基于MMC的铁路功率调节器环流抑制策略
2014-01-15王之赫吴学智李金科王卫安
王之赫,荆 龙,吴学智,李金科,王卫安
(1.北京交通大学国家能源主动配电网技术研发中心,北京 100044;2.南车株洲电力机车研究所有限公司,株洲 412001)
引言
近年来,我国电气化铁道得到飞速发展,但是,铁路牵引供电系统这一特殊负荷不平衡情况严重,还会带来多种类型的谐波,由其产生的负序、谐波电流,无功功率对公用电网的电能质量带来严重影响[1-3]。
铁路功率调节器 (railway static power conditioner,RPC) 是由日本学者 1993 年提出的概念[4],其具有控制变电所两相有功功率、无功功率和谐波电流的能力。传统的RPC多采用两电平电压源型变流器(VSC),而由于模块化多电平变换器(MMC)的拓扑[5]可以直接应用于中高压大功率领域,使得MMC应用在RPC领域成为可能。将MMC换流器背靠背连接,使其能够实现RPC的全部功能,这里将其称为多电平铁路功率调节器(multilevel railway static power conditioner,MRPC)。
MMC中的桥臂环流是不同相之间能量交换以及直流电容电压控制的载体。但环流分量会造成桥臂电流畸变、功率开关器件过热等不良影响。MRPC应用领域中,其环流又与传统MMC环流存在不同之处,MRPC的环流与公共直流母线电流直接叠加,会造成MRPC系统失稳,所以有效地控制MRPC 桥臂环流显得十分重要[6]。
文献[7]给出了一种基于MMC环流模型的通用环流抑制策略,该方法实现原理简单,无需负序坐标变换和相间解耦环节,通用性强。但是该方法原理是补偿桥臂电感上环流引起的压降,属于开环控制,不能充分地抑制环流。文献[8]将三相环流分解为两个直流分量进行环流抑制,该方法需用到负序坐标变换和相间解耦环节,控制系统运算量大。文献[9]提出一种基于改进阶梯波调制的环流抑制控制策略,适用于向无源网络供电的应用场合,但是其控制系统处理速度很难达到要求。
本文首先分析了三桥臂MRPC的工作原理,在此基础上建立了MRPC桥臂环流的数学模型,并对MRPC中环流形成机理进行了分析,然后提出了基于PR调节器的MRPC环流抑制策略,该方法采用比例谐振闭环控制,降低了补偿延时,改善了环流抑制效果。最后利用RT-LAB实时仿真平台对该环流抑制方法进行了验证。
1 MRPC系统介绍
1.1 MMC的工作原理
典型的三相MMC结构如图1(a)所示,MMC由3个桥臂组成,每个桥臂由2n个子模块和2个桥臂电感串联构成,桥臂电感的连接点构成对应相桥臂的输出端[10]。
MMC的子模块由一个IGBT半桥和直流电容构成,如图1(b)所示。MMC的子模块具有两种输出电平,通过各个子模块的电容电压来支撑直流母线电压。通过合理选择主开关器件的通断状态,可实现MMC变流器的交流侧多电平输出。

