海上舰船目标检测预警系统
2014-01-16李志国
李志国,姚 鹏
(西北工业大学 航海学院,陕西 西安 710072)
在海上的传送原油的油管经常会遭到过往船只的破坏,因此在油井附近安装一种能检测船只目标并实时预警给上位机的系统很有必要。国内外有许多使用图像和视频的方法来检测舰船,但在功耗、硬件实现等方面受到制约。
由于舰船在行驶的时候会发出辐射噪声,而且有一定的特征规律,而海面无船时的噪声则小的多,并且是随机噪声。因此利用这两者之间的区别,可以使用自相关函数来提取目标特征。由于系统最终要安装在浮标里,而浮标能够长时间稳定工作的最重要的条件是功耗低。因此,本系统以低功耗芯片C5535和A3P060为核心处理芯片,通过自相关算法完成目标的检测和预警。湖上和海上试验结果表明,该系统在目标检测概率和系统功耗两个主要指标上满足要求,具有实际应用价值。
1 硬件系统设计
1.1 数字处理模块
是整个系统中最核心的部分,它承担着数据采集、检测算法、与上位机通讯等主要任务。本系统中采用FPGA+DSP的经典搭配方式,FPGA负责数据的采集,低通滤波和降采样以及北斗模块的控制。DSP则用来进行复杂的算法和与上位机进行数据交换。这样既利用了FPGA适合做逻辑控制的特点,也让DSP适合做算法的优势体现的淋漓尽致。该系统中DSP采用TI公司的超低功耗系列中的最新一款芯片TMS320C5535。该芯片具备FFT硬件加速器,官方资料显示,在运算时间和功耗两个方面,利用CPU计算1024点的FFT是硬件加速器计算的2.2至3.8倍和4至6倍。该芯片为了节省功耗,不配备数据和地址总线,但配置了丰富的外设,便于和其他芯片之间通信。FPGA采用Actel公司的A3P060,其独特的熔丝FLASH结构使其功耗大大降低。该系统中,DSP和FPGA使用I2S总线和GPIO进行数据传递。系统整体框架如图1所示。

