基于无棱镜全站仪的树冠体积算法
2014-01-04谢鸿宇赵耀龙杨木壮李长辉李展聪邓洁茹林小燕
谢鸿宇,赵耀龙 ,杨木壮,李长辉 ,李展聪,宋 爽,邓洁茹,杨 锦,林小燕
(1.广州大学 地理科学学院,广东 广州510006;2.华南师范大学 地理科学学院,广东 广州 510631;3.广州市城市规划勘测设计研究院,广东 广州510023)
基于无棱镜全站仪的树冠体积算法
谢鸿宇1,赵耀龙2,杨木壮1,李长辉3,李展聪1,宋 爽1,邓洁茹1,杨 锦1,林小燕1
(1.广州大学 地理科学学院,广东 广州510006;2.华南师范大学 地理科学学院,广东 广州 510631;3.广州市城市规划勘测设计研究院,广东 广州510023)
树冠体积是树木生物量计算中非常重要的参数。在此,介绍了一套基于无棱镜全站仪的树木树冠体积测量和计算方法。首先,在树木周围布设控制点,并用GPS测定控制点坐标。其次,根据树木的生长情况将树冠分层,每层根据树冠伸展情况和凹凸变化选择特征点施测。再次,将所测各层的特征点,在各自层内两两相连,构成弧段面。然后,由下至上,相邻弧段分别进行内插点操作,以保证上下两弧段的点数目相同,将上下弧段的点一一对应相连,以构成多面体,进而建立树冠模型,利用积分算法计算树冠的体积。最后,选取了7棵不同冠形的样本树,比较了传统方法、无棱镜全站仪、三维激光扫描仪所测树冠体积。结果表明,全站仪所测体积的精度大大高于传统方法;与三维激光扫描仪相比,大体上有10%~20%的误差。考虑到,无棱镜全站仪野外工作环境要求和造价都远低于三维激光扫描仪,因此,本文的方法具有较强的实践意义和应用价值。
无棱镜全站仪;树冠体积;树木测量
树冠表面积等因子的引入,可以提高各分量生物量模型的拟合精度和预估精度,为建立更加精确的生物量模型奠定了基础[1]。另外,在树叶密度的计算、冠积指数等方面,提高树冠体积测值的精度也具有研究意义[2]。
为了获取活立木的树冠体积和表面积,本研究将介绍一种利用无棱镜全站仪在城市绿地对活立木进行测量,通过建立单木的树冠数字表面模型进而求算树冠体积和树冠表面积的新方法,以下将一一阐述。
1 研究现状
目前,树冠体积的计算方法可以分为两大类:一类是测树学方法;另一类是将测量仪器引入树木测量中,利用测量相关计算方法求算体积。主要研究如下:
(1)测树学方法
这一类方法所使用工具多为用皮尺、测高仪等。一般在树冠下,先在2个方向拉皮尺测定直径,然后用圆形或椭圆形拟合树冠底面积;然后将树冠分层,用圆台或椭圆台拟合求取体积等;部分研究中,还采用将树冠视为圆柱体、台体或锥体以计算体积。如陈自新等[3]通过建立城市主要绿化树种叶面积回归方程对北京城市绿地三维绿量进行的系列研究、周坚华等[4]利用航片通过计算机模拟获得的上海市总三维绿量、刘常富等[5]采用立体量推算立体量测算森林绿量、周一凡等[6]在以平面量模拟立体量进行绿量快速测算等研究,都是采用这类方法。
(2)测量学方法
