基于DIS或HLA的仿真中,仿真控制邦元的发现依赖于网络层的多播,或者是在仿真前进行手工配置,对资源进行提前绑定。利用IP多播进行资源发现的方式需要对网络层的路由器进行特殊配置,因而不具足够的灵活性和可伸缩性;而对资源进行提前绑定,事先指定资源所在的域名不具有足够的灵活性,难以适应仿真网格这种大规模、动态的环境。
将Gnutella系统的高可生存性与DHT系统的高效率结合起来,提出“服务社区”的概念,以及基于服务社区的服务组织与资源发现框架。基本思路是根据注册的服务类型将结点分类,使注册有同类资源的结点自组织形成重叠网络,即服务社区,并利用DHT的结点组织与服务查找技术,组织一个上层的索引网络,提供社区间的高效导航,总是将服务发现请求转发到相应的社区,从而提高服务发现的效率。这种非集中式资源发现的框架既改善了泛洪搜索的盲目低效,又避免了基于DHT的资源查找方式中不支持基于资源属性查找的缺陷,实现了以上两种方法的互补结合。在这一基本的思路下,在模型资源的分类体系基础上,并借鉴P2P网络中提出的结点间重叠网络构造与维护协议研究提出服务社区内部的结点组织维护协议,以及上层索引网络结点的非集中式的选举、动态产生维护的方法与协议。
(2)具有自组织特性的服务定位技术
实现一体化、灵活集成各种仿真服务的仿真网格中最核心的问题是如何按需将应用与各种仿真服务绑定起来,形成仿真虚拟组织(VO),完成仿真实验应用。服务定位的任务是从这些服务集合进一步获取相关服务的细节、动态的信息,可能还包括大量的对服务状态的预测,并考虑服务之间的约束和协作关系根据优化的原则进一步挑选出与应用绑定的资源。在目前基于DIS和HLA的仿真中,仿真应用与服务(资源)的绑定是在应用的编译阶段进行的,也可以视为一种集中式的资源指派。与集中调度的方式不同,在多应用调度的方式下,各应用通过协商、谈判独立决定服务提供者。不同的资源提供者之间是相互博奕的关系,资源的定位呈现出自组织特性,即不依赖于某个集中管理结点,各结点独立的根据有限的知识通过协商共同确定资源的绑定。为了适应动态多变的战场环境,引入应用层调度的方式对服务进行灵活有效的利用也是非常必要的。
具有自组织特性的资源定位方法需要能够在没有固定集中控制的情况下处理结点的动态加入和退出,而不需要人为干预或重新配置,而且定位过程本身不应该在系统中引起大的处理负载和网络开销,同时应该具有较高的效率:对于多个功能相同或类似的资源,可以根据应用需求及资源状况定位到其中具有较高服务质量的资源。这里的一个关键问题是:如何在非集中式的动态环境中快速找到能够提供特定服务的资源,而且还要是在能够提供相同服务的资源中服务质量比较好的一个。这实际要求了在资源定位中不但要考虑资源的静态特征,即是否能提供所需服务;而且还要考虑资源的动态特征,如负载、服务策略和开销等。
如上,基于服务社区的服务发现框架将能够保证根据应用的需求找到所有满足类型约束的资源集合。结合这一服务发现框架研究如何在社区内部进行不依赖集中结点的自组织式的服务定位的技术与方法。基本思路是利用社区内部结点间的“推荐”来寻找具有高服务质量的结点:对于进入的资源定位请求,结点总是将其前递给相同社区中服务质量最高、且优于自身的邻结点,直到无法继续。自组织网络和社会学方面的研究表明,在大规模的自组织网络中仅利用局部知识来进行高效的资源定位是可行的。
2.2 面向嵌入C4ISR系统的一体化协同仿真技术
