无轴传动中交叉耦合控制技术研究
2014-01-01陈桂
陈 桂
(南京工程学院自动化学院, 南京211167)
0 引言
大跨距的扫描架[1]、悬挂输送机及印刷等行业中,为了保证多轴传动精度往往采用有轴传动,随着传动技术、控制技术及机械技术的快速发展,采用直接驱动电机取代原有的齿轮和长轴杆传动系统,从根本上解决了由于轮齿精度、安装和齿轮侧隙、长轴杆变形等因素引起的累积误差、随机误差以及由于使用磨损引起的传动不平稳等问题,同时,由于取消了大部分齿轮和传动轴,减少了机械零部件,大大简化了整机系统的结构和制造成本,提高了设备的可靠性。因此,无轴传动在印染、造纸、纺织、近场扫描架和提升等设备上得到了广泛应用。
采用无轴代替有轴进行传动,核心问题是多台驱动电机的同步协调控制满足系统需求。近年来,国内外广泛开展了无轴传动控制伺服系统方面的研究,例如:文献[2]在常规滑模变结构算法的基础上,采用动态滑模变结构控制策略,解决输纸机各运动轴速度和相位的同步控制问题;文献[3]从同步控制算法入手,研究模型参考PID差速补偿器控制算法,通过对比单一闭环变频调速系统、多电机变频调速系统,得到多电机PID差速补偿变频调速系统,系统将自动跟踪补偿由扰动造成的速度偏差的变化,从而差速补偿器自动校正其差速的变化值,以致使差速值趋近于零;文献[4]从提高单轴控制精度来达到提高双电机同步控制精度的要求。本文研究在无轴传动控制中引入交叉耦合控制技术,用于提高无轴传动同步控制精度。
1 试验平台简介
大跨距的扫描架、印刷等无轴传动系统,本质属于多电机无轴传动控制技术。本文以一维大跨度试验平台为控制对象,研究无轴传动同步控制技术。试验平台主要由平台、齿条、齿轮、电机减速机以及支架组成,平台跨度约5 m,支架用于安装试验设备使用,两端分别与两边齿轮轴上,两边的传动采用齿轮齿条方式。组成示意图如图1所示。
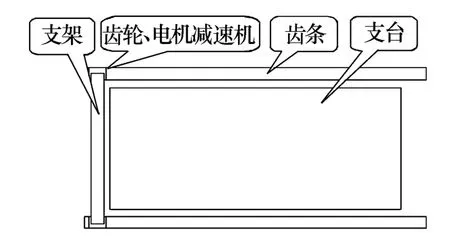
图1 平台组成示意图
这种双电机同步控制,由于跨度较大,可近似认为是一种柔性同步控制系统,控制原理如图2所示。其中,AWR、ASR分别为位置回路控制器和速度回路控制器。图2中的虚拟主轴是在控制计算机产生的运动轨迹(位置轨迹),两台电机随动虚拟主轴转动,实现模拟长轴传动的方式。图2中的数字齿轮是当双边齿轮传动比不同时匹配两条传动链的速比,试验平台两端速比相同,因此数字齿轮的速比为1。
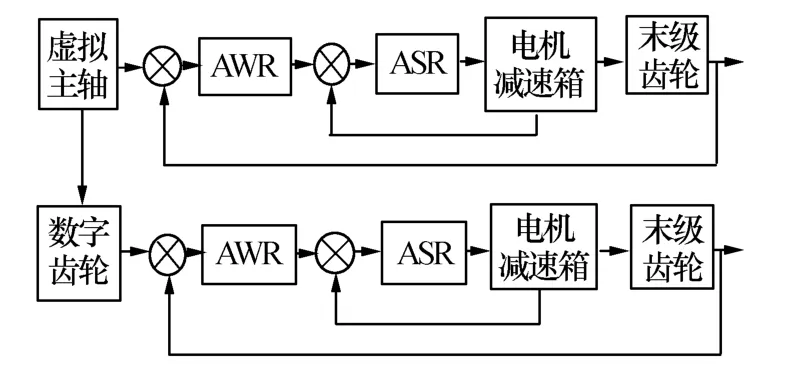
图2 无轴传动的控制原理
2 系统控制
2.1 控制系统组成
图3为试验平台运动控制系统的拓扑结构示意图(试验平台两边驱动分别设其为X轴和Y轴双电机驱动)。运动控制基于嵌入式控制系统,利用嵌入式系统中的微处理器的运算能力完成同步控制系统的算法计算,同时,在嵌入式系统中扩展了大规模可编程逻辑器件FPGA,作为嵌入式系统中的第二个控制核使用,完成部分数据接口及数据前期处理,同时和微处理器相互监控运行检测,确保系统稳定运行[5]。驱动系统采用数字化、高性能的交流伺服驱动器;在两边的传动齿轮轴上各安装一个多圈绝对值编码器,进行丝杆的位置检测,并最终折算到平台两边的绝对位置,作为位置回路的反馈。为提高系统运行安全性,编码器和轴驱动各采用一路CAN总线作为数据采集和轴控制通讯通道,系统配置了触摸屏作为人机交互设备。
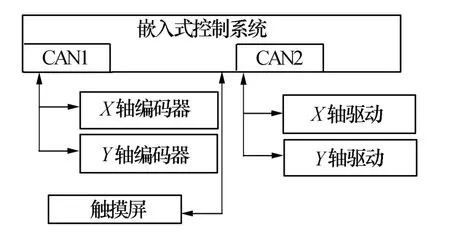
图3 控制系统拓扑结构示意图
2.2 同步控制
根据试验平台的工作需求,轴控制采用如图2所示的同步控制原理,两边轴驱动跟随虚拟主轴转动,实现平台的运动控制。控制运行主要有连续运行和定位控制两种模式,系统位置控制采用II型无差控制模式,因此,定位能够实现高精度控制。本文主要讨论连续运行的动态过程。
完全理想(驱动、负载等相同、无扰动)系统,依据图2控制原理,双边驱动可实现完全同步,但在实际双电机同步控制系统中并非理想状态,主要存在两种扰动:确定性扰动和随机扰动。确定性扰动如:传动比的微小差异、负载差异(由于扫描架应用中安装在支架上的扫描头沿X轴方向运动导致的负载不均)等;随机扰动主要有室外运行的阵风扰动、摩擦力矩不均等扰动。这些均会对双边驱动的同步性能产生影响,造成同步控制精度下降。以下就这些情况进行仿真。
(1)确定性扰动。图4为速比差异(假设两路转动系统的传动比相差0.1%)对同步性能的影响仿真图,由于系统采用无差II型控制器,对于速比差异等位置回路的前向通道对同步性能的影响主要在运动的起始阶段,平稳运行后影响逐渐消失,图5为负载不均对同步性能的影响仿真图(5%的斜坡扰动),同步差较大出现在负载不均较大时。