这一类方法,将全站仪、三维激光扫描仪等测量仪器引入树木测量中。通过获取树木的树冠模型来求取树冠体积。主要研究有罗旭[7]利用三维激光扫描系统所获得的点云数据,然后利用图像处理的方法抽取树木轮廓,再沿竖直方向由树顶至树冠底部按高度h分割成1个圆锥和n个圆台,按照等距计算不规则面的面积,从而得到1个圆锥和n个圆台的体积总和,进而得到单株乔木的三维绿量;吴春峰等[8]利用点云数据测量树木树高和胸径拟合材积;石银涛等[9]利用树木点云数据构建树木主干三维模型,对冠幅直径、树高、胸径进行了测算;范海英等[10]从点云数据中提取6个纵剖面,再用横截面积截取立体树冠计算表面积和体积。
如前所述,目前的树冠体积求算方法存在如下问题:
1)使用圆柱体、台体、锥体等规则几何体难以反映树冠的真实形状,以这些几何体拟合树冠模型,进而求算体积,会导致计算结果误差很大。
2)树冠表面点所构建的模型是树冠体积的计算方法的基础。但是,树木是非封闭、可穿透的物体,现有方法难以从三维激光扫描仪的点云数据中提取出表面点数据。因此,点云数据虽然精度高、数据量大,仍然难以拟合出准确的树冠模型。
因此,引入新的技术和算法,以提高树冠模型的精度,是当前树冠体积算法研究中的一个重要问题。
2 研究方法
无棱镜全站仪是采用3R级可见工业激光直接照准目标,利用目标物的漫反射返回信号进行精确测量,实现了“所瞄即所测”。因此,只要照准树木表面即可获取树木表面特征点的三维坐标。本次实验的测量样本均位于广州大学大学城校区内。经调查后,在校园内选择主要树种计39种,共133棵树进行测量。
2.1 树冠表面特征点的获取
树木在自身生长规律、阳光、养分、人工修剪等因素影响下,树冠形状各异。经过实地调查,本次测量地39种树种,大致可以分为7种冠型(见表1),作业流程大致如下:
(1)控制点布设。综合考虑树木大小、地形、通视情况等因素,在被测树木周围布设2个以上控制点,用GPS-RTK或CORS测出控制点的坐标,控制点的精度应在厘米级。
(2)纵向分层。树冠的分层位置应选择在树冠垂直方向上的凹凸处的转折变化处。该分层位置既要反映树冠的形态,又要大致平行于平面。如果树木顶部呈锥形,则树冠顶点位置需选择在树冠最高处并靠近树冠平面中心。
(3)单层特征点选择。在确定分层后,每层内特征点位置需根据该层树冠的伸展情况和弯曲的趋势进行选取。一般取外凸和内凹相交处,即形态变化的转折点。每层弧段面的高程值为该层全部特征点的高程的平均值,为确保精度,同一层特征点的高程差不能超过正负20 cm。
7种冠型树木的纵向分层、每层特征点的分布如表1所示。
2.2 特征点拟合弧段面
在获取树冠分层特征点坐标后,同层的特征点按测量顺序两两生成弧段,闭合后形成弧段面。内业处理程序流程如下:
(1)判断线段的凹凸性。通过判断特征点所形成的内角是否大于180度来确定内凹还是外凸。如图1所示,特征点123的测量方向为逆时针,所组成内角∠123小于180度,故线段2~3向外凸。
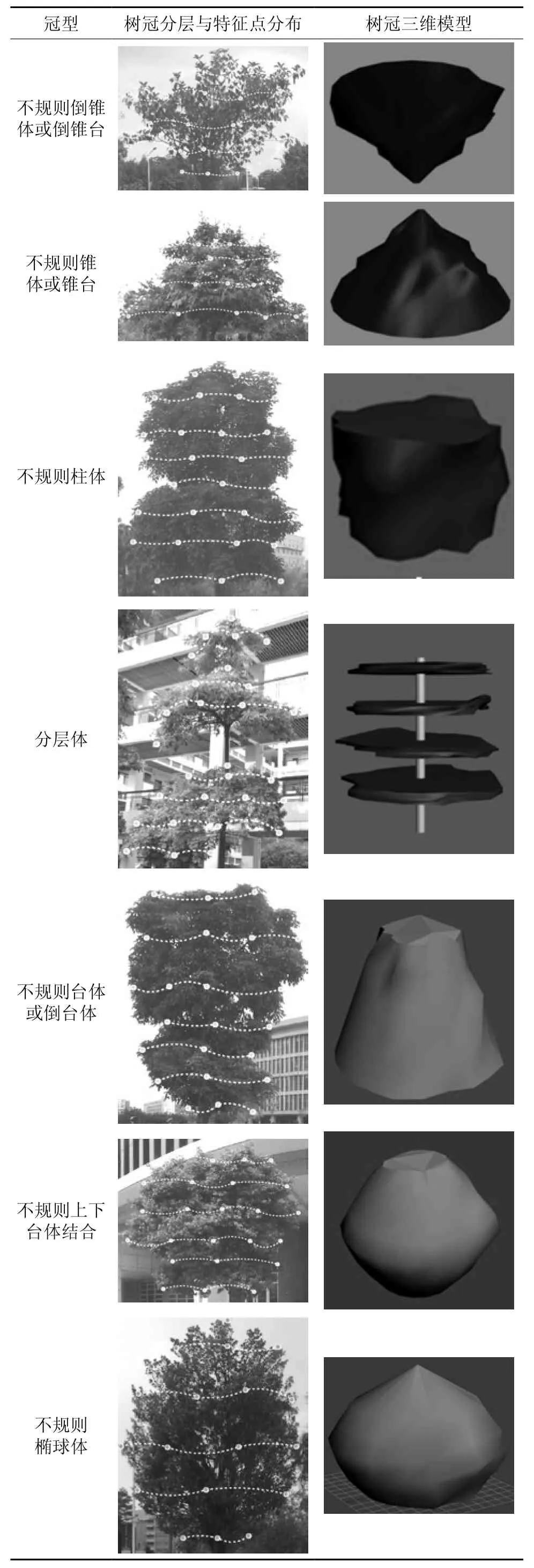
表1 树冠分层与特征点的分布Table l Distribution of feature points in every tree crown layers

