管道清管器电磁跟踪定位系统接收机的设计与实现
2014-01-15艾毅然梁华庆青美伊
艾毅然,梁华庆, 史 超, 青美伊,于 达
(1.中国石油大学(北京)地球物理与信息工程学院,北京 102249;2.中国石油大学(北京)机械与储运工程学院,北京 102249)
油气管线在施工过程中,不可避免地要进入砂石、泥土等施工杂物。管线投产后,也往往会积存一定的泥浆、凝析液及腐蚀产物,这些东西将影响输送产品质量,堵塞油气管道,降低管线输送效率,腐蚀管线内壁和堵塞仪表设备,甚至会带来输送介质泄露的严重后果。因此管线在投产前或运行一定时间后,必须进行清管[1]。
对于清管作业来说,在清管器进入到管道以后,需要实时追踪清管器在各个时刻的位置。尤其在清管器发生卡球事故时,需要及时准确地确定清管器卡堵点所处的位置,以便尽快采取措施,避免更大的损失[2]。
目前常用的监测方法是在清管器上安装一个低频磁脉冲发射装置,在地面上利用接收机采集此磁脉冲信号,以此进行跟踪定位[2]。
上述方法在技术上的难点之一是微弱磁脉冲信号的准确提取问题。在均匀介质中,磁脉冲信号强度随传播距离的三次方急速衰减[3]。当距离较远时,微弱的磁信号完全被环境电磁干扰和检测电路本身的固有噪声所淹没,无法准确检测。在油气管道清管器电磁智能跟踪系统中,清管器发出的低频磁脉冲信号,还需穿过金属管道,其幅度衰减比空气中的要严重得多。因此,微弱磁信号的实时检测与正确提取,是实现油气管道清管器准确跟踪定位的关键。
国外通过多年的经验积累,形成了一套系统的行之有效的追踪方法,对于清管器的跟踪定位精度较高,但其核心技术都处在保密状态。国内起步较晚,存在的问题主要是微弱信号检测精度,使得目前跟踪的距离还不能完全达到实际工程测试的需求[4]。
本文主要针对信号低频微弱特性,提出了清管器电磁跟踪定位系统接收机的总体方案,研制了具有低噪声、窄通带、高精度的信号采集电路,实现了对清管器低频磁场信号的精确检测。
1 清管器电磁跟踪定位原理与方案
1.1 跟踪定位原理
管道清管器电磁跟踪定位原理[5-7]示意图如图1所示。
沿着埋地管线布置多个清管器接收机。在清管器通过时,当接收机检测到清管器上发射装置发射的低频磁脉冲信号后,通过GPS定位模块进行定位,将位置信息上传到服务器。用户可以通过访问服务器,对清管器的位置进行实时追踪。

图1 管道清管器电磁跟踪定位系统示意图Fig.1 Schematic diagram of the electromagnetic tracking and locating system for pipeline pig
1.2 跟踪定位接收机的组成
根据低频磁脉冲信号特点,设计跟踪系统接收机,其主要由磁感应线圈、前置放大电路、滤波放大电路、A/D转换电路、定位模块构成,如图2所示。
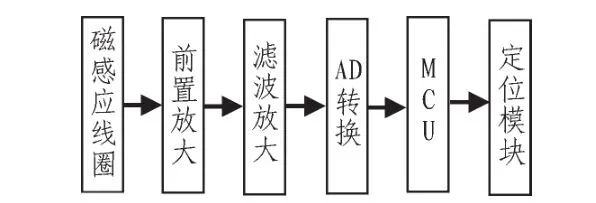
图2 管道清管器跟踪定位系统接收机框图Fig.2 Block diagram of the tracking and locating system receiver for pipeline pig
各模块的作用为:磁感应线圈将磁场信号转化为电信号;前置放大电路和滤波器放大电路通过放大、滤波,将磁感应线圈输出的低频微弱信号转换为模数转换器能测量电信号;模数转化电路将模拟电信号转化为数字信号;MCU对AD转换的结果进行分析,若检测到所设定的20Hz低频信号,则通过通信接口将定位的指令发送给GPS定位模块,对清管器进行定位。
2 接收机电路设计
2.1 前置放大电路
前置放大电路选用低噪声、高精度、低功耗仪表放大器AD620,对磁感应线圈转化得来的电信号进行放大。在仪表放大器后面加一级跟随电路。跟随电路在整个电路中起到缓冲的作用,它可以有效减少信号在前级输出阻抗上的损耗。