图1 MMC拓扑结构
1.2 RPC的工作原理
本文中牵引供电补偿系统包括V/v牵引供电系统和RPC补偿系统两个部分,结构如图2所示。
V/v变压器将一次侧110 kV三相电压转换为二次侧两个55 kV单相电压,称为T相和M相,再经过自耦变压器将55 kV转换为27.5 kV给电力机车供电,其中T相电压UT超前M相电压UM60°。
其中RPC的工作原理是通过变流器内开关变换,得到一个幅值和相位均可独立调节的等效受控电压源,进而可以对铁路牵引变压器二次侧两相绕组接入点的无功电流、谐波电流实现独立补偿;同时,RPC通过互联的直流环节可以实现两相之间有功功率的转移。
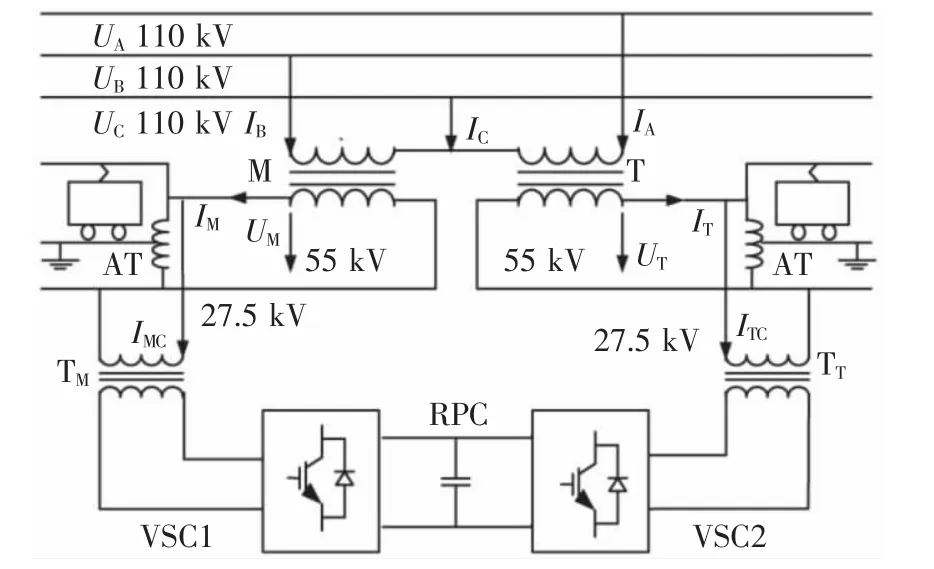
图2 V/v变压器和RPC组成的补偿装置结构
1.3 三桥臂MRPC设计方案
针对铁路牵引供电系统,RPC的实现方式有多种拓扑形式:RPC可以利用半桥电路、背靠背四桥臂变流器、两相三桥臂变流器来实现。3种方案具体对比见表1,由于三桥臂MRPC直流电压要求最低,不需要隔离变压器,且整个装置可以当作一个三相系统进行控制,控制方法上更加灵活,综合考虑,本文选用三桥臂变流器作为MRPC的拓扑。

表1 MRPC方案对比
如图3所示,三桥臂MRPC拓扑结构包含T、M和N 3个桥臂,其中N相桥臂作为T、M相共同的功率流动的回路。三桥臂MRPC无需隔离变压器,每个桥臂的中点直接与自耦变压器相连接。
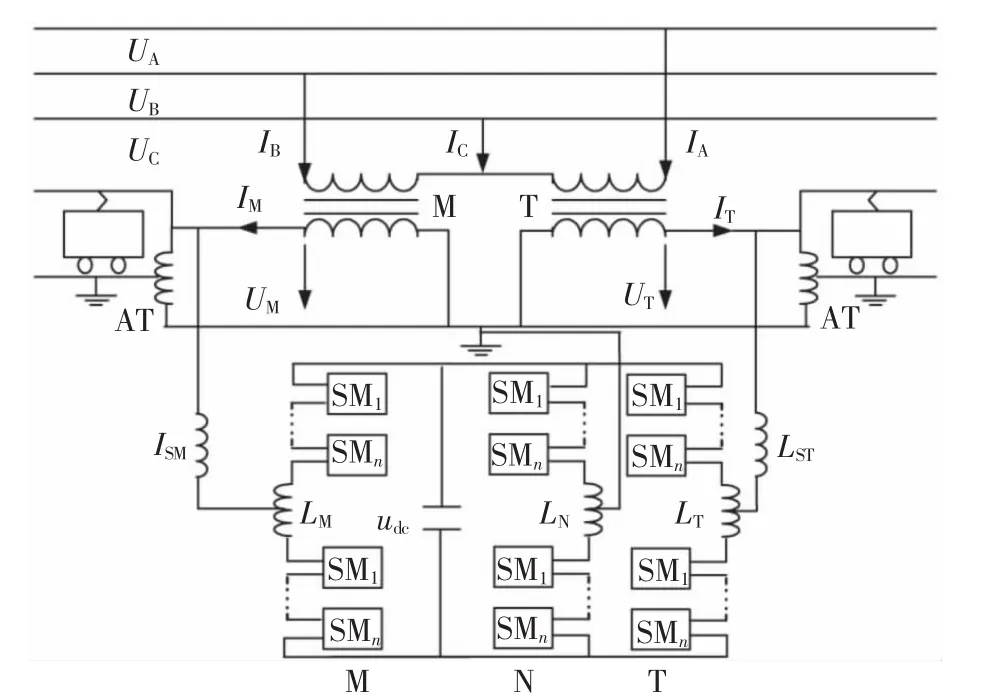
图3 三桥臂MRPC拓扑结构
2 MRPC环流分析
由于三桥臂MRPC系统内部各个子模块都含有储能电容,而MRPC的瞬时能量都储存在这些电容之中,公共直流母线在任意时刻都在给功率单元中的储能电容进行充放电,从而实现了交流侧与直流侧能量的传递和交换,其载体即为环流。
2.1 MRPC环流模型
将各相的上、下桥臂电流中除了承担交流网侧输出电流分量之外的偏置分量定义为环流,环流仅在桥臂内部流动,并不向交流网侧输出有功功率。图4为三桥臂MRPC系统的环流分布示意,可以看出环流分为桥臂内环流和桥臂间环流。

