小脉冲约束下的近圆轨道控制方法研究
2013-12-29黄美丽罗渠赵峭
黄美丽 罗渠 赵峭
(北京空间飞行器总体设计部,北京 100094)
1 引言
大部分的应用卫星都是近圆轨道卫星,其中又有很多是需要进行轨道控制的。以选用冻结轨道的遥感卫星为例[1-4],为避免卫星入轨之后进行减速机动,一般入轨时的初始轨道高度相对目标轨道高度有30km左右的负偏置,入轨之后需要由卫星利用自身的推力器进行变轨,将轨道抬升至目标轨道。特殊情况下,初始轨道高度的负偏置量还有可能大于30km,例如我国的海洋二号(HY-2)卫星[5],初始轨道高度的负偏置量为60km 左右。轨道半长轴a、偏心率e、近地点幅角ω三个参数的调整可以称为轨道平面内参数的调整,偏心率及近地点幅角(统称为偏心率矢量)的调整是通过横向脉冲(即在轨道平面内垂直于矢径,沿卫星运行方向)在调整半长轴的同时来完成的。对于半长轴负偏置量大于30km 的轨道,一般来说,调整偏心率矢量所需的半长轴调整量小于半长轴的偏置量。近圆轨道的控制根据控制前后平面内参数(半长轴、偏心率、近地点幅角)的要求,只需要两个横向脉冲速度增量就可以完成,在工程实现时一般根据总控制量、单次控制时长约束以及控制精度要求,将两个横向脉冲拆分为若干批次的双脉冲控制来完成。
采用传统的双脉冲控制方法[6-8],则一条轨道圈内至多只能进行两次轨道控制,在单次控制小脉冲约束下,单次控制量很小,若轨道调整量大,则总控制次数很多,整个控制周期很长。本文针对这一问题,提出了一种单次控制小脉冲约束下的近圆轨道平面内参数控制方法,增加在一条轨道圈内的轨道控制次数,可达到大幅缩短整个轨道控制周期的目的,保证在完成提升轨道高度的同时,完成偏心率及近地点幅角的调整。
2 双脉冲近圆轨道平面内参数控制方法
对近圆轨道控制一般采用简化的近似解析解,这种方法也是国际通用的,我国资源卫星(ZY)的轨道控制也成功地采用了这种方法。根据文献[6],令ex=ecosω,ey=esinω,Δa、Δex、Δey分别为a、ex、ey的总控制量。调整偏心率矢量所需的半长轴调整量Δae为

只需要两个横向脉冲速度增量就可以同时实现三个参数的调整。若恰当安排这两个脉冲的位置和大小,还可以使总的速度增量达到最小。具体来说可以根据Δa以及Δae的大小分为2种情况:
1)Δa>Δae
这种情况下,第一个速度增量的位置u1可以任选,位置选定后速度增量的大小ΔV1以及第二个速度增量的位置u2和大小ΔV2便都完全确定,而且两个速度增量是同向的:

式中:V为轨道速度。
2)Δa≤Δae
雌飞鱼会小心翼翼地将鱼卵产在棕榈叶的叶柄上,它们的卵又轻又小,卵的表面有许多丝状突起物,这些呈丝状且有一定黏性的突起物可以把飞鱼卵牢牢地缠在棕榈叶上。
这种情况下,两次机动的位置和速度增量的大小都是完全确定的,但速度增量的方向相反,位置正好相差180°:


上述两种情况中,两次机动的顺序都是可以交换的。
在实际工程应用中,一般选择将这两个脉冲分成若干个批次的双脉冲来进行控制,每组机动控制施加的速度增量位置不变,仅对速度增量的大小分批次进行,机动次数根据总控制量、单次控制时长约束以及控制精度要求综合确定。
3 小脉冲约束下的近圆轨道控制方法
双脉冲近圆轨道平面内参数控制方法,由于机动位置约束,一条轨道圈内至多只能进行两次机动控制,在单次控制小脉冲约束下,单次控制量很小,若轨道调整量大,则总控制次数很多,整个控制周期很长。
以海洋二号卫星为例,初始轨道高度的负偏置量为60km 左右,即卫星入轨后需要利用自身的推力器将轨道高度抬高60km 左右,才能进入正常的工作轨道。卫星入轨后,轨控推力器由于羽流扰动影响,在工作时会产生+Z向偏航扰动力矩,受磁卸载能力的影响,每轨喷气时间有限。以2个1N 的推力器同时点火为例,单次喷气最长时间仅为10s左右。这种情况下,若采用一个轨道圈2次机动的方式,则需要机动上千次,完成整个轨道控制需要上百天的时间。因此,需要提高机动变轨频率才有可能缩短多轨道控制时间。
3.1 控制原理和方法
对于我国的遥感卫星而言,一般星上安装的轨控推力器都是沿卫星本体-X方向安装的,正常对地姿态飞行的情况下,只能提供加速增量,要提供减速增量必须进行姿态180°机动。为了避免姿态机动,半长轴的入轨参数值一般都有偏置量,并且偏置量考虑了半长轴、偏心率以及近地点幅角的最大入轨误差。
由于运载火箭的实际入轨精度一般远远优于入轨精度要求,因此,调整偏心率及近地点幅角所需的半长轴调整量一般小于半长轴偏置量,即Δa>Δae。这种情况下,半长轴的总控制量大于调整偏心率矢量所需的半长轴调整量,因此,考虑将轨道平面内参数控制分为两个阶段:第一阶段控制目标是抬高半长轴,但保证偏心率基本不变;第二阶段是同时调整平面内参数半长轴、偏心率、以及近地点幅角。
这样划分的优点,在于要在偏心率基本不变的前提下达到抬高半长轴的目的,一条轨道圈内的轨道控制次数不局限于双脉冲近圆轨道平面内参数控制方法的两次,而是可以灵活地设置控制次数,从而达到增加一条轨道圈内轨道控制次数的目的。
(1)采取多点对称点喷方式,在一条轨道圈内进行多次变轨,保证偏心率基本不变。
多点对称点喷是指在一条轨道圈内均匀地进行多次小脉冲轨道机动控制,假定变轨次数为N(N为偶数),则相邻两次机动间的相位差为360°/N,即每隔1/N轨道圈进行一次机动。第一次机动的位置可以任选,N可以任选,脉宽根据变轨次数以及推力器点火时长约束确定。采取这种变轨方式,由于机动位置对称,且脉宽相同,机动的效果是半长轴均匀地抬升,而偏心率基本不变。
以4脉冲对称点喷为例,机动控制示意如图1所示。

图1 4脉冲对称点喷的机动示意图Fig.1 Drawing of 4-pulse maneuvering
多点对称点喷的控制量Δa1为

(2)采取双脉冲近圆轨道平面内参数控制方式,在一条轨道圈内进行两次变轨,在抬升轨道高度的同时,调整轨道偏心率及近地点幅角至目标值。
第二阶段的控制方式按照3.2节给出的双脉冲近圆轨道平面内参数控制方法进行控制,双脉冲的控制量为Δae,控制量及控制位置根据式(2)~(5)计算,可以分成多个批次进行,在抬升轨道高度的同时将偏心率及近地点幅角调整到位,最终捕获目标工作轨道。
3.2 算例
给定卫星初始轨道参数以及目标轨道参数见表1。

表1 主要轨道参数(平根)Table 1 Major Orbit Elements
根据表1计算得出,调整偏心率矢量所需的半长轴调整量Δae为6.75km,即第一阶段轨道半长轴调整量为47.55km,第二阶段轨道半长轴调整量为6.75km。
卫星在轨实际控制过程中,由于控制误差的影响,实际控制结果不可能与理论脉冲计算结果完全一致,为避免第二阶段的控制出现减速机动的情况,在第一阶段控制预留1km 的余量,即第一阶段轨道半长轴调整量为46.55km,第二阶段轨道半长轴调整量为7.75km。
选取4个1N 推力器联合进行变轨,每圈16脉冲机动控制,脉宽4s,将轨道半长轴抬高46.55km,通过商业STK 软件进行仿真,第一阶段偏心率及近地点幅角的变化情况如图2~图4所示。相比每圈2脉冲机动控制,16脉冲可以将控制周期缩短到1/8。
第一阶段控制结束后,轨道参数:①半长轴为7 333.98km;②偏心率为0.001 929 410 8;③近地点幅角为108.667 949°。
对比初始轨道参数可以看出,偏心率变化很小,可以近似认为基本不变。
第二阶段半长轴的控制量为7.75km,根据第二阶段轨道参数的调整量关系分析可知,控制方法应采用双脉冲近圆轨道平面内参数控制方法的第一种情况,第一个速度增量位置u1可以任选,考虑到实际情况中卫星在我国国境内时的相位位置为30°或150°附近,可以安排第一次脉冲控制在我国地面测控站弧段可见的范围内实施,故选择第一个速度增量位置u1=30°。由式(1)~式(4)可得,双脉冲控制的控制量及位置为:①第一个速度增量位置u1=30°;②第一个速度增量大小ΔV1=0.655 12m/s;③第二个速度增量位置u2=301.835 5°;④第二个速度增量大小ΔV2=3.240 09m/s。
针对上述计算结果,通过STK 商业软件进行仿真,仿真结果表明,半长轴、偏心率及近地点幅角通过一组双脉冲控制或分成若干个批次的双脉冲控制可以同时达到目标值,实现目标轨道捕获。
我国的海洋二号卫星,其轨控推力器每轨只能进行小脉冲轨道机动控制,按传统的双脉冲控制方法需要112d,采用了上述轨道控制方法,在14d进行了1578次轨道机动,完成了全部轨道调整,进入目标工作轨道,控制时间缩短了98d。
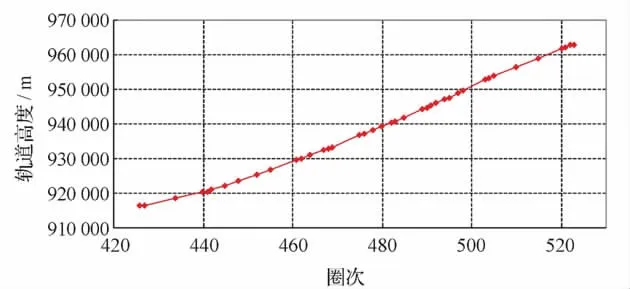
图2 16脉冲对称点喷的半长轴变化Fig.2 Variation of semi-major axis under 16pulses