2.2 滤波放大电路
由于磁感应线圈输出信号为静止的地磁场和低频磁脉冲信号的叠加,在使用磁感应线圈测量低频磁脉冲信号时,首先采用图3所示的带增益的正反馈型二阶有源高通滤波放大电路,既可以滤除地磁场直流分量,又可以有效的放大有用信号[8]。
为了有效地检测出低频的20 Hz有用信号,抑制高频干扰,提高信噪比,选用8阶巴特沃斯低通滤波器,由四级二阶正反馈型低通滤波放大电路串联构成。二阶正反馈型低通滤波放大电路如图4所示[8]。
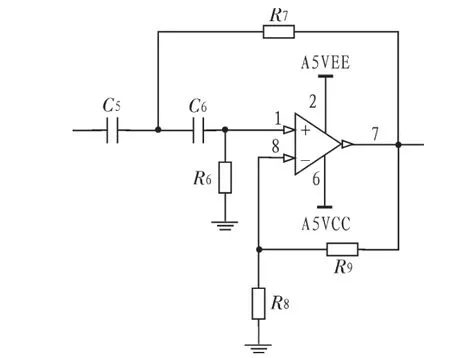
图3 二阶有源高通滤波放大电路Fig.3 Second-order active high-pass filter amplifier circuit
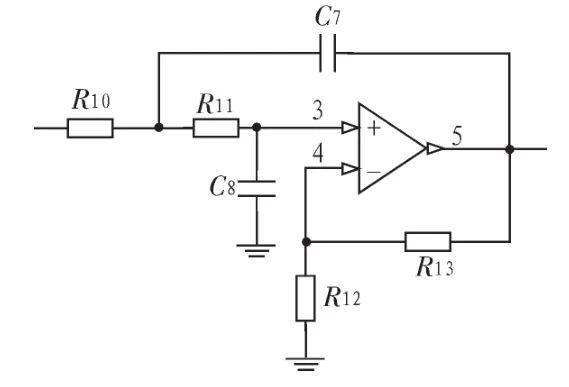
图4 二阶有源低通滤波放大电路Fig.4 Second-order active low-pass filter amplifier circuit
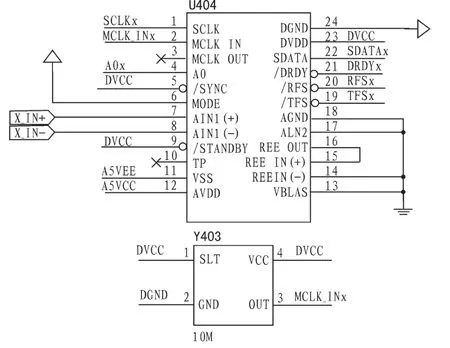
图5 模数转换电路Fig.5 Analog to digital conversion circuit
图5 所示的模数转换电路,选用高精度24位AD芯片AD7712,将放大滤波后的信号转换成数字信号,通过SDATA引脚传送给MCU。
2.3 GPS定位模块
定位模块以SIM908为核心,由Cortex-M3单片机进行控制。在接收到定位指令后,GPS定位系统将该点经纬度上传到服务器,然后通过服务器调用Google API,在Google地图上进行显示,这样就可以追踪清管器的具体位置。电脑和手机可以通过访问服务器,实时获取清管器的位置和运行轨迹。
3 接收机性能测试
3.1 电路噪声
为了测试接收机信号采集电路的噪声性能,对采集电路的输入短路噪声进行了测试,实测输入噪声是1.49 μV。噪声性能可以满足实际测量需求。
3.2 滤波特性
用频率响应分析仪PSM1700对所设计的电路的幅频特性进行测量,结果如图6所示。

图6 电路幅频特性Fig.6 Amplitude-frequency characteristics of the circuit
20 Hz频率处增益为53.09 dB;而1 Hz以下信号的增益小于5.141 dB,相对与通带信号衰减大于47.949 dB;而50 Hz以上信号的增益小于15.01 dB,相对与通带信号衰减大于38.08 dB。达到了预定的设计要求。
4 实测结果与分析
在完成了对接收机的联调后,对其进行室外测试。将发射机放置在壁厚为12.7 mm的套管中,套管两端用金属罩封闭来模拟实际中无限长的输气输油管道。发射机产生频率约为20 Hz的交变磁场信号,在磁感应线圈与发射机相距0.6、1.2、2.4、3.6、4.8、7、8、9、10 m 时, 分别用 24 位高精度采集仪DP240和自制的接收机采集电路采集此磁场信号。图7示出3.6 m和9.0 m时,采集的信号与处理的结果。图中(a)为高精度24位采集仪DP240采集的原始信号的时域波形,(b)为(a)中信号的频谱,(c)为自制的接收电路采集的信号的时域波形,(d)为(c)中信号的频谱。
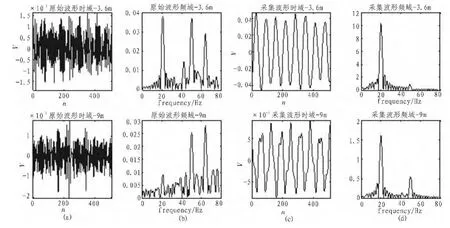
图7 3.6 m和9 m时采集的信号与处理结果Fig.7 The results of the signal acquisition and processing results at 3.6 m and 9 m

图8 20 Hz信号的峰峰值随距离变化Fig.8 Peak-peak value of 20 Hz signal changes with distance