图4 MRPC环流分布示意
定义变量符号(以T相为例):环流为izT,上桥臂电流为ipT,下桥臂电流为inT,交流输出电流为isT,T相输出电流为iT,建立环流模型如图5所示。
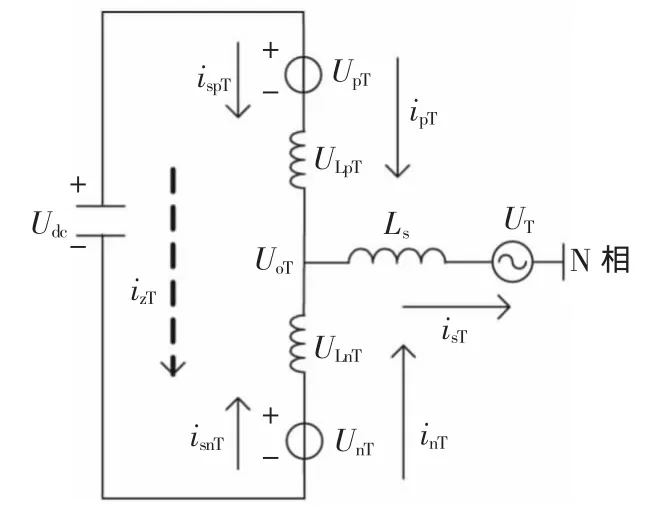
图5 MRPC的T相环流模型
由于MRPC结构具有严格的对称性,每个工频周期内上、下桥臂的等效阻抗近似相等,交流网侧电流isT在上、下桥臂之间平均分配,图中ispT和isnT分别是上、下桥臂电流的交流分量,根据基尔霍夫电流定律,可得各种电流关系满足

在MRPC的环流模型中,环流分量izT相当于两个流控电压源,得到图6中的环流等效模型。桥臂电感LpT、LnT在激励源izT的作用下,会产生环流压降ULpT、ULnT,设定它的电压参考方向与端口电压方向相同。
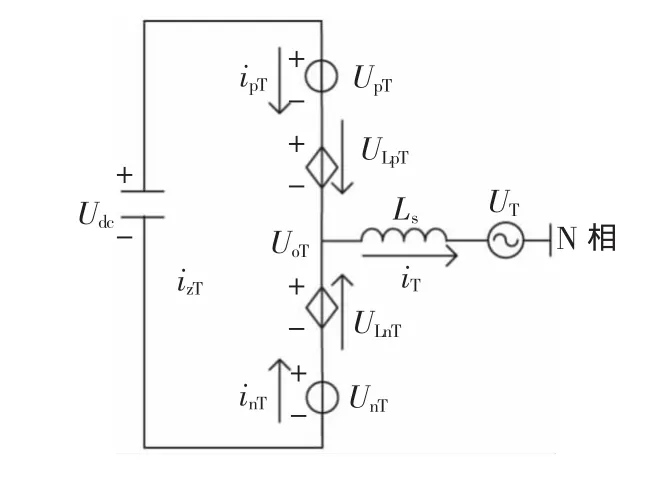
图6 MRPC的T相环流等效模型
由图6和式(1)可以得到环流表达式为

