恶劣海况下维持操纵性的最小推进功率临时导则浅析
2014-01-04沈文娜
沈文娜
(上海臻元船舶科技有限公司 上海200052)
引 言
2011年7月11日~15日,国际海事组织(IMO)在英国伦敦总部召开了海上环境保护委员会MEPC第62届会议,并以MEPC.203(62)决议的形式通过了包括EEDI在内的国际防止船舶污染海洋公约(MARPOL)附则VI有关船舶能效规则的修正法案,即增加第四章关于新船能效设计指数(Energy Efficiency Design Index,简称EEDI)和船舶能效管理计划(SEEMP)要求,于2013年1月1日正式生效。该修正案第21.5条还要求船舶的装机功率应不小于IMO制定指南中所定义的恶劣海况下维持船舶操纵性所需要的最小推进功率,但是除了MSC.136(76)制定平静海况的操纵性标准外,对于恶劣海况的定义及对船舶操纵性的要求国际上并未有明确规定。为此,IMO建议制定恶劣海况下维持船舶操纵性的最小推进功率临时导则,以保证船舶在恶劣海况和天气下能够安全航行。2013年5月13日至17日在英国伦敦召开的国际海事组织海上环境保护委员会第65届会议(MEPC65)审议和修正了以MSC-MEPC.2/Circ.11散发的“2012年恶劣海况下维持船舶操纵性的最小推进功率临时导则”,形成“2013恶劣海况下维持船舶操纵性的最小推进功率临时导则”(简称“最小功率导则”),并以MEPC.232(65)决议的形式发布。该导则制定目的是为了协助主管机关和被认可的组织在验证船舶是否满足能效设计指数规定的EEDI值要求时,验证其装机功率是否满足恶劣海况下维持操纵性的要求。
1 最小功率导则简述
1.1 适用范围
(1)该临时导则仅适用于满足EEDI第0阶段的船舶;
(2)该临时导则仅适用于载重量为20 000 t以上的散货船、油船和兼装船3种船型;
(3)该导则适用于传统推进方式的船舶,不适用于非常规推进系统推进的船舶;
(4)该临时导则适用于无限航区航行的船舶;否则主管机关将考虑航行区域内的限制条件。
1.2 恶劣海况定义
恶劣海况定义参见表1。

表1 恶劣海况对应不同船长的参数表
对于沿海水域,应考虑谱峰参数为3.3的JONSWAP波浪谱。
1.3 评估方法
该临时导则给出两种评估方法,可从两个不同的等级进行:
(1)最小功率曲线评估;
(2)简化评估。
船舶的装机功率只要能满足两个等级评估中的任何一个等级评估所要求的最小功率都可以认为该船满足在恶劣海况下维持操纵性要求的最小功率。
2 最小推进功率评估方法
2.1 最小功率曲线评估法

式中:a,b为船型系数;DWT为指船舶的载重量,t。
由图1可见,最小功率曲线随着载重量线性变化。在相同载重量时,散货船对最小功率的要求比油船小。

表2 不同船型a和b 参数表

图1 最小功率曲线
最小功率曲线评估法是一种比较简单的评估方法,如果船舶的最大持续功率MCR或指定最大持续功率SMCR大于计算得到的最小功率,可认为该船满足船舶维持操纵性要求的最小功率的要求,也就不需要用简化评估法再去评估。如果船舶的MCR或SMCR小于计算求得的最小功率,则需用简化评估法进一步评估。
2.2 简化评估
简化评估流程的原则:具有足够装机功率的船舶,在逆风迎浪中以一定的前进航速行驶时,应能在任意方向的风压下保持航向。本流程中的简化仅考虑船舶沿船长方向做定常运动;通过调节船舶在逆风迎浪中可达到所需的前进航速,评估其在风浪中保持航向的最小主机功率。
简化评估流程分为以下两步:
(1)确定船舶在逆风迎浪时保证航向稳定性的最小航速。
(2)根据最小航速计算出所需的最小主机功率,并与装机功率进行比较。如计算求得的最小功率小于主机功率,则装机功率满足要求;反之则不满足。
2.2.1 恶劣海况下最小航速Vs的确定
船舶航行时的航速分为最小航行速度Vnav和最小保持航向速度Vck。
恶劣海况下最小航速Vs是指船舶在逆风迎浪的情况下能够保证航向稳定性的最小航速,即
(1)最小航行速度Vnav
维持船舶前进最小航行速度Vnav保证船舶在风暴来临之前有足够的时间离开沿海区域,以降低航行风险和船舶在不利航向波浪作用下过度运动的风险。设定Vnav= 4.0 kn。
(2)最小保持航向速度Vck
维持航向稳定性的最小速度Vck保证船舶在任意方向的风压作用时都可以维持稳定的航向。

