水面高速无人艇自主控制系统研究分析
2014-01-01林剑峰马善伟
林剑峰,马善伟
(1. 海军驻上海电站辅机厂军事代表室,上海 201104;2. 上海船用柴油机研究所,上海 201108)
0 引 言
随着美军在阿富汗战场成功地使用捕食者无人机发射海尔法导弹攻击塔利班的实战应用,标志着无人控制系统已开始执行打击任务。水面高速无人艇具有体积小、高速、较好的隐身、智能、无人员伤亡等优点,在军事方面能够灵活作战、部署机动、使用方便、可跟随战斗舰船出航执行任务,并可以在危险区域或者不适宜派遣有人舰船的区域独立自主执行任务, 拓展了海上作战范围, 具有良好的费效比。因而越来越多地受到各国海军的重视。无人艇自主控制是完成各种作业任务的基础。我国作为海岸线广阔、维护海权任务众多的发展中国家,加强无人艇自主控制系统关键技术研究,对于保护海上权益具有重要意义。
1 水面高速无人艇自主控制系统内涵
水面高速无人艇自主控制系统是以完成任务为最终目标,通过环境感知手段,进行目标探测与识别,自主进行路径规划、自主避碰,自主驾控并采取合理控制策略完成各种任务和作业使命的系统,它的核心内涵是自主性,在接受新任务之前,根据当前态势,具有智能生物特征随时自主做出合理决策,而非单纯接受外部的遥控指令去完成任务的系统;它是不考虑人的承受性,采用模块化设计,通过网络化、集成化模式,实现无人艇自身环境感知、无人艇之间以及与平台之间的信息搜集、传输、处理和综合应用,自主融合做出合理决策,完成既定任务的无人艇核心控制系统。该系统是无人艇完成侦察、搜索测量、运输等各种任务的关键系统。通常由任务模块、环境感知模块、智能控制模块、通信模块、自主决策模块、推进与驾控模块等组成。
2 国内外研究现状及发展趋势
2.1 国内外研究现状
水面无人艇的发展可追溯到第二次世界大战,初始的目的是设计成鱼雷形状在沿海区域进行排雷或清障。在第二次海湾战争中,无人艇成功地完成任务,以美国为代表的西方国家已将其列为重要的发展方向,其他国家海军也高度关注该技术领域的进展和动态。
美国在发展无人艇上占领先地位,2001年美国海军正式提出建造濒海战斗舰概念,明确提出了水面高速无人艇。2003年美国又先后开发“幽灵卫士”、“水虎鱼”和“斯巴达”等无人艇,2007年,美国海军发布了“无人艇主计划”[1~3], 规划了未来无人艇发展相关的技术投资及进程。同时,以色列、德国、日本、法国及新加坡等国家也开展了关于海上无人作战平台的研制,由此可见,随着未来战争对发展无人作战平台的需求, 无人艇将成为各国海上无人作战系统的重要组成部分,并向着智能化、体系化、标准化的方向发展[4,5]。
无人艇在民用方面多用于气象探测、水文探测等功能相对简单的领域,2011-11-28美国Liquid Robotics公司打造的“波浪滑翔机”无人驾驶船横渡太平洋,在开阔水域航行约5.9533万km,收集并把数据发送给谷歌地球的“海洋展”,开创了无人艇在民用领域的新纪元。