由式(2)可知:增大桥臂电感参数值可以抑制桥臂环流幅值大小,同时可以抑制桥臂电流中的低次谐波分量;但增大桥臂电感值也会带来一些不足,例如会降低系统控制的频率响应速度,增大装置体积,提高装置成本。
2.2 MRPC环流机理分析
由于MRPC的控制变量较多,在不影响分析结论的前提下,为简化分析,做如下假设:
(1)V/v变压器输出侧两相电压和电流波形纯正弦,如式(3)所示。
(2)忽略开关频率及其整数次附近的谐波分量。
(3)公共直流母线电压Udc恒定。
(4)主电路元件为理想元件,无损耗。
(5)子模块电容能量不变,即
式中:Um为输出相电压的峰值;IT、IM为网侧电流的峰值;φM、φT分别为 T、M 相输出功率因数角。
MRPC的每个桥臂的环流izj是MRPC输出有功和无功功率的载体,MRPC直流母线侧通过桥臂上的环流给每个子模块的直流电容充电放电。假设功率单元的直流电容储能总量恒定,则得到环流表达式为

由式(4)得到MRPC的两相环流为

由式(5)可知,MRPC的环流包括两个部分:一是有功功率造成的直流部分,称作有功环流分量izd;二是无功功率造成的二倍频分量,称作无功环流分量izq,分别表示为
实际MRPC系统的功率单元利用子模块电容作为能量贮存器件,子模块电容电压波动较大,会给系统带来不稳定,所以在环流控制中需要叠加一个电容均压控制分量izav,达到子模块电容均压的作用。每相桥臂间的有功电流分量izaL的作用是维持桥臂之间有功功率的传递,传递的过程实质上也是子模块电容均压的过程。
环流表达式为

MRPC传输功率的过程影响了式(7)中有功环流分量izdj和无功环流分量izqj,其中三相无功环流分量之间呈负序规律对称分布,相位互差120°,这两种环流无法通过控制手段消除,称为不可控环流部分。利用控制可以消除的环流分量是相间环流分量izaLj和平均电压控制分量izavj,称为可控环流部分,同时该类环流也是子模块电容均压控制的载体。
3 MRPC桥臂环流抑制策略
本文提出一种基于PR调节器的MRPC环流抑制方法,该方法采用PR闭环控制,可以降低补偿延时,改善环流抑制效果。
由于子模块电容电压控制是MRPC系统正常运行的基础,也是环流抑制策略研究的基础,本文采用一种基于载波移相调制策略的闭环均压控制策略,子模块电容电压控制包括每一相电容电压平均控制和每个子模块电容电压平衡控制,具体控制框图如图7所示。
电容电压平均控制由电压外环和电流内环组成。电压外环控制各相桥臂中直流电容电压平均值跟踪参考值;电流内环控制实际环流跟踪环流参考值。最终生成电容电压平均值修正量Varef,将补偿的电压叠加在调制波上。
电容电压平衡控制是采样各子模块电容电压,与参考值相比较,所得偏差经比例调节器后,得到修正量。鉴于桥臂电流方向不同对电容充放电过程的影响也不同,所以需要增加桥臂电流检测环节,将上桥臂电流与0相比较,如为正,电容电压修正量为正,反之为负,从而得到电容电压修正量Vbref。