式中:Vck,ref为维持航向参考速度,单位kn。对于散货船、油船和兼用船,Vck,ref值取决于船舶正投影受风面积AFW和侧投影受风面积ALW的比值。

AR%为舵的实际面积AR与经船宽修正后船舶侧向浸没面积ALS,cor的比值。

式中:AR为舵的实际面积,对于高升力舵,其舵面积应是等效于常规舵面积的面积;ALS,cor为经船宽修正后的船舶侧向浸没面积。

式中:LPP为船舶的垂线间长,m;
Tm为船中吃水,m;
Bwl为船宽,m。
2.2.2 装机功率评估
装机功率应能够保证船舶在最大吃水时维持上述第2.2.1节计算求得最小航速为Vs航行时所需的最小推进功率。最小推进功率计算流程如图2所示。

图2 所需最小推进功率计算流程
如果实船最大装机功率大于计算得到的所需最小推进功率,则实船装机功率满足要求;反之则需调整主机功率以满足最小推进功率的要求。
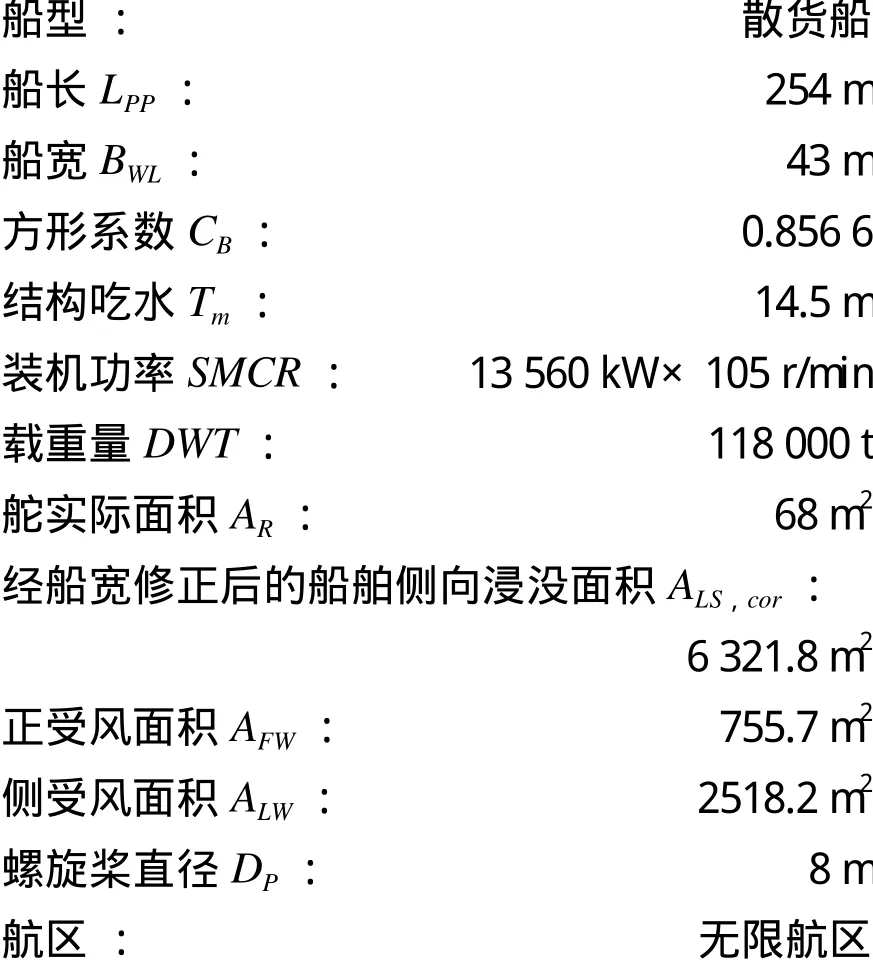
3 以118 000载重吨散货船为例分析最小功率评估过程
3.1 船舶参数
3.2 恶劣海况参数的选取
垂线间长LPP= 254 m>250 m,据恶劣海况的定义,其参数见表3。

