RMS-I型磁定位系统的研制和应用
2014-03-28李晓军王德国宋朝晖唐亮姜建胜
李晓军,王德国,宋朝晖,唐亮,姜建胜
(1.中国石油大学(北京)北京102249;2.中国石油西部钻探钻井工程技术研究院新疆克拉玛依834000)
重质油是油气资源的重要组成部分,且占较大比重。我国重质油资源丰富,目前在12个盆地发现了70多个重质油田,资源量可达300×108 t以上。蒸汽辅助重力泄油技术(SAGD采油技术),能够将重质油的采收率提高至60%左右,比常规水平井蒸汽吞吐开采提高了30%,是有效的稠油热采技术[1]。SAGD技术是一项钻井新工艺,要用到许多新的钻井工艺和设备,其中磁场测量定位装置是设备的关键。本文设计出RMS-I型磁定位系统,并对其应用情况展示研究。
1 RMS-I型磁定位系统
RMS-I型磁定位系统主要由精密磁场发生源、三轴磁场探测器、信号传输系统及地面解释计算软件组成。
1.1 精密磁场发生源研制
精密磁场发生源安装在钻头上部,随钻头一起旋转,可在区域内产生具有强度和方向的旋转磁场。如图1所示,考虑到磁场强度及磁场方向的需求,采用了24个圆柱形稀土磁体在径向方向对称分布,发生源本体采用无磁材料加工。
使用有限元分析软件对精密磁场发生源进行了结构与强度模拟[2],模拟情况如图2所示,应力分布主要集中在螺纹根部及螺纹处,磁场发生源本体机构设计满足现场使用要求。

图1 精密磁场发生源结构图Fig.1 Placing signage at precision magnetic field structure

图2 精密磁场发生源强度分析图Fig.2 Placing signage at precision magnetic field strength analysis diagram
使用有限元分析软件对精密磁场发生源磁场强度及分布情况进行了模拟,模拟情况如图3所示。磁场发生源总磁场强度:5.59×108 nT,如果磁场强度过强会导致仪器损坏,过小将会导致测量误差超出设计要求和测量距离减小。
1.2 三轴磁场探测器研制
磁场、加速度探测器作为关键部件,作用测量的磁场和重力加速度,对采集到的数据进行编码,形成数据帧,以50~100帧每秒的速度,通过RS485端口发出。同时开发形成了基于DSP架构的采集磁通门传感器、加速度传感器的测量系统,具有测量精度高、数据处理速度快,性能稳定的特点。其电路原理如图4所示。

图3 精密磁场发生源磁场强度及分布图Fig.3 Precision placing signage at the magnetic field intensity and distribution of magnetic field
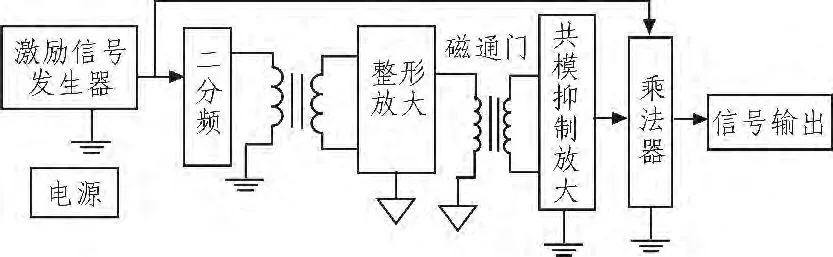
图4 三轴磁场探测器电路原理图Fig.4 Three axial magnetic field detector circuit principle diagram
1.3 信号传输系统研制
根据磁定位系统对数据传输距离、速度、布线的要求,信号传输系统采用单总线模式,将探测器传来的数据调制在电源线上,通过电源线传送到地面,地面接收器从电源线上解调出数据波形,从而实现快速连接电缆、可靠传输数据的目的。
1.4 地面计算软件
1.4.1 算法确定
自然界的磁现象均可以等效于若干个磁偶极子磁场的叠加,在特定情况下也可以等效为一个磁偶极子。简单地讲,磁偶极子就是一个圆电流,设电流强度为I,圆半径为R。对一个磁偶极子来说,往往用“磁矩”矢量来表示一个磁偶极子的量级[3]。磁矩的定义为:

如图5所示:根据毕奥-萨伐尔定律,远场P(r,θ φ)磁感应强度表达式为:

三分量表达式:
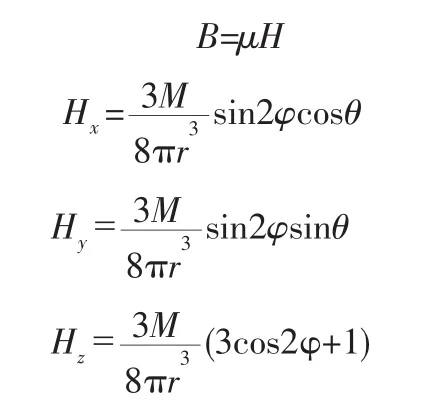
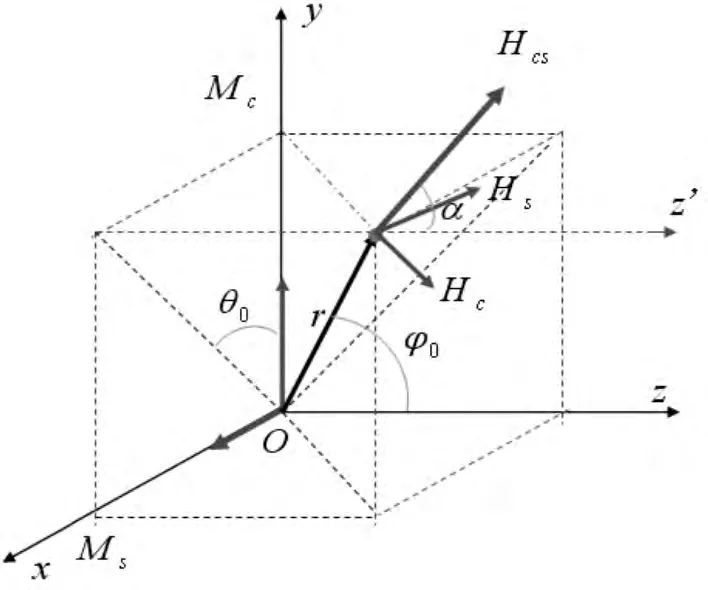
图5 P点空间磁场示意图Fig.5 Magnetic field sketch point P space
在实际钻井过程中,磁源短节随钻头处于动态旋转状态,不能直接用静态磁偶极子模型进行目标靶点定位。但是随钻头旋转的永磁体所形成的磁场可视为两个正交偶极子Mc和Ms叠加而成的总磁体Mt。假设钻头旋转角速度为ω,初始时刻永磁体与Z轴方向重合,则任意时刻永磁体转过的角度为ωt,此时与总磁场Mt等效的正交磁偶极子Mc与Ms分别为:

空间任意点P处的磁场强度由Hc和Hs两部分构成。以y轴为永磁体旋转轴,建立基于动态旋转磁偶极子模型的磁场强度空间传播模型,
由Mc所产生的磁场强度为:

由Ms所产生的磁场强度为:

当磁偶极子旋转时,所产生的磁场强度Hc和Hs仅大小发生变化,而方向不变,因此二者外积所得到的矢量方向不随转速ω变化,可以用来表征旋转磁偶极子的固有特征,即:

根据采集得到的三轴磁信号强度,由以下公式求得磁源与探测器的空间距离r,偏移角θ0,相对方位角φ0,从而确定磁源相对与探测器的相对位置(x,y,z),实现动态自动跟踪磁源目标的目的。