图1 生成弧段Fig. 1 Created segmental arcs
(2)根据弦高将直线段转化为弧段,闭合生成弧段面。弦高的确定是根据每年太阳直射时,实地量测树冠阴影而统计得到的弦长与弦高之比。
(3)确定弧段面高程。以同层所有特征点的平均高程值为该弧段面的高程。
2.3 树冠外表面的分层构面
弧段面生成后,由下至上,将相邻两个弧段上的点相连构成树冠的外表面。由于每层特征点的数目有限,如果仅以相邻两弧段的特征点相互连接生成树冠外表面,势必会影响树冠模型的精度。因此,需要对相邻的两弧段进行加密内插操作,程序流程如下:
(1)加密内插。由下至上每次抽取2个相邻弧段,先以两弧段中长度较长弧段作为基准,以1 cm为内插间隔,确定需要内插出来的点的数目,再以点的数目确定较短弧段的内插间隔,保证相邻两弧段具有相同数目的点。
(2)确定相邻弧段加密点的连接次序。相邻弧段加密后,为保证加密点之间连接不发生混乱,需要确定加密点的连接次序。首先,对相邻两弧段进行空间相交操作,确定两弧段的公共点(由测量实践可知,绝大部分情况下上下两层至少有2个公共点,若不存在公共点,就以两弧段最近点作为起始点)。然后,选定其中一个公共点为起始点,按顺时针顺序将2个公共点间加密点一一对应相连,生成该层的外表面(如图2所示)。
(3)锥形树冠顶部处理。部分树木的顶部呈锥形,最顶部一层只有1个点。构面时,只需将顶点下面一层以1 cm间隔进行加密内插。然后,将顶点与所有加密点相连即可完成构面。
由下至上重复上述步骤,完成全部分层的外表面后,叠加后即生成树冠模型。

图2 弧段加密内插Fig. 2 Encrypted interpolation in segmental arcs
3 树冠体积计算
在生成树冠的模型后,即可用于求算树冠的体积。与构面的流程类似,树冠体积的计算采取由下至上分层计算的办法,每一层又分为重叠部分和非重叠部分进行求算。
3.1 重叠部分体积求算
重叠部分是指相邻2个弧段面进行空间相交操作后所生成的公共部分,该部分的算法相对简单,公式如下:

式中:V为重叠部分体积,m3;S为重叠部分多边形的面积,m2;H为上下两层弧段面的高程差,m。
3.2 非重叠部分体积求算
非重叠部分都是一些非规则三面体,由内、外表面和上表面或下表面构成。本文中采用积分法求算其体积(如图3所示)。程序流程(以外表面、内表面和顶面三面体为例)如下:

图3 树冠模型Fig. 3 Digital surface model of tree crown
(1)以顶面的envelope为基础,从envelope左下角开始,以1 cm为间隔,分别从X轴和Y轴进行内插,生成点阵。
(2)以点阵为基础,每个点做一条向Z轴方向延伸的射线。该射线与外表面、顶面作空间相交操作,获取2个相交点。以2个相交点的高程差为高,即可得到一个底面积为1 cm2的柱体。所有柱体累加即可得到该三面体的体积。
(3)锥形树冠顶部的体积的计算与非重叠部分的计算方法类似。
由下至上重复上述步骤,即可得到全部分层的体积,叠加后即为树冠的三维绿量(见图4)。