图1 系统框图Fig.1 System block diagram
1.2 模拟信号采集电路
模拟信号的采集芯片选用ADI公司的AD7694。AD7694是一款16位、250 kSPS、电荷再分配、逐次逼近型模数转换器(ADC),采用2.7 V至5.25 V单电源(VDD)供电。由于舰船辐射噪声的频率在10 kHz以下,所以250KSPS的采样速率完全能满足要求。其数字接口是非常简单通用的SPI接口,在CNV的上升沿,AD开启转换,CNV高电平保持时间满足要求时,就可以将其电平拉低,在下降沿,转换的结果按MSB至LSB的顺序沿着时钟信号SCK输出在SDO信号线上。AD转换需要的参考电压由ADR54450来提供。原理图设计如图2所示。
1.3 北斗电源开关电路设计
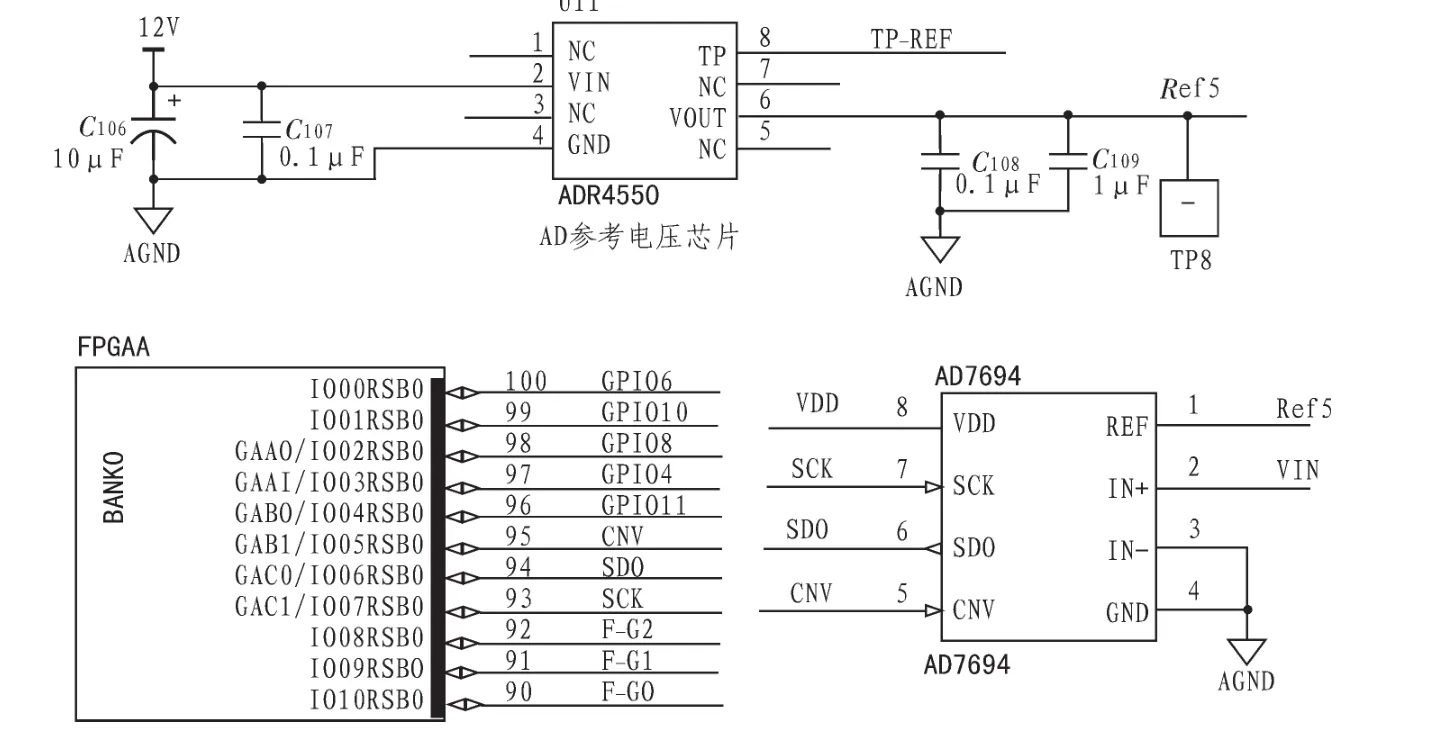
图2 模数转换电路原理图Fig.2 Analog-digital conversion circuit Schematic
DSP与上位机的通信由北斗模块作为中介完成,由于北斗模块功耗非常大,电流达10 A左右,因此只有在接收命令和传送结果时才将其供电开关打开,由于普通的模拟开关芯片的参数难以满足要求,这里使用PMOS三极管作为开关,如图3所示。FPGA通过IO信号SW控制Q2的导通。当SW为高电平时,Q2导通,Q1基极电平为 5.1k/(12k+5.1k)*12 V=3.6 V>0.7 V,Q1也导通,这时北斗模块开始供电并工作。当SW为低电平时,Q1断开。北斗模块进入待机状态。

图3 北斗电源开关Fig.3 Beidou power switch
1.4 RS232总线电路设计
DSP与北斗模块采用RS232总线通讯,DSP配置了UART总线控制器,因此只需添加一个UART转RS232转换芯片即可,这里选择MAX公司的MAX322,其接口简单易用。
2 系统软件设计
2.1 舰船目标检测方法及仿真
国内外有许多从时域、频域和联合分析,发展起来的短时傅里叶变换、小波变换等,但是运算量非常大,文中提出来一种适合在硬件系统上实现的方法:自相关法。信号的相关函数是在时间域内描述随机过程的重要特征。自相关函数是随机信号在不同时刻的值之间的依赖性的量度,是一个很有用的统计平均量,其定义为:
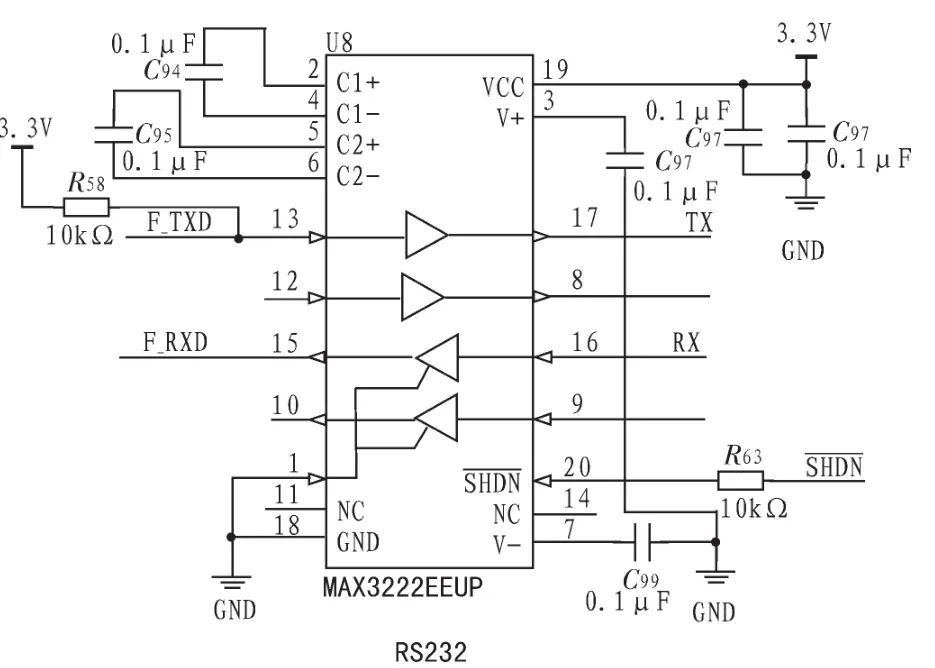
图4 总线转换芯片Fig.4 Bus converter chip

