航天器组合体能量平衡分析系统设计及应用
2013-12-29任筱强王鹏鹏
任筱强 王鹏鹏
(中国空间技术研究院载人航天总体部,北京 100094)
1 引言
能量平衡分析在航天器方案设计阶段用于为电源系统供电功率量级设计提供数据基础,在航天器在轨运行阶段预计并规划能量的使用情况。不同于单航天器的运行模式,航天器组合体中航天器间的相互遮挡,以及复杂的飞行模式,对航天器间的电源分配及其能量平衡分析提出了新的要求。针对航天器组合体运行需求,本文分析了传统能量平衡算法的不足之处,提出了改进方法。该方法首次将飞行模式设置模块、遮挡计算模块、并网供电设置模块及电源系统故障设置模块等并入能量平衡计算系统,能准确计算出组合体中各航天器的主电源能量平衡情况,可为组合体中不同航天器间的电源分配策略及飞行程序设计提供依据,保证在轨供电的稳定性和安全性。
2 组合体能量平衡分析方法改进
多个航天器形成组合体以及组合体运行的任务特点包括:①目前,多数航天器寿命长,太阳电池阵、蓄电池组的输出能力随运行时间有较大变化;②航天器组合体系统庞大,各分系统工作模式、故障模式复杂,负载较高且随时间变化较为频繁;③为适应交会对接、对地观测等不同的任务需求,组合体运行模式多样化,飞行模式的不同会影响太阳电池阵的发电量;④组合体的航天器间会形成较大遮挡[1],且随着组合体规模的扩大、航天器的增多,遮挡会越严重,在不同的飞行模式下遮挡图形复杂多变,对太阳电池阵的发电量造成明显影响[2];⑤为实现组合体中各航天器电源的合理利用,要进行并网供电[3-4]。
上述5个特点使能量平衡计算复杂化,通过简单的保守估算不利于能量的合理利用,而传统的单航天器能量平衡分析,不考虑多个航天器间的遮挡[5],计算精度低,尤其是在故障模式下,人工计算效率低、出错率高,已不能满足同时进行多航天器能量平衡计算的要求。为此,本文对组合体能量平衡分析系统功能进行了总体规划,设计思路见图1。该总体规划针对组合体的运行特点,体现了以下几方面改进。
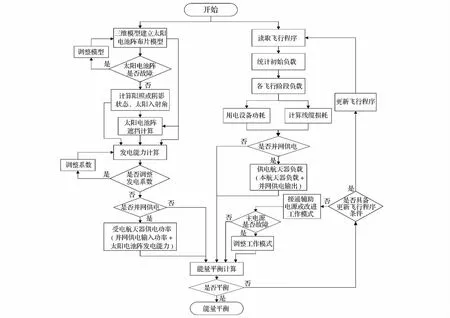
图1 改进后的能量平衡分析流程图Fig.1 Flow figure of improved energy balance analysis
(1)提高太阳电池阵发电能力计算精度。通过计算航天器运行轨道,精确计算太阳入射角,建立航天器三维模型计算太阳电池阵遮挡图形,结合太阳电池阵的布片情况,计算遮挡对发电能力的影响。
(2)提高长期在轨运行适应性。设置太阳电池阵、蓄电池组输出衰降系数,通过修改系数来满足长寿命运行状态下的能量平衡分析要求。
(3)增加故障状态设置功能。通过电源系统状态设置,应对故障状态下的能量平衡分析,为在轨快速决策提供理论基础。
3 组合体能量平衡分析系统设计
组合体能量平衡分析系统包括能量平衡分析模块和在轨实时监控模块。
3.1 能量平衡分析模块
能量平衡分析模块包括太阳电池阵发电能力计算子系统、整器负载计算子系统和能量平衡计算子系统,可完成电源系统正常及故障状态下太阳电池阵的遮挡分析、发电能力分析、整器负载变化计算,并在此基础上通过能量平衡分析预测后续能量平衡情况,再根据能量平衡情况对电源系统进行配置。
1)太阳电池阵发电能力计算子系统