嵌入C4ISR系统的主要目的是为了将仿真系统与C4ISR系统等信息系统有机集成起来,实现仿真系统与作战系统的有机集成,实现二者之间的信息共享。大量的研究表明,面对未来的信息化战争,仅仅依靠仿真系统或C4ISR系统都难以胜任,必须将二者有机结合起来。仿真系统能使得更多的不可见信息可视化,而C4ISR系统提供的实时的战场态势信息是仿真系统运行的依据。C4ISR系统侧重于战场的当前状态,而仿真系统则更加侧重于战场未来的状态,这些信息共同构成了指挥人员对于战场态势的理解。要实现体系对抗实验研究和应用的目的,首先必须将仿真系统内嵌到联合作战方案执行与评估系统之中。
面向嵌入C4ISR系统的一体化协同仿真技术的概念模型,如图2所示。
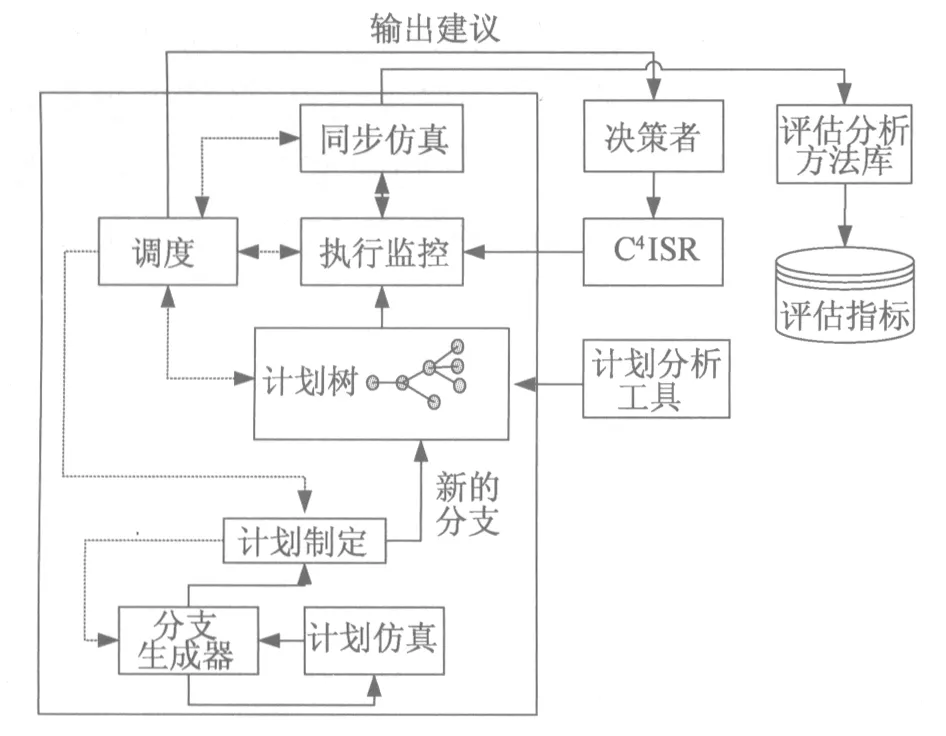
图2 面向嵌入C4ISR系统的一体化协同仿真技术的概念模型
模型是以计划树为核心,整个系统由多个仿真服务、计划制定服务、执行监控服务、调度服务、C4ISR服务、分支生成服务和计划分析服务等组成。执行监控服务的主要功能是对整个战场态势的各个方面进行监控,通过调用仿真服务,基于各种指标体系完成对计划的评估分析,比较获得的战场的真实状态与计划预期状态是否一致,如果不一致,则调用监控服务对这种偏差所导致的后果进行评估,决定是否需要重新进行计划制定和优化。如果需要重新计划,则通知调度服务,调度服务将根据优先级放置计划服务到计划树中某个节点。计划制定服务将对计划进行更新,删除无效的分支,调用分支生成服务生成新的计划分支,并通过计划仿真选出合理的分支将其加入到计划树之中。
2.3 体系对抗仿真实验的探索性框架
探索性分析思想为解决复杂性问题提供了一种很好的思路,特别适合应用到复杂条件下体系对抗仿真实验方案的生成与优化方面。探索性分析思想作为一种方法论被广泛接受,但是如何实施探索性分析则是一种非常困难的事情,特别是对于大规模实体的复杂系统来说更是如此。
实现探索性分析,首先就要构建适合探索性分析特性的模型;探索性分析过程中,需要能够在复杂的作战任务情况下迅速定位到可以进行仿真实体,并且可以对实体的属性和行为进行探索。为适应这种需要,在建模时,采用多分辨率建模的思想,快速定位到所要研究的仿真服务;仿真系统的属性和行为设计为可以探索的,通过状态机将两者联系起来。在体系对抗实体属性和行为探索的过程中,要遵循一定的步骤和标准,采用科学的探索方法,探索到感兴趣的领域。
体系对抗仿真实验的探索性分析方法以复杂使命环境下体系对抗作战问题研究为目标,面向复杂使命环境的不确定性、适应性和涌现性,通过对动态环境下的体系对抗作战效能进行快速探索与测度,全面认识复杂使命环境的体系对抗作战问题研究。
结合探索性分析的典型过程,论文建立面向体系对抗仿真实验的探索性框架,如图3所示。
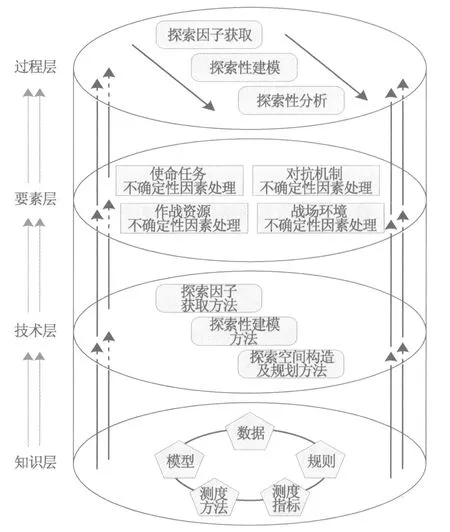
图3 面向体系对抗仿真实验的探索性框架
面向体系对抗仿真实验的探索性框架是一个四级的层级结构,自下而上分别是知识层、技术层、要素层,以及过程层。知识层是探索性框架的基础,基于探索性分析进行体系对抗作战研究,必须首先发掘研究问题的相关知识信息以获取对问题的全面认识,知识层为探索性框架提供多种知识服务,这些知识信息是关于体系对抗作战的多种知识信息,主要包括有相关模型、数据、规则、测度方法,以及测度指标;技术层是探索性框架的支撑,为体系对抗作战的探索性分析提供技术支持,包括探索因子获取方法、探索性建模方法及探索空间构造与规划方法;要素层定义了探索性框架所面向的体系对抗作战问题,需要处理的包含于复杂使命环境的多种不确定性因素,这些不确定性因素主要来自于使命任务、对抗机制、作战资源,以及战场环境层次;过程层则规范了基于探索性分析进行体系对抗作战问题处理流程。
2.4 基于适应性学习的体系对抗实验方案优化技术