4 结果分析
为了验证体积计算精度,在测区内,选取几种优势树种,为阴香、大花紫薇、糖胶树、高山榕、细叶榕等一共7株样本树,在同一时间,同时利用无棱镜全站仪、三维激光扫描仪和传统方法求算体积并进行比较。三者拟合的树冠模型形状见表2。

表2 树冠模型比较Table 2 Comparison among tree crown models
由表2可知,传统方法中用规则几何体反映树冠形态是非常粗糙的,而基于无棱镜全站仪所测数据构建树冠模型能大体反映出树冠的形状,而三维激光建模则比较精细地反映出树冠的形状。因此,三维激光扫描仪所建模型最接近树冠的实际状态,相应地基于这一模型所求算的体积也最精确。在此,将基于3种模型求算树冠体积进行比较,结果见表3。

表3 3种模型求得体积对比Table 3 Vegetation quantity comparison of two kinds of tree crown models
由表3可知,全站仪所测体积的精度高于传统方法。与三维激光扫描仪相比,大体上有10%~20%的误差。
与三维激光扫描仪相比,无棱镜全站仪的外业作业条件更为宽松,三类方法的外业作业条件比较见表4。表4中作业时间、无棱镜全站仪和三维激光扫描仪指从设站到全部观测完毕时间。

表4 3种方法的外业作业条件对比Table 4 Comparison of three field surveying method’s working conditions
由表4可知,传统方法对外业观测条件要求最小,全站仪能满足大部分环境下测量要求,三维激光扫描仪对作业条件要求最高。 其中,由于树木遮蔽和树木高度造成的观测困难上,全站仪观测距离长,观测范围选择较大,可在很大程度上克服树木遮蔽和树木高度的影响;而三维激光扫描仪对有遮蔽的和高度较高的树木的扫描时,将难以 获取树木的全貌。
5 结 论
综上所述,将无棱镜全站仪用于树冠建模,进而求算树冠体积是一种可行的、具有较高精度的方法,结论如下:
(1)利用无棱镜全站仪获取的树冠表面数据,数据量小,数据后处理简单。如1株11 m高的树,分9层施测,每层7~15个点,只需100~150个点就能构建精确的树冠模型。加之,无棱镜全站仪操作简单,实现了“所见即所测”,对野外施测环境要求低,本次实验中所用仪器为南方342R全站仪,测量距离在100 m以上,完全可以满足树冠模型的数据采集需要。
(2)计算精度高。基于树冠模型计算的体积,较之传统方法所得结果,在精度上有很大提升,提升幅度在3%~45%,与三维激光扫描仪相比,精度误差在10%~20%之间。
(3)利用无棱镜全站仪进行树木体积测定,外业作业条件限制小,设站方便,且价格只有三维激光扫描仪的5%~10%,节省了人力和财力。
在此次研究中,由于实验样本限制,无法获取更多的样本以建立各个树种的树冠体积与冠幅和树高的回归模型,需要在今后的研究中进一步深入探讨。
[1] 廖彩霞,李凤日.樟子松人工林树冠表面积及体积预估模型的研究[J]. 植物研究,2007,27(4):478-483.