图7 基于PR调节器的环流抑制策略实现框图
由前文分析可知,MRPC的环流中包含直流分量和二倍频分量,由于环流中直流分量是有功功率传输的载体,不需要抑制,而PR调节器只对交流分量起作用,故可用于控制环流中二倍频交流分量。本文所采用的控制策略主要是利用PR调节器控制环流中的二倍频分量和高次谐波分量。
其中二倍频分量提取采用基于二阶广义积分器的方法,具体提取策略如图8所示。二倍频分量提取包含两个重要环节,一是运用二阶广义积分器(SOGI)提取角频率为ω0的交流分量,此处ω0=200π;二是利用低通滤波器,滤除输入信号中的高频谐波分量。
由于输入信号x(t)主要含有二倍频分量和直流分量,同时含有少量谐波分量。通过SOGI提取二倍频分量后,在输入信号中减去该分量,之后剩余信号主要是直流分量和高频谐波分量,继续通过低通滤波器滤除高频谐波,从而获得环流中的直流分量,此时将该直流分量从原始输入信号里减去,即可获得二倍频交流分量和高频谐波[11-12]。
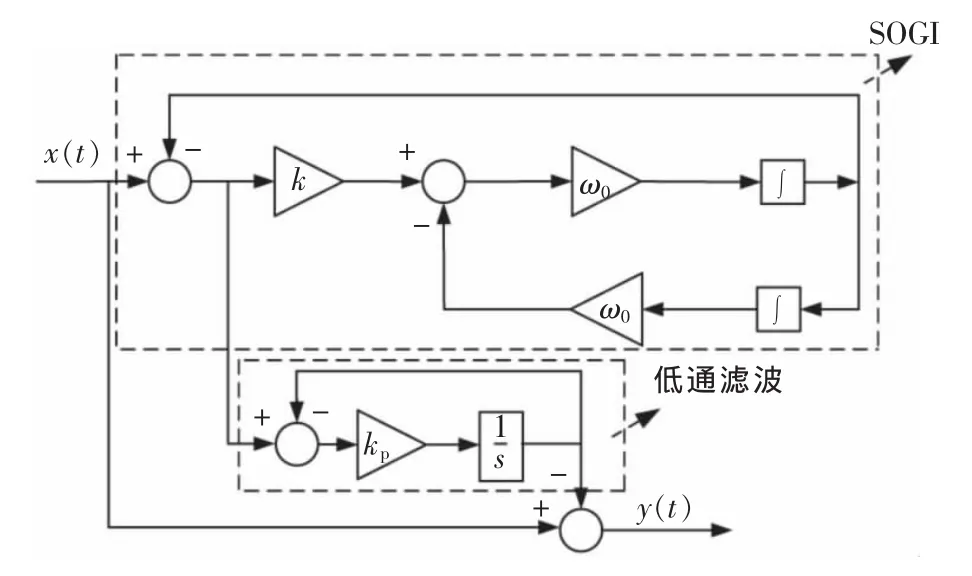
图8 二倍频分量提取方法
图7 输入信号经过上述提取方法后获得二倍频分量和高频谐波分量,该交流分量与参考值做比较经过PR调节器后可获得用于抑制环流的调制波,将其叠加到原有调制波上,从而达到抑制环流的效果。又因环流的谐波主要是100 Hz的整数倍,因此把不同谐振频率(100 Hz整数倍)的PR调节器叠加到一起,即可达到抑制环流的谐波分量的目的。
本文中采用的PR调节器传递函数为

设定PR调节器的截止频率ωc=2,陷波角频率ω0=200π;kp=2;kr=500。 得到系统的 bode 图如图9所示。通过bode图可知,在ω0=200πrad/s时,幅值被放大,因此可以实现对二倍频信号的跟踪。