表3 恶劣海况参数表
3.3 最小功率曲线评估法要求的最小装机功率
最小功率曲线值

由于11 031 kW<13 560 kW,所以装机功率可以满足船舶在恶劣海况下安全航行的要求。根据最小推进功率临时导则,则无需再用简化评估的方法进行评估。
3.4 简化评估
3.4.1 最小航速Vs的确定

式中:Vnav= 4.0 kn

根据式(3),插值计算求得Vck,ref= 5.67 kn
故Vs= 4.0 kn
3.4.2 装机功率评估
(1)螺旋桨克服船舶总阻力所需推力T的计算
根据MEPC .232(65)计算导则,船舶在恶劣海况下维持操纵性需要克服总阻力包括静水阻力Rcw、附体阻力Rapp、空气阻力Rair和波浪增阻Raw。

① 静水阻力Rcw的计算
对于散货船、油船和兼用船,静水阻力可不考虑波浪阻力的影响

式中:ρ为水的密度,1 025.9 kg/m3;
S为裸船体湿表面积,对本船,S=16 262 m2;
Vs为最小航速,对本船,Vs= 4.0 kn = 4.0×0.514 4 = 2.06 m/s。
k为形状系数,该值应从船模试验获得,如果无法从船模试验获得,也可根据经验公式计算求得,参见式(10)。

对于本船,k= 0.270 0。CF为摩擦阻力系数,

式中:υ为水的粘性系数,取υ=1.188 2×10-6m2/s,所以本船的静水阻力,代入数据计算得Rcw= 45 025.7 N。
② 附体阻力Rapp的计算
关于附体阻力Rapp如何计算,MEPC.232(65)决议中并未给定明确方法。本文用Holtrop-Mennen阻力回归计算中附体阻力的计算方法进行计算,即

式中:SAPP为附体的湿表面积, m2;CF见式(11);1+k2为附体的形状因子。
对于本船,主要考虑舵和舭龙骨引起的附体阻力,对应的形状因子和湿表面积参见表4。

表4 附体阻力参数表

本船附体阻力:Rapp= 3.2 N。
从数值上可见附体阻力对总阻力的影响很小,可以忽略不计。
③ 空气阻力Rair的计算

式中:Cair为空气阻力系数,该系数可根据船模试验或者经验数据获得;对本船,根据船模试验,Cair= 0.85。
ρa为空气密度,kg/m3; 可根据船模试验取值,对本船,ρa=1.225 5 kg/m3。
AF为船体和上建正受风面积,m2,对本船,AF= 755.7 m2。
Vw,rel为船舶相对风速,m/s,指根据MEPC.232(65)导则1.1中要求的风速Vw与船舶恶劣海况下最小航速Vs的和;对本船,Vw,rel=Vw+Vs=19.0+4.0×0.514 4 = 21.06 m/s。
所以本船的空气阻力Rair=174 569.5 N。
④ 波浪增阻Raw的计算

式中:Raw(Vs,ω)/ξa2为波浪增阻二阶传递函数,与前进航速Vs(m/s)、波浪频率ω(rad/s)、波幅ξa(m)和波谱Sξξ(m2s)有关。波浪增阻可以按照ITTC 7.5-02 07-02.1和7.5-02 07-02.2推荐的耐波性试验程序试验得到,或者使用主管机关认可的理论方法进行计算得到。
根据笔者在计算过程中发现,应用式(15)求解Raw在实船设计中并不可行。作为变通,笔者采用ITTC-7.5-04-01-01.附录D.3的简化公式进行计算:

B为型宽,对本船,B= 43 m;
LBWL为计算水线95%型宽处至船首的距离,如图3所示。

图3 LBWL计算示意图
对本船,LBWL= 34.5 m,所以本船极限增阻Raw= 913424.3 N。
⑤ 推力减额分子t的计算
推力减额因子t可从船模试验或经验公式得到。默认的保守估算是
式中:w为指伴流分数,伴流分数w也可从船模试验获得,也可根据表5计算求得。
对本船,从船模试验获取w值,w= 0.387。
⑥ 螺旋桨克服总阻力所需推力T的计算


表5 伴流分数w的建议值
(2)所需最小装机功率的计算
所需最小装机功率的计算过程如图4所示。

图4 所需最小装机功率的计算
① 螺旋桨特性曲线
根据螺旋桨设计桨敞水性能试验,本船螺旋桨特性曲线如图5所示:

图5 螺旋桨特性曲线
② 螺旋桨进速系数J的确定(图6)

图6 螺旋桨进速系数J的确定
③ 螺旋桨所需转速n(r/s)的确定

④ 螺旋桨转速为n时所需的推进功率PD,见图7所示。
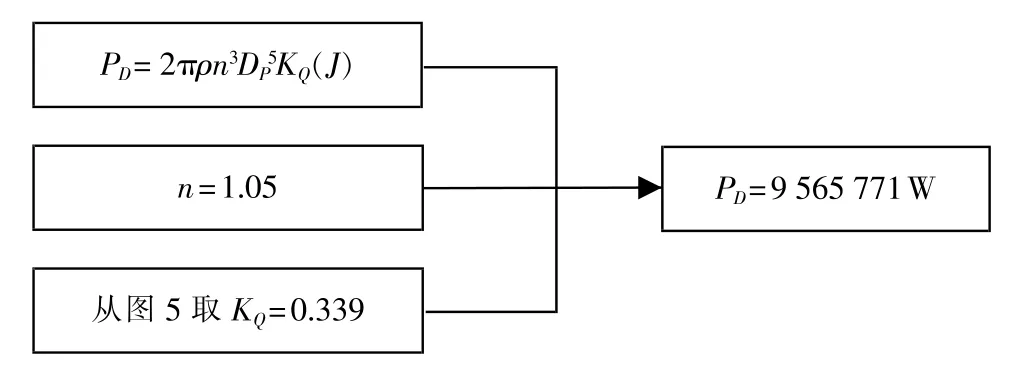
图7 推进功率PD的确定
⑤ 所需主机最小功率MCRmin
对本船,轴系效率为98%,则

3.4.3 探讨和归纳
对上述简化评估提出探讨并归纳如下:
(1)维持航向稳定性最小航速VCK的计算方法
笔者认为VCK计算公式引用的参数AR%计算公式表达有误。根据AR%的定义,AR%应指舵实际面积AR与经船宽修正船舶侧向浸没面积ALS,cor比值的百分数,即而非从实例计算结果来看,如果应用计算,则得到AR%=0.011,代入式(2)得到VCK=14.56 kn。很显然这个计算结果是不合理的,但这一点需由主管机关确认。
(2)附体阻力Rapp计算方法未明确规定
MEPC.232(65)决议并未明确给出附体阻力的计算方法。中国船级社在CCS通函“中国船级社(2014年)通函第6号总第490号”中规定附体阻力需通过水池试验获得。但是,笔者认为通过水池试验获得附体阻力的方法并不可行,因为这意味着需要至少在结构吃水时增加裸船船模试验,从而增加船模试验成本。本文采纳德国汉堡水池的建议,应用Holtrop-Mennen阻力回归的方法进行理论计算。从计算结果来看,附体阻力对于总阻力的影响很小,可以忽略不计。
(3)波浪增阻Raw的计算方法求解繁琐
MEPC.232(65)决议中虽然给出波浪增阻的计算公式,积分计算公式表面看似并不复杂,但是求解过程却很繁琐复杂,不适用于实船设计;如果通过船模耐波性试验获得,又将大大增加船型研究的时间、成本和费用。
本文的计算仅限于笔者自己的理解,用于对本计算的探讨,准确性需与主管机关进一步确认。从计算结果看,通过简化评估方法计算求得的最小推进功率远小于最小功率曲线法计算求得值,这也是引进简化评估法的意义所在。
4 结 论
MEPC.232(65)决议的发布为MARPOL附则VI第21.5条要求的执行提供了规范依据,但是通过上文的表述,笔者认为现阶段简化评估方法在实船设计中的可行性较差,建议采用最小功率曲线值法进行评估。
[1] 2013 Interim Guidelines for Determining Minimum Propulsion Power to Maintain Manoeuverability of Ships in Adverse Conditions.Resolution MEPC.232 (65)[S].2013.
[2] ITTC- Recommended Procedures and Guidelines Speed and Power Trails, Part 2 Analysis of Speed/Power Trail Data[S].2012.
[3] 中国船舶工业总公司.船舶设计实用手册 总体分册[M].国际工业出版社,1998.
[4] 中国船级社.中国船级社(2014)通函第6号总第298号[S].2014.