太阳电池阵发电能力计算子系统包括航天器三维模型建立模块、轨道计算模块、太阳电池阵遮挡计算模块及太阳电池阵发电计算模块。三维模型建立模块用于建立单航天器以及航天器组合体的三维模型,包括舱体及太阳电池阵,用户通过输入边界尺寸实现建模,为后续的太阳电池阵遮挡计算提供输入。轨道计算模块用于计算不同轨道和姿态信息对太阳电池阵发电能力的影响,可通过轨道及姿态参数设置,计算得出不同飞行状态下组合体进出影时间、轨道面太阳入射角。遮挡计算模块用于计算在不同飞行姿态、不同太阳电池阵控制模式下对太阳电池阵的遮挡形状及遮挡率。在此基础上,可精确计算太阳电池阵的发电能力,发电功率计算公式见式(1)。在太阳电池阵布片方案确定后,其输出能力取决于太阳入射角及遮挡率。太阳电池阵发电计算模块内嵌有精确的太阳电池阵布片信息和太阳电池片发电模型,可对电池片类型及发电衰降系数进行设置,计算太阳电池阵供电电压、电流和充电电流。

式中:α为太阳入射角,即太阳光与太阳电池阵法线的夹角;P0为太阳入射角为0°时单个太阳电池片输出功率;Ns和Np分别为太阳电池片串联数和并联数;Z为被遮挡的太阳电池串与太阳电池串总数的百分比;F为太阳电池衰减因子[6-7]。
2)整器负载计算子系统
负载为当前处于工作状态的用电设备总功耗,可根据初始负载开机状态,结合现有飞行程序中的设备加断电指令,计算对应时段的负载随时间的变化情况。为适应飞行程序模块化设计,该子系统可将读入的飞行程序作为多个模块进行灵活的删除、插入等调整,系统根据时间自动进行排列,相对于以往人工调整的方式,极大地提高了工作效率和准确性。
3)能量平衡计算子系统
能量平衡分析要对主电源充放电容量进行计算,相关公式如下。
阳照区充电容量为
式中:Ⅰci为第i时段的充电电流;ηc为充电效率;Ti为第i时段的充电时间;n为充电总时段数。
不同的蓄电池组有不同的充电策略,均通过调整充电电流实现[8]。
阳照区放电容量Cd1计算见式(3)。若阳照区太阳电池阵供电、并网供电及辅助电源共同输出的功率不能满足负载需求,则需要主电源蓄电池组补充供电,这会造成主电源的容量消耗。

式中:PLi为第i时段的负载大小;Pi为第i时段太阳电池阵的供电功率;Pbi为第i时段的并网供电功率;Pfi为第i时段辅助电源承担的负载功率;Vdi为第i时段电池组的放电平均电压;ηd为电池组的放电效率;ΔT为计算步长。
阴影区放电容量为

若C0-Cd1-Cd2+Cc≥C(C和C0分别为总容量和初始容量),则主电源能量平衡[5,9]。
系统设计具有人机交互界面,用户可设置并网功率大小及流向,以及太阳电池阵、蓄电池组状态和辅助电源状态。设置完成后,在上述太阳电池阵发电能力、负载计算的基础上,计算出主电源的能量平衡情况,并根据分析结果对电源系统的使用或对飞行程序进行调整,经过数次迭代后使之趋于合理。同理,该系统可以进行电源系统故障状态下的能量平衡分析,可在用户交互界面中对太阳电池阵、蓄电池组状态进行设置,可实现如单翼故障、双翼故障、单机组故障、双机组故障等多种故障模式,为故障排除以及故障发生后应急飞行计划的设计提供数据支持。
3.2 在轨实时监控模块
在轨实时监控模块的主要功能是接收遥测数据,并将重要参数显示为曲线,与能量平衡计算得出的理论曲线在同一窗口内同步显示,包括整器负载、主电源充放电电流、主电源放电容量等,可反映电源系统的工作状态是否与理论值一致,便于及时发现问题。第3.1节中分析得出的用电设备的加断电状态,也可在监控模块中与遥测下传信息比对,以确保设备用电状态正常。
人机交互界面上具有遥测参数接收网络端口设置选项,用户可根据监控需求对遥测参数进行自行配置,界面友好;为适应航天器不同阶段、不同位置的测试及运行要求,用户可以对服务器进行配置,以选取所需的数据源。
4 系统应用