相对于传统的实验方案设计,体系对抗的“三性”对实验方案的设计带来了巨大影响。实验方案的设计过程分为两个阶段:实验方案建立阶段和实验方案优化阶段。在体系对抗实验方案建立过程中,需要对实体进行多分辨率建模和实体属性及行为的参数探索,需要完成大量实体的交互,涌现出各种仿真结果;在实验方案优化过程中,需要根据反馈结果进行适应性学习,调整实体的属性和行为,调整实验方案中实体结构,形成优化的体系对抗实验方案。
(1)基于多粒度探索的实验方案建立
实验方案建立阶段是实验方案的准备过程,如图4所示。从问题空间得到仿真实验问题后,开始建立实体多粒度的层次模型,创建的过程中不断探索实体参数,并检查想定,直到各领域专家满意为止。
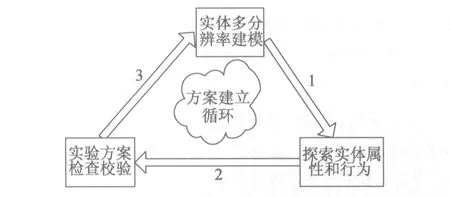
图4 实验方案建立循环步骤
实体多分辨率建模。对实体进行层次划分,建立与作战任务对应的模型,利用每个实体所各自具有的属性、行为和接口来刻画作战能力,要让决策者相信建立的实体模型能够反映所研究的问题,问题领域的专家相信模型充分表示了现实世界,分析者相信能获取所需的数据,建模者相信能在模型上实现现实所需要的资源。通过预先制定的组织结构间接地规定了不同实体模型能力及它们之间的连接方式和控制流程。变精度建模过程中重点对实体属性和行为建模,属性和行为具有可以探索的特性,通过状态将属性和行为联系起来。
探索实体属性和行为。首先对实体属性和行为进行探索,形成方案组合。由于系统由多实体组成的,探索时既可以通过添加或删除实体来调整端口输入变量的结构,也可以动态地修改和调整实体属性和行为变量。
实验方案检查校验。检查生成的实验方案是否符合度量标准,如果不符合就回到第一步。如果符合度量标准,则进入实验方案优化阶段。这种度量标准是指想定的合理性,想定合理性既可以通过仿真中的一些常识检验,也可以通过仿真结果的合理性来检验。
(2)基于协作学习的实验方案优化
在“实验方案优化”阶段,如图5所示,用不同的参数组合和随机种子在特定的行为规则下多次执行想定,分析运行结果,根据分析结果调整实体行为策略或者调整实验方案。
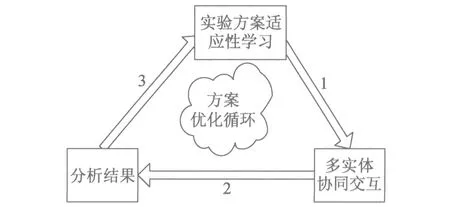
图5 实验方案优化循环步骤
实验方案适应性学习。实验方案运行之后,学习多实体交互的结果,根据反馈回来的结果调整实体的属性和行为。确定实体属性和行为对仿真结果产生的影响,明确下一步工作中所要探索的实体属性和行为。
多实体协同交互。实验方案优化过程中,涉及到众多的实体,实体间的交互行为要达到比较理想的模拟效果,必须重视实体行的协同和交互。观察大量实体在相互交互过程中的涌现现象,得到结果。通过观察它们的历史行为,并采用适当的方法预测它们的行为,实体将自己的行为与其他实体可能行为融合,根据融合所得的多种可能的联合行为方案决定自己采取何种行为能实现自己的目标。
分析结果。将多实体交互的结果与原有的实体行为策略和实验方案条件进行对比。对于大规模模型,在上千次的运行结果中探索其输入空间是非常费时的,这种情况下对支撑工具的需求就更加迫切。事后分析处理是能按照分析内容要求特征化输出空间,帮助分析者采用更自然的方式描述系统探索结果,任何分析方法和可视化方法都可应用于仿真结果分析,一般情况下聚类技术是特征化输出空间的一个重要技术。对结果分析后,可在n维的输出空间中暴露出趋势、异常和拐点等。
3 结 语
针对体系对抗仿真的特点,对体系对抗仿真实验带来的挑战进行分析和研究,提出以“栅格化信息系统”、“探索性框架”和“适应性学习”为关键技术特征的体系对抗仿真实验体系,并对关键技术问题进行了探索。栅格化信息系统是体系对抗仿真实验的基础设施,探索性框架是体系对抗仿真实验的指导性方法论,而适应性学习是体系对抗仿真实验的核心手段。论文的研究工作为信息化条件下体系对抗仿真提供了较好的参考框架和技术研究指导。