我国无人艇技术的研究尚处于起步阶段,很多技术领域与美国等西方发达国家相比存在很大差距。根据已有的报道,主要有海军某通信修理厂、中国航空科工集团公司沈阳新光公司、哈尔滨工程大学曾从事这方面的研究。沈阳新光公司推出的XG-2概念无人艇能依靠卫星通信,承担海上反潜任务;无人驾驶海上探测船“天象一号”曾为北京奥运会的青岛奥帆赛提供气象保障服务。哈尔滨工程大学水下智能机器人实验室在智能水面无人艇的研发上做了一些前期工作,已经完成了“××号”无人艇的设计和实艇建造等工作,并且开展了相关技术研究和海上试验。
通过对国际上无人艇技术先进国家的研究进展进行分析和对比(见表1)。当今世界无人艇技术尽管取得了一些突破,但尚属探索阶段,其控制多局限于遥控层面,如美国的海上猫头鹰、幽灵卫士、X持续跟踪自主舰艇,以色列的保护者等,在自主控制层面,仅是航向控制、航线规划、自主避碰等,对于自主控制的核心内容如自主决策技术目前尚未纳入研究范畴。而要真正实现无人作战平台的基本功能,甚或实现多智能体协同作战,基于任务完成性的无人艇的自主决策能力是根本。2008年美国在机器人自主决策方面做了一些探索性工作,如特种武器观测侦察探测系统,但由于其自主决策软件故障导致机器人将枪口对准了人类指挥官,导致该批机器人士兵紧急退出阵地。究其原因是目前尚没有一套控制自动控制系统出错的有效措施。自主决策能力的提高依赖于人工智能技术的飞速进步和对无人平台应用需提前设定严格的设计和使用紧箍咒,否则将出现失控状况。
2.2 发展趋势
1) 重视提高无人艇控制系统的综合效能。通过人工智能、信息化等技术的组合应用,在无人艇上加装多种任务模块,如监视、数据采集为一体,使无人艇能够独立或配合完成各种任务,是未来的一个重要发展趋势;
2) 以任务为中心设计,重视任务完成性,无人艇自主控制系统向标准化、系列化发展。通过通用化、系列化、模块化的设计方法,在基本型上进行适应性改进并搭载相应的任务设备,来完成不同的任务,是快速、高效、低风险发展无人艇新型装备的重要方向;
3) 重视无人艇自主控制系统的网络化、集成化发展[5]。提高各类无人平台之间以及与有人平台之间的信息搜集、传输、处理和综合应用能力,实现现场态势迅速感知、资源共享以及各种平台之间的协同,满足未来的迫切需要。
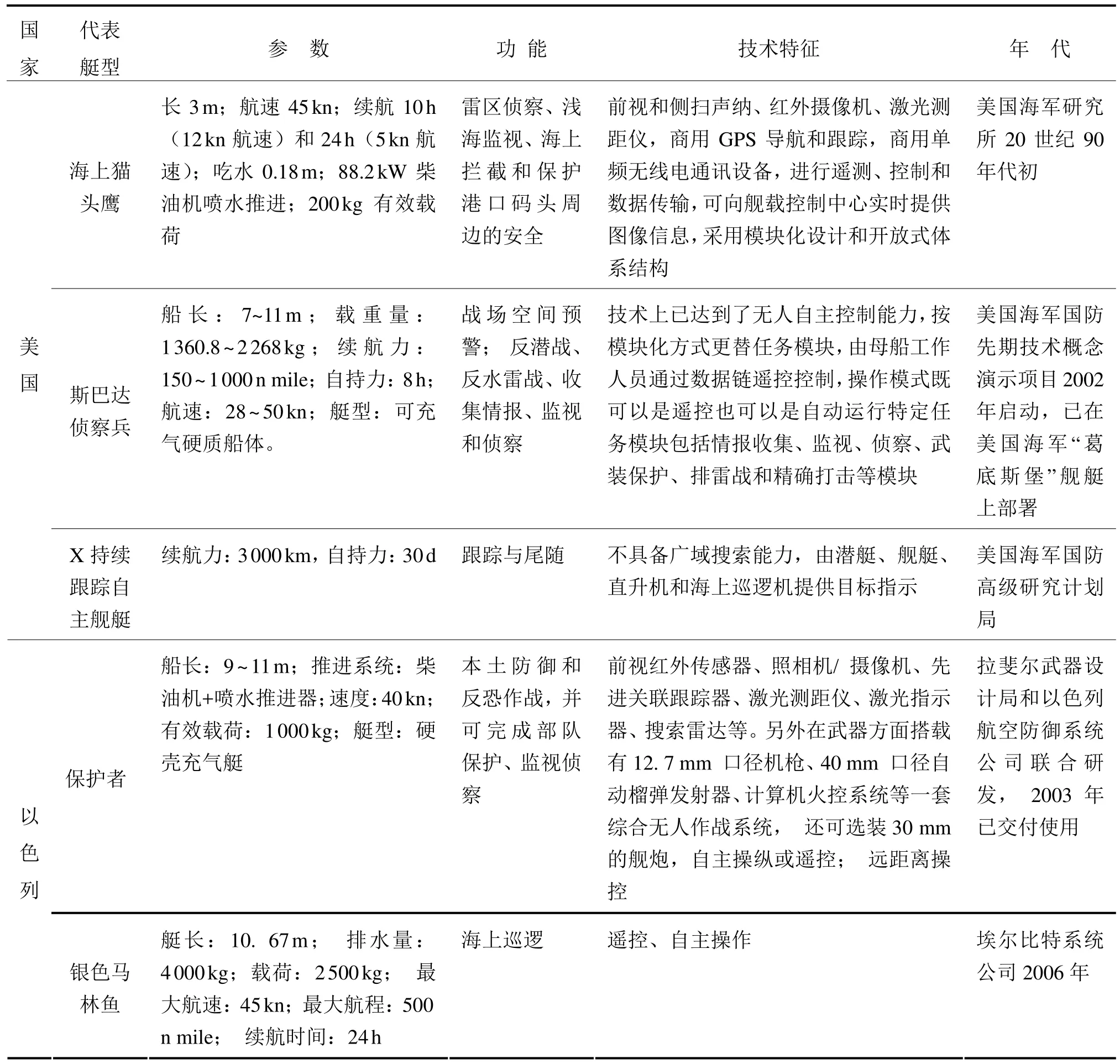
表1 国际上无人艇技术研究进展对比
3 研究热点与关键技术
3.1 研究热点
1) 基础理论。基础理论研究涉及水面高速无人艇自主控制系统设计体系、任务完成性、系统集成技术、模块化技术、系统容错控制技术、功能模拟验证技术以及数据链路技术等研究内容;
2) 环境感知。主要进行风、浪、流、温度、压力等研究,为无人艇路径规划和自主控制提供基础输入;恶劣海况下、艇体持续颠簸时水面目标探测及识别理论和技术研究;海洋环境障碍物识别新理论和新方法研究;动态背景和低信噪比条件下的目标检测方法研究;