图4 传动比差异时同步性能

图5 负载差异时同步性能
(2)随机扰动。随机扰动分两种情况:一种是试验平台在室外运行过程中阵风等较大负载扰动;另一种情况是由于摩擦力矩不均等力矩扰动。图6为当阵风负载扰动为5%时,无轴传动同步性能仿真响应曲线,图7为随机扰动同步性能图。

图6 阵风扰动时同步性能
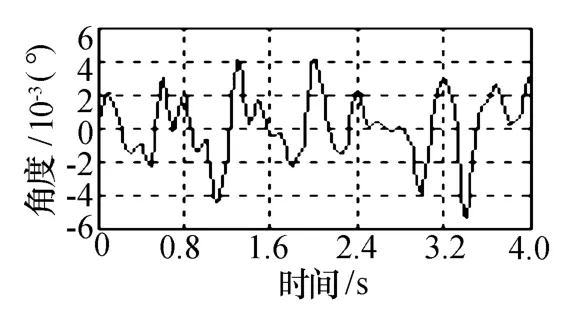
图7 随机扰动时同步性能
确定性扰动和随机扰动的存在,对试验平台的双边电机驱动同步性能均产生影响,为此,在无轴传动中引入交叉耦合控制技术以改善同步性能。
2.3 交叉耦合控制[6-8]
交叉耦合控制方法,通常应用于高精度数控机床多轴协调控制,用来进行轮廓误差补偿,提高机床轮廓控制精度。该方法包括误差模型的建立和补偿修正量的分配,其原理主要是在控制过程中,根据各轴位置误差信息按照一定的补偿原理对各轴控制进行修正。相比较单纯提高单轴位置控制精度,交叉耦合控制方法更容易调整,协调控制精度也更高,因此,此方法正广泛应用于数控领域。无轴传动同步控制方法将两个轴的控制器独立设计及控制,互不影响,由于轴与轴之间特性及扰动的存在,因此,同步精度往往不能满足要求。在无轴传动引入交叉耦合控制,以减小同步控制误差作为控制目的,提高同步性能。
交叉耦合控制方法在无轴传动中应用的原理框图如图8所示,两边轴的位置差分别经匹配增益c1、c2后求差作为Gc(s)(交叉耦合控制器)的控制输入,Gc(s)的输出经耦合增益g1、g2后即为两边轴的修正量。由于两边轴驱动方式和控制参数基本相同,c1、c2和g1、g2可取为常数1,为便于控制计算机处理,Gc(s)的控制输入直接选取两边轴的位置差,图9为简化后的原理框图。