论文所提出的框架和关键技术是在作者多年研究积累基础上提出的,并得到了国家自然科学基金多个项目的支持。由于体系对抗仿真实验体系建立的复杂性以及相关技术的验证难度,对于论文中所提出框架的关键技术,其实验验证工作还有待研究团队进一步展开。
[1] 黄柯棣,邱晓刚,查亚兵.建模与仿真技术[M].长沙:国防科技大学出版社,2010
[2] 胡晓峰,司光亚,罗批,等.战争复杂系统与战争模拟系统研究[J].系统仿真学报,2005(11):2 769-2 774.
[3] LIN LI,MENG QIAN,ZHONG LIU,et al.Temporal COAs Coordination Supported by Plan Merging and Simple Temporal Network[C]//EECS2012,Shanghai,2012.
[4] EDISON E,SHIMA T.Integrated Task Assignment and Path Optimization for Cooperating Uninhabited Aerial Vehicles Using Genetic Algorithms[J].Computers & Operations Research, 2011(38):340-365.
[5] 胡晓峰,杨靖宇,胡润涛.探索性分析方法:一种基于协同的探索性仿真分析方法[J].系统仿真学报,2007(4):1 651-1 655.
[6] 杨镜宇,司光亚,胡晓峰.战争分析仿真实验:战争工程方法学的一类实践[J].系统仿真学报,2005(11):2 775-2 779.
[7] 宋华文,王凭慧,王钰.基于Agent的弹药供应控制智能决策支持系统研究[J].指挥技术学院学报,2001,12(4):86-90.
[8] 陈艳彪.基于多智能体的坦克分队对抗仿真模型研究[J].系统仿真学报,2004(4):705-707.
[9] 戴剑伟.基于多Agent的地面作战建模仿真研究[J].系统仿真学报,2001(11):69-72.
[10] FERBER JACQUES.Multi-Agent Systems:An Introduction to Distributed Artificial Intelligence[M].UK:Addison Wesley Longman,1999.
[11] NICHOLAS R.JENNINGS,MICHAEL J.Wooldinge.Agent Technology-Foundation,Application and Markets[M].Springer 1997.
[12] STUART E JOHNSON,MARTIN C.LIBICKI,et al.New Cjallenges New Tools for Defense Decisionmaking[Z].2006.
[13] 张明智,胡晓峰,司光亚,等.基于Agent的体系对抗仿真建模方法研究[J].系统仿真学报,2005(11):2 785-2 788.
[14] 曾宪钊,蔡游飞,黄谦.基于作战仿真和探索性分析的海战效能评估[J].系统仿真学报,2005(3):763-766.
[15] STEVE BANKES.Exploratory Modeling for Analysis[R].USA:RAND,RP-211,1993.