图9 PR调节器bode图
4 RT-LAB实时仿真验证
为验证前文MRPC环流分析以及基于PR调节器的环流抑制策略的正确性和有效性,以神朔铁路阴塔变电站为例,搭建了基于RT-LAB的三桥臂MRPC实时仿真平台,仿真模型结构图如图3所示,仿真参数设置如表2所示。仿真工况为:M相负载:P=18 MW,Q=0 Mvar,T 相负载:P=1 MW,Q=0 Mvar。
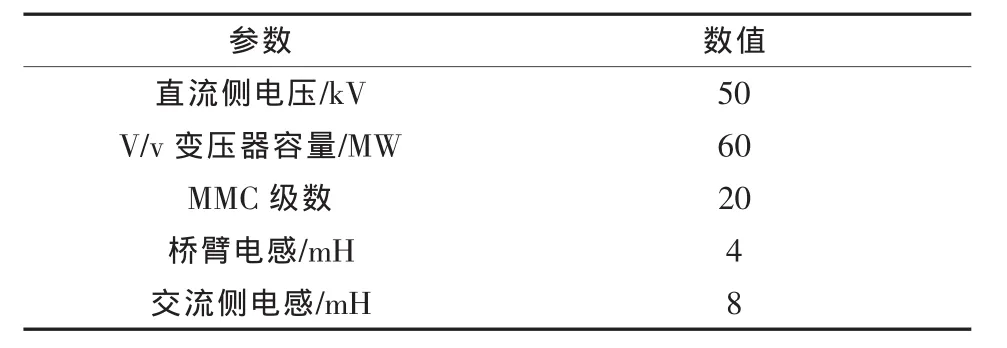
表2 三桥臂MRPC参数
仿真结果如图10所示:图10(a)为各桥臂环流仿真结果;10 s前,系统启用子模块电容均压控制策略,未启用环流抑制策略,此时系统中二倍频环流严重;10 s后在均压控制基础上启动本文提出的基于PR调节器的环流抑制策略,各桥臂环流明显降低。图10(b)为T相桥臂子模块电容电压仿真结果;可见整个过程中子模块电容电压在额定电压5 kV附近波动,保持系统稳定,10 s启动环流抑制策略后子模块电容电压波动幅度降低,说明环流抑制策略可以改善子模块电容均压控制效果。图10(c)是网侧电流仿真结果,在MRPC控制作用下,补偿两相不平衡负载,使得网侧电流满足三相平衡,10 s启动环流抑制策略后在经过3个周波后网侧电流保持平衡,系统保持稳定。

图10 环流抑制过程仿真结果
5 结语
本文结合三桥臂MRPC的电路结构和工作原理,推导了MRPC内部环流数学关系,在此基础上对MRPC环流机理进行了分析。提出了一种基于PR调节器的MRPC环流抑制策略。最后在RTLAB实时仿真平台上对环流抑制策略进行了实时仿真验证,结果验证了该控制方法能够显著抑制桥臂环流,响应速度快,并能保证MRPC系统稳定运行。
[1]马伏军,罗安,吴传平,等.V/V牵引供电系统中铁路功率调节器的控制方法研究[J].中国电机工程学报,2011,31(13):63-70.
[2]Morimoto H, Ando M, Mochinaga Y,et al.Development of railway static power conditioner used at substation for shinkansen[C]//Power Conversion Conference the Industry Applications Society of the IEE.Osaka,Japan,2002:1108-1111.
[3]张定华,桂卫华,王卫安,等.新型电气化铁道电能质量综合补偿系统的研究及工程应用[J].电工技术学报,2009,24(3):193-196.
[4]Mochinaga Y,Takeda M,Hasuike K.Static power conditioner using GTO converters for ac electric railway[C]//Proc Power Conversion Confer ence.Yokohama,Japan,1993:641-646.
[5]Marquardt R,Lesnicar A.New concept for high voltagemodular multilevel converter[C]//IEEE Power Electronics Specialists Conference.Aachen,Germany,2004:1-5.
[6]王鹏伍,翔崔.MMC-HVDC三相解耦二次谐波环流抑制算法[J].电力系统自动化,2013,37(15):47-52.
[7]杨晓峰,郑琼林.基于MMC环流模型的通用环流抑制策略[J].中国电机工程学报,2012,32(18):59-65.
[8]屠卿瑞,徐政,管敏渊,等.模块化多电平换流器环流抑制控制器设计[J].电力系统自动化,2010,34(18):57-61,83.
[9]宋平岗,李云丰,王立娜,等.基于改进阶梯波调制的模块化多电平换流器环流抑制策略[J].电网技术,2013,37(4):1012-1018.
[10]杨晓峰.模块组合多电平变换器(MMC)研究[D].北京交通大学电力电子与电力传动,2012.
[11]卓谷颖,江道灼,连霄壤.模块化多电平换流器不平衡环流抑制研究[J].电力系统保护与控制,2012,40(24):118-124.
[12]屠卿瑞,政徐,管敏渊,等.模块化多电平换流器环流抑制控制器设计[J].电力系统自动化,2010,34(18):57-62.