本文设计的分析系统先后在中国首次无人交会对接和首次载人交会对接地面飞行控制任务中应用,预测值通过实际轨道数据以及任务注入的飞行程序为输入计算得出,目的是从主电源能量平衡的角度校验飞行程序设计是否合理,遥测值通过接收航天器下传数据得出。系统的全部功能在实际任务中均得到了验证,通过理论计算结果与航天器下传的图像、遥测参数进行比对可知,系统计算结果与实际测量值基本吻合,具体结果如图2~图5所示。
图2为能量平衡分析系统计算的目标飞行器对飞船太阳电池阵造成的遮挡形状和同时刻飞船摄像机拍摄的太阳电池阵遮挡图像。通过对比可以发现,两形状一致,表明该系统的太阳电池阵遮挡计算功能满足要求。图3为计算的飞船主电源充放电电流和飞船下行的充放电电流的比对情况,计算误差在±5%之间,表明该系统的太阳电池阵发电能力计算及实时监控功能满足要求。图4为计算的整船负载和飞船下行的整船负载的比对情况,两曲线重合,表明该系统的负载计算及实时监控功能满足要求。图5为计算的飞船电池组容量和飞船遥测下行的电池组容量的比对情况,两曲线基本重合,表明该系统的能量平衡计算及实时监控功能满足要求。
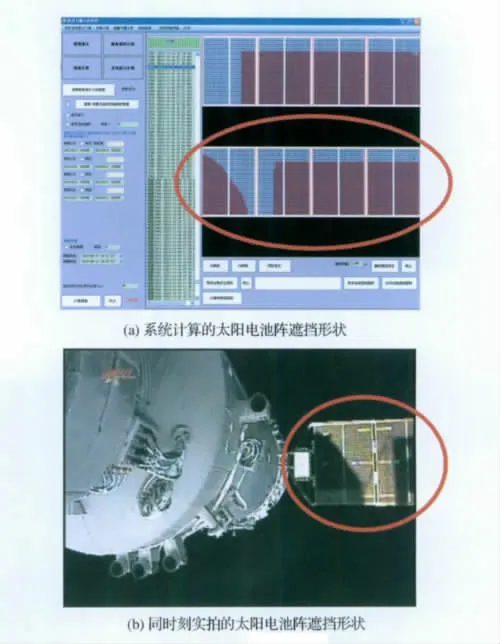
图2 飞船太阳电池阵遮挡形状比对Fig.2 Comparison of occlusion shapes of solar array
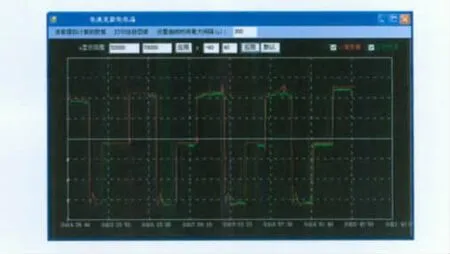
图3 蓄电池组充放电电流比对情况Fig.3 Comparison of main power charges and discharge currents
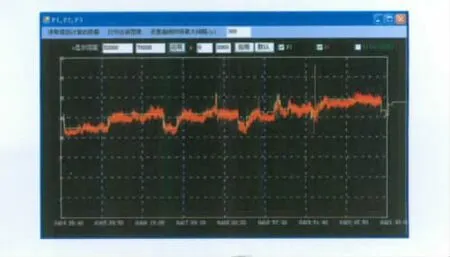
图4 整船负载比对情况Fig.4 Comparison of load value
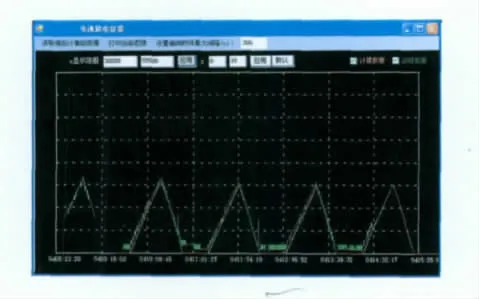
图5 蓄电池组容量比对情况Fig.5 Comparison of batteries’capacity
5 结束语
本文在分析航天器组合体任务特点的基础上,对传统的能量平衡分析方法进行了改进,并设计了分析系统。经2次实际飞行控制任务验证,该系统的计算精度满足任务需求。在后续的研究工作中,可通过建立航天器模型库,按任务需求对组合体模型进行扩展,为空间站建造过程中多种组合体构型情况下的能量平衡分析,以及电源系统使用规划提供支持。
(References)
[1]朱毅麟.空间站应用的发展及存在问题[J].航天器工程,2009,18(1):13-20
Zhu Yilin.Development and challenge of space station utilization[J].Spacecraft Engineering,2009,18(1):13-20(in Chinese)
[2]Hoffman D J,Kolosov V.Zarya energy balance analysis:the effect of spacecraft shadowing on solar array performance[C]//Proceedings of The 34th Intersociety Energy Conversion Engineering Conferences.British Columbia,Canada:the Society of Automotive Engineers Vancouver,1999:1-9