图3 16脉冲对称点喷的偏心率变化Fig.3 Variation of eccentricity under 16pulses
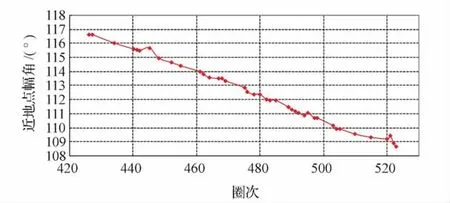
图4 16脉冲对称点喷的近地点幅角变化Fig.4 Variation of argument of perigee under 16pulses
4 结束语
本文提出的小脉冲约束下的近圆轨道平面内参数控制方法,通过多点对称点喷以及双脉冲控制两阶段轨道调整,可在第一阶段多点对称点喷控制环节增加一条轨道圈内的轨道控制次数,大幅缩短整个轨道控制周期,完成目标轨道捕获。这种控制方法可以应用于轨道平面内参数调整量较大但单次点火时长限幅较小的卫星,使卫星在最短的时间内进入目标轨道,执行飞行任务。
(References)
[1]杨维廉.冻结轨道的一阶解[J].中国空间科学技术,2002,22(4):45-50
Yang Weilian.A first order solution for frozen orbit[J].Chinese Space Science and Technology,2002,22(4):45-50(in Chinese)
[2]Brouwer D.Solution of the problem of artificial satellite theory without drag[J].Astronautical Journal,1959,64:378-397
[3]杨维廉.基于Brouwer平根数的冻结轨道[J].中国空间科学技术,1998,18(5):13-18
Yang Weilian.Frozen orbit based on brouwer mean orbit elements[J].Chinese Space Science and Technology,1998,18(5):13-18(in Chinese)
[4]陈洁.太阳同步卫星的轨道设计[J].上海航天,2004,21(3):34-38
Chen Jie.Orbit design of Sun-synchronous satellite[J].Aerospace Shanghai,2004,21(3):34-38(in Chinese)
[5]王敏.海洋二号卫星工程创造五个“第一”[J].中国军转民,2011(9):78-79
Wang Min.The five‘First Times’created by HY-2project[J].Defense Industry Coversion in China,2011(9):78-79(in Chinese)
[6]杨维廉.近圆轨道控制的分析方法[J].中国空间科学技术,2003,23(5):1-5
Yang Weilian.An analytical method for controlling near circular orbits[J].Chinese Space Science and Technology,2003,23(5):1-5(in Chinese)
[7]肖业伦.航天器飞行动力学原理[M].1版.北京:中国宇航出版社,1995
Xiao Yelun.Flight dynamics theory of spacecraft[M].1st ed.Beijing:China Astronautics Press,1995(in Chinese)
[8]刘林.航天器轨道理论[M].北京:国防工业出版社,2000
Liu Lin.Orbit theory of spacecraft[M].Beijing:Nationa1Defense Industry Press,2000(in Chinese)