图8 无轴传动交叉耦合控制原理

图9 简化后交叉耦合控制原理
2.4 系统传递函数的优化
图9中可以看出,交叉耦合应用在无轴传动控制中,实际上是通过对同步误差实时检测后对两轴运动速度进行补充,提高同步控制精度。依据梅逊公式将图9中速度补偿相加点前移,如图10所示,则交叉耦合控制器的传递函数为式(1),无轴传动的位置控制器采用PI(比例积分)控制,其传递函数如式(2),交叉耦合控制器同样采用PI控制,传递函数如式(3),令式(2)、式(3)中 τ1=τ2,将式(2)、式(3)带入式(1),得式(4),从而得到优化后的交叉耦合控制原理图,如图11所示。图11中的交叉耦合控制器的传递函数Gc1(s)即为式(4)。将交叉耦合控制补充相加点前移后,将交叉耦合控制器两个参数(比例增益K2和τ2)的整定转换为单参数(式(4)中的K)的整定,可以大大简化参数的整定过程。控制计算机只需对两台轴驱动的位置检测值求差,并乘以系数K,便完成交叉耦合控制的运算,更便于工程实现。

图10 前移后交叉耦合控制原理
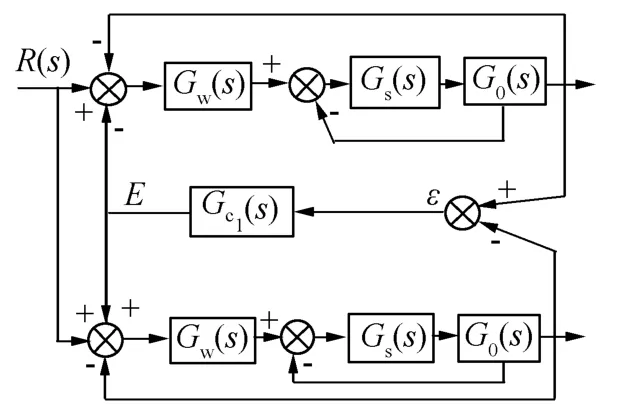
图11 优化后交叉耦合控制原理

2.5 控制器参数整定及仿真结果
依据图11控制原理,将交叉耦合控制技术引入同步控制,并对2.2节描述的四种情况进行相同约束条件的仿真,如图12~图15所示。
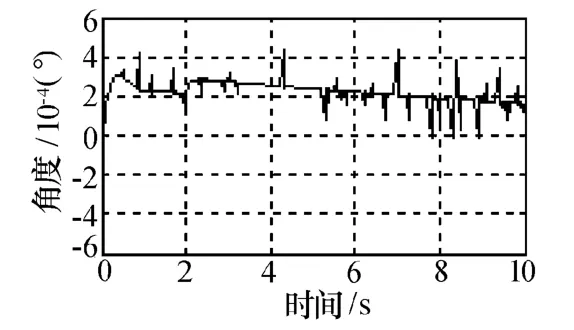
图12 传动差异同步性能

