机载光学定位测量跟踪器研究
2014-01-21竺春祥鹿存跃黄整章
竺春祥,鹿存跃,杨 明,黄整章
(上海交通大学 仪器科学与工程系,上海 200240)
机载光学定位测量系统一般由基座、照准架、伺服控制、摄像设备等部分组成[1-2],主要安装于汽车、飞机、船舶等多种载体上,通过可见光摄像机等有效载荷协同载机上其它电子设备完成对地目标瞄准、跟踪、定位测量功能。本文所主要介绍的光学定位测量跟踪器是安装在无人机上,并与激光测距仪和GPS定位系统配合,以完成对如桥梁裂缝[3-4]等地面固定目标的精确定位功能[5-7]。目前对跟踪器的研究主要应用传统的电磁电机配合减速机构。跟踪器电机多采用单路驱动的方式,存在结构复杂、精度低、不易小型化等缺点。
本文利用超声电机[8-9]和双路电机驱动器来构建机载光学定位测量跟踪器。系统包括两个直径为60 mm超声电机组成的摄像支架、以高性能STM32F103ZET6为核心的双路超声电机驱动器。设计了一种机载光学定位测量跟踪器。该系统具有响应快、精度高、易于小型化、集成度高等优点。
1 跟踪器总体结构设计
图1为跟踪器系统总体结构图。系统由仰俯回转框架、水平回转框架和支承框架组成。仰俯回转框架由一个带编码器的超声波电机驱动,通过刚性联轴器在一端与仰俯回转框架相连。超声波电机所带编码器精度为2 000线。高清变焦摄像头安装在仰俯回转框架内。在仰俯回转框架的另一端安装有一个精度为0.1°的编码器,用于对带编码器的超声波电机驱动和定位精度进行评测。另一组带编码器的超声波电机安装在支承框架上,通过刚性联轴器与水平回转框架相连,并带动其做水平旋转运动。
2 跟踪器硬件电路设计

图1 跟踪器系统总体结构图Fig.1 Structure diagram of the tracker system
所研制的跟踪器硬件电路框图如图2所示。主要由基于STM32F103ZET6的信号产生电路、双超声电机驱动电路组成。首先,上位机图像处理软件根据目标位置确定电机旋转角度值,并将该值通过串口发送到基于STM32的双路超声电机控制器中,驱动两个电机旋转,同时STM32对编码器输入的脉冲进行计数,从而对电机的起停和旋转角度进行控制。实现目标运动的实时跟踪。

图2 驱动电路框图Fig.2 Structure diagram of drive circuit
2.1 基于STM32F103ZET6芯片的信号产生电路
超声电机的驱动信号由32位ARM系列STM32F103ZE T6芯片来产生。该芯片以ARM Cortex-M3为核心,具有72 MHz主频、512 KB Flash的代码存储空间和64 KB的SRAM。STM32F103ZET6芯片拥有面向电机控制的丰富外设。其中,高级控制定时器(TIM1和TIM8)和通用定时器(TIMx)是完全独立的,它们不共享任何资源。本文使用高级控制定时器TIM1和TIM8分别产生两对相差90°,带死区的互补PWM信号,且该死区大小可编程控制。由芯片数据手册可知,两个高级控制定时器能产生6对互补PWM波。跟踪器需要4对互补PWM波。因此,TIM1和TIM8可满足要求。此外,TIM1和TIM8有多种工作模式,本系统使用其 Toggle模式,该模式可以控制一个输出波形,或者指示一段给的时间已经到时。通过配置各通道比较寄存器的内容就可以产生不同相和不同频的PWM波。
2.2 双路超声电机驱动电路
图3为双路超声电机驱动电路框图。该电路由STM32接收上位机软件发送的角度信息,产生8路互差 90°的同频方波信号,每四路经光耦隔离电路、开关管驱动电路和推挽逆变电路以及阻抗匹配电路后,最终得到四路相差 90°的高频高压的正弦信号。驱动电机旋转。
3 跟踪器软件设计