从图7可以看出,随着距离增大,20 Hz信号的幅度急剧衰减,当距离超过3.6米后,信号已被环境电磁干扰(主要是50 Hz工频)和噪声所淹没,难以分辨。自制的采集电路可以有效地滤除20 Hz以外的噪声和干扰,极大地提高了信噪比。
图8所示,为接收机检测的磁场信号的峰峰值随收发距离变化曲线,由图可见,信号峰峰值基本符合随距离的立方衰减的规律,所设计的接收机,可实现10 m距离的可靠测量。
5 结束语
文中在深入分析被采集信号特点的基础上,设计了管道清管器电磁跟踪定位系统接收机,实现了低频磁脉冲信号的高精度采样,有效地解决强干扰大噪声背景下微弱磁场信号的检测问题。
利用GPS进行清管器定位可以保证跟踪定位的准确性、实时性以及便捷性。
所设计的管道清管器电磁跟踪系统,2014年4月已成功地应用于新建的渤西项目登陆管道清管作业中,有效测距范围达10 m,完全可以满足实际清管作业的需求。
[1]孙万章.清管技术及其发展综述 (一)[J].城市燃气,1994,3(9):25-28.SUN Wan-zhang.Pigging technology and development review(one)[J].Urban Gas,1994,3(9):25-28.
[2]王铎,刘晓艳,王康,等.清管器追踪技术研究[J].管道技术与设备,2013(1):41-43.WANG Yi,LIU Xiao-yan,WANG Kang,et al.Pig tracking technology research[J].Pipeline Technique and Equipment,2013(1):41-43.
[3]梁华庆,耿敏,时东海,等.旋转磁场井间随钻测距导向系统中微弱频变信号的检测方法[J].石油学报学报,2013,37(4):83-87.LIANG Hua-qing,GENG Min,SHI Dong-hai,et al.A weak and frequency-varying signal detection method for rotating magnet ranging system[J].Journal of China University of Petroleum,2013,37(4):83-87.
[4]李增铨.我国的清管技术及发展方向[J].天然气工业,1984,4(4):61-65.LI Zeng-quan.The pigging technology and the development direction of our country[J].natural gas industry,1984,4(4):61-65.
[5]闫晓茹,张涛,杨春生,等.清管跟踪定位系统的研究[J].机械,2004,31(4):63-64.YAN Xiao-ru,ZHANG Tao,YANG Chun-sheng,et al.Research of pig tracking system[J].Machinery,2004,31(4):63-64.
[6]Farque J A.Magnetic pulsing technique for tracking,locating pigs[J].Pipe Line Industry,1994,77(1):59-60,62.
[7]McDonnell Shamus,Bhatia Arti,Nickle Randy.Pipeline pig tracking through the internet[C].Proceedings of the Biennial International Pipeline Conference, 2004(1):709-712.
[8]远坂俊昭.测量电子电路设计—滤波器篇[M].彭军,译.北京:科学出版社,2006.