3) 任务模块设计。研究重点集中在任务模块分解、优化配置及关联技术研究,如多传感器信息融合技术的研究以及目标跟踪理论研究,探索目标跟踪、轨迹预测、不同海况预测修正的基础理论和方法,进行动力定位、动态定位跟踪、跟踪策略设计等技术的研究;
4) 自主决策。自主控制策略研究(如避障、返回、等待等);态势判断与决策基础理论及方法;不同通信模式的权限管理技术,无人艇优先、通信控制优先等的确定策略;
5) 推进与驾控。复杂海洋环境下无人艇自主操纵稳性理论及方法;控制参数与控制策略优化技术,航迹控制理论;控制性能分析,并对控制策略进行静、动态性能验证。
3.2 关键技术
3.2.1 水面高速无人艇自主控制系统容错控制
该技术关系到水面高速无人艇自主控制功能实现与否,一旦容错失效,将导致灾难性后果。容错体现在以下几个方面:控制软件容错、控制硬件容错、控制指令容错,同时容错又有一定的限度,容错与安全性紧密相关。结合任务完成性目标,进行水面高速无人艇自主控制系统容错控制策略研究。
3.2.2 水面高速无人艇自主决策
水面高速无人艇自主决策能力是实现任务完成性的基石,水面无人艇在实际海洋环境中航行,通过环境感知模块获取环境和敌我态势信息,实时评估任务完成性,模拟智能生物体做出正确决策是完成任务的前提,现有控制系统多借助于人工遥控实现,存在通信信息量大,反应时间长,自身安全性差的缺陷。因此水面高速无人艇自主决策技术是一项必须突破的关键技术,。
4 应对策略
针对我国无人艇方面的研究与国外先进水平还存在较大差距的情况,应积极开展无人艇各项关键技术的研究,推进无人艇的实用化进程。
1) 加强技术前沿的探索研究,尽快制定无人艇自主控制系统发展规划;
2) 加强顶层设计,根据信息化战争的特点和无人艇的使用要求,制定军民协同发展、多种装备协同发展的统一规划;
3) 制定无人艇标准体系,加强通用化、系列化和模块化设计,努力实现“互联、互通、互操作”的目标;
4) 充分发挥国防工业部门和自动化研究机构的主力军作用,加强基础理论和关键技术的预研及技术储备。
5 结 语
针对水面高速无人艇自主控制系统的若干问题进行了分析和研究,提出应奋起直追,同步研发,提升我国的综合竞争实力,加快实现强国之梦。
[1] US DOD, Unmanned systems road map 2007-2032[Z], 2007.
[2] 贾 宾,刘 蕾,刘 斌. 蓬勃发展中的美国海军无人系统[J]. 现代电子工程,2008(1):14-20.
[3] 罗纳德,欧罗克. 美国海军无人系统的发展文集[M],伍其荣. 2007.
[4] 李家良. 水面无人艇发展与应用[J]. 火力与指挥控制,2012, 37(6): 203-207.
[5] 尚燕丽. 海军发展无人作战平台的需求、现状与展望[J]. 国防技术基础,2009(1): 40-44.