图3 双超声电机驱动电路框图Fig.3 Diagram of double ultrasonic motor drive circuit
跟踪器系统软件流程图如图4所示。该程序主要实现3部分功能:串口通讯;产生两组超声电机驱动信号;对编码器的脉冲进行捕获和计数。首先,串口通讯给下位机发送水平方向和垂直方向的转动角,下位机产生驱动信号,驱动超声电机旋转,同时STM32对编码脉冲进行捕获计数,到达设定角度时停止电机。
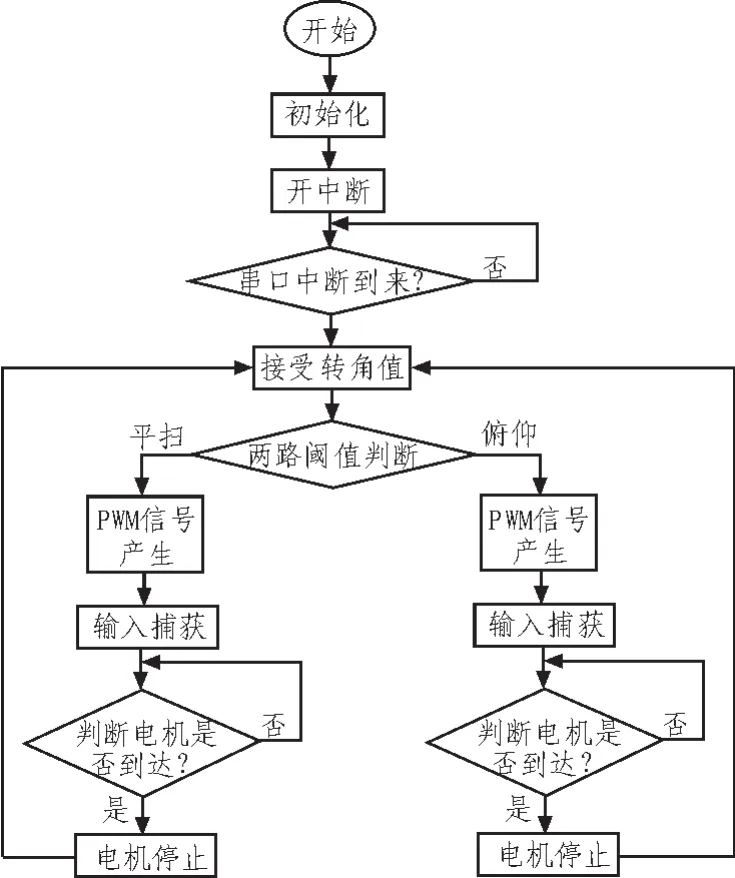
图4 下位机主程序流程图Fig.4 Flow diagram of the main program
驱动信号产生通过配置TIM1和TIM8高级控制定时器工作在输出比较模式。其产生信号的频率通过下式得到:

式(1)中,SystemCoreClock 系统时钟为 72 MHz,f为高级定时器TIMx所产生PWM信号的频率。相位差通过配置通道1捕获/比较寄存器 (TIMx_CCR1) 或通道 2捕获/比较寄存器(TIMx_CCR2)的值实现。例如,当 TIMx_CCR1 的值为 861,若需要TIMx_CH2滞后TIMx_CH1 90°时,则TIMx_CCR2的值为:

4 实验结果
所研制的跟踪器驱动电路如图5所示,电路可产生四路高频高压正弦信号,同时驱动两个超声电机。为了验证系统高速运行下的启停特性,进行了电机按设定角度启停实验。在电机初始静止的情况下,设定计数脉冲以50个为间距逐步递增,同时用更高精度传感器对其测试,得到的电机设定角与实际转角曲线如图6所示。测试的点均落在理论曲线附近且误差不大于一个编码脉冲即0.18°。结果表明,本系统响应时间小于 3 ms,左右转动角度 0°~360°,仰俯转动角度-20°~200°,左右转动速度 200 °/s,仰俯转动速度 200 °/s。 超声电机最高转速150 r/min,所测试的点均落在理论曲线附近且误差不大于一个编码脉冲即0.18°。

图5 跟踪器驱动电路实物图Fig.5 Physical map of tracker circuit

图6 电机设定角与实际转角曲线Fig.6 Curve of setting angle and actual angle of motor
5 结论
文中对一种机载光学定位测量跟踪器进行了研究。从硬件和软件两方面介绍了该系统的设计思路。实验结果表明,该系统能较精确的定位到相应的角度。该系统较好的克服了目前由电磁电机构建的跟踪器的不足,可将其应运在机载车载的随动平台搭建,监控测量,地面固定目标的定位测量等领域,具有广泛应用前景。
[1]金光.机载光电跟踪测量的目标定位误差分析和研究[D].长春:中科院长春光学精密机械与物理研究,200l.
[2]赵滨.基于机载光电测量系统的目标定位精度研究[D].南京:南京航空航天大学,2011.
[3]Ryall M.J Bridge management[M].Massachusetts:Butterworth-Heinmann,2003.
[4]杨美玲.基于图像处理的混凝土桥梁裂缝测量与分析[D].武汉:华中科技大学,2009.
[5]黄成斋.跟踪测量电视全自动调光系统 [J].光电工程,1999,26(3):17-19.HUANG Chen-zhai.A full-automatic light adjustment system for tracking and measurement television[J].Opto-Electronic Engineering,1999,26(3):17-19.
[6]Billy M,Gaddy.The KA-99 panoramic camera[J].SPIE,1976(79):190-196.
[7]Chen V C,Miceli W J.The effect of roll,pitch and yaw motions on ISAR imaging[J].SPIE,2006(3810):149-158.
[8]赵淳生.超声电机技术与应用[M].北京:科学出版社,2007.
[9]胡敏强,金龙,顾菊平.超声波电机原理与设计[M].北京:科学出版社,2005.