图13 负载差异时同步性能
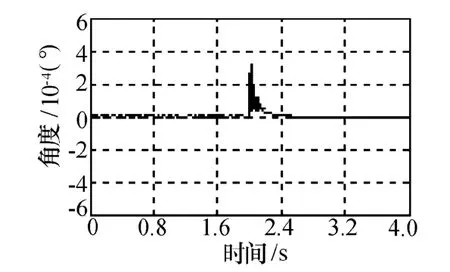
图14 阵风扰动时同步性能
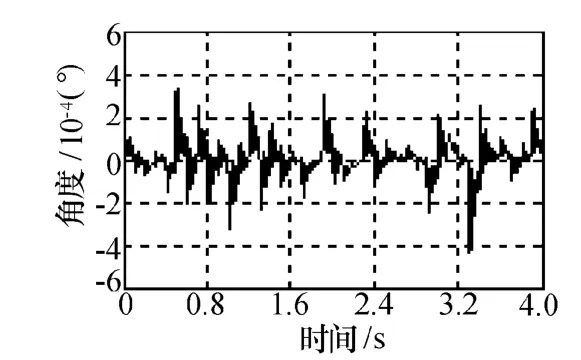
图15 随机扰劝时同步性能
将图4~图7与图12~图15四种情况的仿真结果进行比较,应用交叉耦合控制器后,同步控制精度均大幅提高,图16和图17分别为无交叉耦合控制和有交叉耦合控制的综合仿真结果,相同条件下,同步精度可提高10倍以上。仿真结果表明,将交叉耦合控制引入无轴传动控制中,系统的同步性能得到了有效的提高。

图16 无交叉耦合控制时同步性能

图17 交叉耦合控制时同步性能
3 结束语
试验平台采用无轴传动技术,实现两个物理轴的同步控制,简化了系统的结构,结合交叉耦合控制技术,使同步性能得到进一步的提高,应用梅逊公式对交叉控制控制器进行优化,方便了交叉耦合参数的整定,相对于提高单轴性能来改善无轴传动中同步性能,交叉耦合控制技术效果更好,且方法简单,更适合工程应用。
交叉耦合控制技术也可以应用到其他多轴传动的同步控制中,其同步性能和各单轴的传动性能相关,对于传动刚性较差的系统,交叉耦合控制会降低系统的稳定性能,因此,如何将交叉耦合控制技术应用到这种系统中是目前交叉耦合控制技术应用研究的方向之一。
[1] 刘 剑.大跨度的扫描架设计与加工工艺[J].机械工程师,2010(2):129-130.Liu Jian.Design and processing technology of large span gantry[J].Mechanical Engineer.2010(2):129-130.
[2] 管力明,林 剑.无轴单张纸输纸机的同步控制[J].控制理论与应用,2009,26(5):573-577.Guan Liming,Lin Jian.Synchronization control of sheet feeding machine of shaft-less drives[J].Control Theory&Applications,2009,26(5):573-577.
[3] 李梦达,刘小斌,马军弟,等.异步电机模型参考差速补偿无轴传动控制器[J].电力电子技术,2010,44(9):65-66.Li Mengda,Liu Xiaobin,Ma Jundi,et al.The shaftless driving controller based on model reference differential compensation for asynchronous motor[J].Power Electronics,2010,44(9):65-66.
[4] 邓广福,刘光达,孟 磊,等.激光照排机场扫描控制的研究与实现[J].电子器件,2007,30(1):267-269.Deng Guangfu,Liu Guangda,Meng Lei,et al.Research and implementation of column scanning control for laser typesetter[J].Chinese Journal of Electron Devices,2007,30(1):267-269.
[5] 陈 桂.开放式可重构伺服系统研究与设计[J].现代雷达,2011,33(11):66-69.Chen Gui.A study and design of the reconfigurable open servo systems[J].Modern Radar,2011,33(11):66-69.
[6] 赵国勇,赵玉刚.基于曲线插补的多轴联动交叉耦合控制方法[J].计算机集成制造系统,2011,17(9):1968-1972.Zhao Guoyong,Zhao Yugang.Multi-axis cross-coupled control approach based on curve interpolation[J].Computer Integrated Manufacturing Systems,2011,17(9):1968-1972.
[7] Zhong Q,Shi Y,Mo J,et al.A linear cross-coupled control system for high-speed machining[J].The International Journal of Advanced Manufacture Technology,2002,19(8):558-563.
[8] Byun J H,Choi M S.A method of synchronous control system for dual parallel motion stages[J].International Journal of Precision Engineering and Manufacturing,2012,13(6):883-889.