[3]谭小野,邓晓彬,李廷中.国际空间站电源系统发展研究[C]//第二十三届全国空间探测学术交流会论文集.北京:中国空间科学学会,2010:1-10
Tan Xiaoye,Deng Xiaobin,Li Tingzhong.Research on the development of International Space Station power system[C]//Proceedings of The 23th National Space Exploration Symposium.Beijing:Chinese Society of Space Research,2010:1-10(in Chinese)
[4]张大鹏,孟宪会.一种航天器间并网供电方案的研究[J].航天器工程,2009,18(5):101-107
Zhang Dapeng,Meng Xianhui.Research on parallel operation between power support systems of different spacecrafts[J].Spacecraft Engineering,2009,18(5):101-107(in Chinese)
[5]任筱强,于潇,马晓兵.神舟飞船实时能量平衡分析系统设计与应用[J].航天器工程,2009,18(5):48-53
Ren Xiaoqiang,Yu Xiao,Ma Xiaobing.Design and implementation of real time energy balance analysis system on Shenzhou manned spaceship[J].Spacecraft Engineering,2009,18(5):48-53(in Chinese)
[6]李国欣.航天器电源系统技术概论[M].北京:中国宇航出版社,2008
Li Guoxin.Overview of spacecraft power system[M].Beijing:China Astronautics Press,2008(in Chinese)
[7]吕风格,赵继广.微小卫星太阳电池阵的设计计算方法研究[J].装备指挥技术学院学报,2005,16(5):82-86
LüFengge,Zhao Jiguang.Research on design and calculation method of micro satellite solar array[J].Journal of the Academy of Equipment Command & Technology,2005,16(5):82-86(in Chinese)
[8]马世俊.卫星电源技术[M].北京:中国宇航出版社,2005
Ma Shijun.Satellite power system technology[M].Beijing:China Astronautics Press,2005(in Chinese)
[9]辜渝嘉,金小军,赵翔宇,等.皮卫星在轨能量平衡仿真及实验[J].传感技术学报,2010,23(6):829-833
Gu Yujia,Jin Xiaojun,Zhao Xiangyu,et al.On-orbit energy balance simulation and experiment of pico-satellite[J].Chinese Journal of Sensors and Actuators,2010,23(6):829-833(in Chinese)