[2] 陈东来,刘丽华,张景兰.林分密度的新指标——冠积指数[J].东北林业大学学报,2003,31(5):15-17.
[3] 陈自新,苏雪痕,刘少宗,等.北京城市园林绿化生态效益的研究(6)[J]. 中国园林,1998,14(6):53-56.
[4] 周坚华,孙天纵.三维绿色生物量的遥感模式研究与绿化环境效益估算[J]. 环境遥感, 1995,10(3):162-174.
[5] 刘常富,何兴元,陈 玮,等.沈阳城市森林绿量测算[J]. 应用生态学报, 2007,18(6):1208-1212.
[6] 周一凡,周坚华.基于绿化三维量的城市生态环境评价系统[J]. 中国园林, 2001,17(5):77-79.
[7] 罗 旭.基于三维激光扫描测绘系统的森林计测学研究[D].北京:北京林业大学, 2006.
[8] 吴春峰,陆怀民,郭秀荣,等.利用三维激光扫描系统测量立木材积的方法[J]. 森林工程, 2009,25(3):71-72,76.
[9] 石银涛,程效军,贾东峰.三维激光扫描树木模型在林业中的应用[J]. 测绘通报, 2012,58(3):40-42,52.
[10] 范海英,李 畅,赵 军.三维激光扫描系统在精准林业测量中的应用[J]. 测绘通报, 2010,56(2):29-31.
Tree crown volume algorithm based on non-prism total station
XIE Hong-yu1, ZHAO Yao-long2,YANG Mu-zhuang1, LI Chang-hui3, LI Zhan-cong1, SONG Shuang1, DENG Jie-ru1, YANG jin1,LIN Xiao-yan1
(1. School of Geography, Guangzhou University, Guangzhou 510006, Guangdong, China; 2. School of Geography, South China Normal University, Guangzhou 510631, Guangdong, China; 3.Guangzhou Urban Planning & Design Survey Research Institute,Guangzhou 510023, Guangdong, China)
Volume of tree crown is a very important parameter in tree biomass calculation. An new kind of measurement and calculation method for tree crown on basis of non-prism total station was introduced. Firstly, two or three control points around the trees were laid and the points’ coordinates were surveyed by GPS-RTK or CORS. Secondly, the tree crown was divided into several layers in vertical direction according to the changes of crown shape. In every layer, the feature points were measured. They were located in maximum extend point, concave point and convex point of tree crown in every direction. Thirdly, in all layers, the polygons were created by linked feature points according to survey sequence, the arcs of every polygon were interpolated to create enough vertexes. Fourthly, from bottom to top of tree crown, the vertexes of neighboring arc were linked one-to-one correspondingly. And then, 3D model of tree crown was created by above method. Fifthly, the volume of tree crown includes two parts. One is overlap Part. This volume was obtained by area of neighboring polygon public part multiply the height deviation of two polygons. Another was non-overlap part. This volume was obtained by integral algorithm. Finally, the volume of tree crown was compared between traditional method, non-prism total station and terrestrial Lidar. This comparison includes 7 sample trees. Their crown shape belongs to 7 different types. The comparison results show that the precision of non-prism total station’s calculation results was signif i cantly higher than traditional method and have 10%~20%error compared with terrestrial Lidar. But non-prism total station had much cheaper price and more available in all kinds of filed environment than terrestrial Lidar. Therefore, this method has strong practice signif i cance and application value.
non-prism total station;volume of tree crown;tree measurement
S776.02
A
1673-923X(2014)01-0012-06
2013-04-20
国家自然科学基金资助项目(41101152);广东省高等学校人才引进专项基金项目;教育部留学回国人员科研启动基金资助项目;广东省大学生创新实验项目(1107812048);国家级创新训练项目(201211078053);国家级创新训练项目(201211078055)
谢鸿宇(1973-),男,广东江门人,高级工程师,博士,研究方向为数字摄影测量和GIS;E-mail:bubblefatcat@163.com
赵耀龙(1974-),男,河南沈丘人,教授,博士,研究方向为测绘与地理信息科学;E-mail:yaolong@scnu.edu.cn
[本文编校:谢荣秀]