式中E表示数学期望,*表示共轭值,m为时间滞后数。
为了验证该方法的可行性,选取在昆明抚仙湖采集的噪声数据进行matlab仿真。数据采样频率为12.5 kHz,分析带宽为0~5 kHz,样本长度为1 024点,结果进行归一化处理。通过对三组的自相关处理结果进行对比和分析,得:当目标(A型和B型舰船)由远及近时,其相关峰值越来越大,而背景噪声虽然也有一定的峰值,但其峰值只是海面有舰船时峰值的千分之一,只要设置合理的阈值,就可以检测出目标。
2.2 软件流程

图5 A型船噪声自相关Fig.5 A type of ship noise autocorrelation

图6 B型船噪声自相关图Fig.6 B type of ship noise autocorrelation

图7 背景噪声自相关图Fig.7 Background noise autocorrelation
整个软件系统由两大部分构成,DSP 软件由C 和汇编两种语言,这样既方便对外设的操作,也利于复杂算法的实现。FPGA采用顶层设计方法,这样方便子模块的调用和参数的修改。整个软件系统的流程框图如图8所示,主要包括:系统初始化,设置各模块的初始化状态;FPGA完成数据的实时采集、滤波和降采样;DSP完成舰船检测的相关算法;DSP通过北斗模块与上位机通讯。
数据详细处理过程为:FPGA在控制AD在完成一个采样点的串并转化之后,进入流水线的FIR低通滤波器,滤波器的低通截止频率为10KHz,之后降采样输出给DSP。由于系统对实时性要求很高,若采用CPU中断或者查询方式,则DSP执行算法的过程会被不停的打断。因此采用I2S总线的DMA模式与FPGA进行数据传递,DMA意思是直接内存访问,是指不经由CPU而直接从内存中存取数据的数据交换模式。当I2S使用DMA控制器控制数据的收发过程时,MCU会将发送的控制权交给DMA硬件控制器,从而在数据发送的时间中去完成算法及其他事务。在DSP中开辟两块数据缓冲区,采用乒乓模式轮流接收DMA传来的数据,这样可以保证DSP处理数据的完整性。

图8 软件系统流程Fig.8 Flow chart of software system
3 结束语
系统样机首先在实验室上电调试,把全部功能都调通以后,在昆明抚仙湖和珠海现场试验,在船只距离浮标约1.5公里处时,可以检测到船只的状态,经多次测试,检测概率约为90%,满足系统的技术指标要求。经测试功耗约150 mW,可以长时间工作。
[1]王魁,张效民,赵延安,等.基于自相关特征的舰船大小识别方法[J].声学技术,2011,30(5):463-465.WANG Kui,ZHANG Xiao-min,ZHAO Yan-an,et al.Based on the size of ship autocorrelation feature recognition method[J].Acoustic Technology,2011,30(5):463-465.
[2]刘义海,张效民,赵延安,等.一种低功耗水下目标识别系统设计[J].计算机测量与控制,2012,20(2):470-473.LIU Yi-hai,ZHANG Xiao-min,ZHAO Yan-an,et al.A lowpower underwater target recognition system design[J].Computer Measurement&Control,2012,20(2):470-473.
[3]沈广楠.舰船目标识别技术研究[D].哈尔滨:哈尔滨工程大学,2012.
[4]鄢社锋,马远良.传感器阵列波束优化设计及应用[M].北京:科学出版社,2009.
[5]严胜刚.基于DSP和FPGA水下目标主动跟踪系统硬件设计[J].鱼类技术,2009,17(1):31-34.YAN Sheng-gang.Underwater target based on DSP and FPGA hardware design active tracking system[J].Fish Technology,2009,17(1):31-34.
[6]张宝宜.基于DSP的被动声呐信号检测技术应用研究[D].西安:西北工业大学,2007.