1.4.2 地面计算软件
地面计算软件的主要功能是将磁场探测传来的数据,从USB端口采集到计算机中,进行滤波、地磁信号分离。完成动态跟踪和精确定位计算,保存并显示数据。为轨迹控制人员提供施工依据。
开发了基于实时检测--井下校验--轨迹偏差计算,满足轨迹控制工具调整、井眼轨迹平滑要求的人机互动程序,使用C++编程语言编写,具有鼠标按钮控制,动态图形显示,直观形象分区、操作流程简单。同时在软件中加入了二次滤波程序,提高了测量精度。
1.5 RMS-I型磁定位系统性能参数
RMS--I型磁定位系统,是国内最早投入现场试验的SAGD双水平井磁定位系统,至今现场应用超过1 000小时,系统测量精度达到2~5%FS。其主要性能参数如下:探测距离3~65 m,测量精度5~10 m:2%,10~25 m:5%,工作温度-40~125℃,承压140 MPa,采样率50 Hz,波特率9 600 bps,振动20 g,冲击500 g,适用于成对水平井。
2 现场应用情况
2012年~2013年,先后在新疆油田风城油田进行了15井次的现场试验和应用。2013年5月~10月,完成了FHW3014井组、FHW337等共计9口井的现场技术服务,累计进尺4 140.38 m,仪器累计入井时间1 017小时。
2.1 FHW 3014井组现场应用情况
FHW3014P/I井属于风城油田侏罗系齐古组超稠油油藏,位于重18井区南部SAGD开放区,重18井区是由四条断层所围的孤立断块,为重20井北断裂、重1井北断裂,重43井西断裂以及风重001井断裂。齐古组顶部构造形态为断裂切割的南倾单斜,地层倾角5°~8°。目的层齐古组直接超覆沉积在二叠系之上,断块内八道湾组地层缺失。FHW3014P/I井组由西部钻探井下作业公司20947队承钻,由西部钻探定向井技术服务公司提供井眼轨迹控制、随钻测量和磁定位技术服务。
FHW3014I水平井于2013年5月4日22:00一开,5日17:10一开完钻,井深57.92 m,下入Φ339.7 mm表层套管至井深57.60 m固井候凝,5日21:00二开。7日15:00钻进至井深374 m,其中磁导向井段324.09~371.76 m,实钻井眼轨迹进入A靶窗,按地质方要求二开完钻。8日6:00下Φ244.6mm技术套管至井深371.22 m,8日10:00中完固井。9日,三开验收合格后,I井开始水平段磁导向钻进,至11日凌晨5:30,钻至702.23 m完钻,磁导向井段374.21~668.33 m。
2.2 FHW 2135井组现场应用情况
FHW3125井位于准噶尔盆地风城油田重45井区SAGD开发区。设计井深:斜深1 170.94 m,垂深477.10 m,靶前位移780.2 m,水垂比为3.8:1,是2013年风城区块水平段最长的一口井。该井由克拉玛依地质工程公司钻井13队承钻,定向井公司提供轨迹控制技术服务,磁导向仪器采用西部钻探钻井院RMS-I型磁导向系统。
FHW3125I水平井于2013年7月16日18:00一开,16日20:00一开完钻,井深57.11m,下入Φ339.7 mm表层套管至井深56.76 m固井候凝,18日11:20二开,20日0:40钻进至井深576 m,实钻井眼轨迹进入A靶窗,20日5:00下入Φ295 mm欠尺寸稳定器通井,洗井起钻,21日5:00下Φ244.6 mm技术套管至井深575.07 m,21日7:30中完固井。23日16:40,三开验收合格后,I井开始水平段磁导向钻进,25日凌晨5:30,钻至1170.94 m完钻,磁导向井段576~1143.23 m,累计进尺576.23 m。
3 结论
成功研制出由稀土永磁体磁场源发生器、三轴磁场和加速度探测器、磁定位采集分析软件、单总线信号传输系统组成的RMS-Ⅰ型磁定位系统,并形成配套的测量工艺技术。经过15井次的SAGD成对水平井现场试验应用,RMS-Ⅰ型磁定位系统性能得到全面的验证,测量精度达到国外同类仪器先进水平[7]。RMS-Ⅰ型磁定位系统的研制成功,打破了国外公司在这一技术上的长期垄断与封锁,为国内油田稠油资源的高效开发提供了有力的技术保障。
[1] 万仁溥,罗英俊.采油技术手册第八分册[M].北京:石油工业出版社,1999.
[2] 博弈创作室.ANSYS 9.0经典产品[M].北京:中国水利水电出版社,2006.
[3] 宗艳波,张军,史晓峰,等.基于旋转磁偶极子的钻井轨迹高精度导向定位方法[J].石油学报,2011,32(2):336-338.ZONG Yan-bo,ZHANG Jun,SHI Xiao-feng,et al.Based on rotating drilling trajectory precision of magnetic dipole oriented locating method[J].Journal of Oil,2011,32(2):336-338.
[4] 杜钦君,黄强.超声导航微波消融辅助机器人技术的研究[J].微计算机信息,2008(17):252-254.DU Qin-jun,HUANG Qiang.Ultrasonic navigation and microwave ablation of robotics research[J].Microcomputer Information,2008(17):252-254.
[5] 张营,徐海贵,王春香.基于磁阻传感器的智能车辆定位系统[J].仪表技术与传感器,2008(11):1-3,7.ZHANG Ying,XU Hai-gui,WANG Chun-xiang.Intelligent vehicle positioning system based on magnetic resistance se-nsor[J].Instrument Technique and Sensor,2008(11):1-3,7.
[6] 郑小林,李金,候文生,等.应用磁传感器阵列定位跟踪消化道诊疗胶囊[J].光学精密工程,2009(3):576-582.ZHENG Xiao-lin,LI Jin,HOU Wen-sheng,et al.Application of magnetic sensor array location tracking the digestive tract diagnosis capsule[J].Optical Precision Engineering,2009(3):576-582.
[7] 陈海峰,张少博,刘英元.振动测量误差影响因素分析[J].火箭推进,2011(1):61-64.CHEN Hai-feng,ZHANG Shao-bo,LIU Ying-yuan.Analysis of error factor in vibration measurement[J].Journal of Rocket Propulsion,2011(1):61-64.
