一种基于协作和多普勒频移的车辆定位算法
2013-12-26邵震洪MohamedMohsen沈连丰
邵震洪 杨 琼 吴 怡 Mohamed Mohsen 沈连丰
(1东南大学移动通信国家重点实验室, 南京 210096)
(2南京电讯技术研究所, 南京 210007)
(3福建师范大学光电与信息工程学院, 福州 350001)
车辆间自组织网(vehicular ad hoc network,VANET)是一种在交通领域应用的特殊区域性自组织无线通信网络,在汽车安全、交通管理以及车内信息娱乐服务等领域正发挥着越来越重要的作用,受到了各国政府、产业界和学者们的广泛关注[1-5].美国联邦通信委员会(FCC)为专用近程车间通信(DSRC)分配了5.9GHz频率上共75MHz带宽的专用频段,美国电气和电子工程师协会(IEEE)也制定了包含MAC层和PHY层的VANET通信协议标准IEEE 802.11p以及上层协议簇IEEE 1609.
VANET的一些安全类应用如碰撞告警、车道保持等对车辆定位的准确性、实时性和连续性等性能要求都很高,但现有的技术都存在一些问题.考虑到成本和互补性,车辆定位一般采用GPS/INS组合方式[6],并利用神经网络技术来融合GPS/INS信息[7],这种方式在GPS信号被遮挡时由INS提供连续的定位数据,但由于惯性器件固有的误差累积问题,其最终的定位精度通常都不高.差分GPS(DGPS)可以提供很高的定位精度[8],可应用于车辆协作碰撞告警等场合[9],但城市环境多径效应影响严重,如在隧道和高楼树木密集的地区,其性能也大大下降.文献[10]采用图像、视频处理技术来分辨信号灯和车道以达到辅助定位导航的目的,文献[11]组合利用DGPS和视频处理技术来达到车道级导航的目的,但其算法都比较复杂且对硬件要求较高.文献[12]利用RSSI测距技术来进行车辆定位,但该方法受环境影响较大,精度不高.文献[13]利用VANET和车辆间测距技术来定位,但它需要一些额外的设备如雷达或超声波测距设备,增加了成本和信号处理复杂度.由于道路上的车辆始终处于运动状态,其与路边设备和邻居车辆的无线通信存在多普勒频移(DCFO),文献[14]提出利用测量路边节点发出信号的载波频移来进行车辆定位,取得了较好效果,甚至可以达到车道级的定位精度[15],但是这种技术需要增加路边节点,大大增加成本,且路边节点发射信号的功率有限,实用性较低.
本文提出一种基于车辆间协作和DSRC信号多普勒频移的算法(CDCFO),并采用无迹卡尔曼滤波器(UKF)来融合和处理多车辆间相互关联的状态和测量信息,以提高对车辆的定位精度.仿真结果验证了该算法的有效性和可靠性.
1 车辆间的多普勒频移
多普勒频移是由于辐射源与接收机之间存在相对运动而产生的接收频率与发射信号实际频率之间的偏差.道路上行进的车辆间由于存在速度和位置差异,必然存在多普勒频移.下面分析图1所示行进中车辆间的多普勒频移情况.不失一般性,这里考虑一条4车道的道路,每个车道有1辆车,车C1和车C0同向,车C2,C3和车C0反向相行,所有车均只在x轴方向匀速行驶.各车相对于车C0的多普勒频移可表示为

(1)
式中,ft为发送频率;c为光速;ri0为各车到车C0的距离;t为时间.
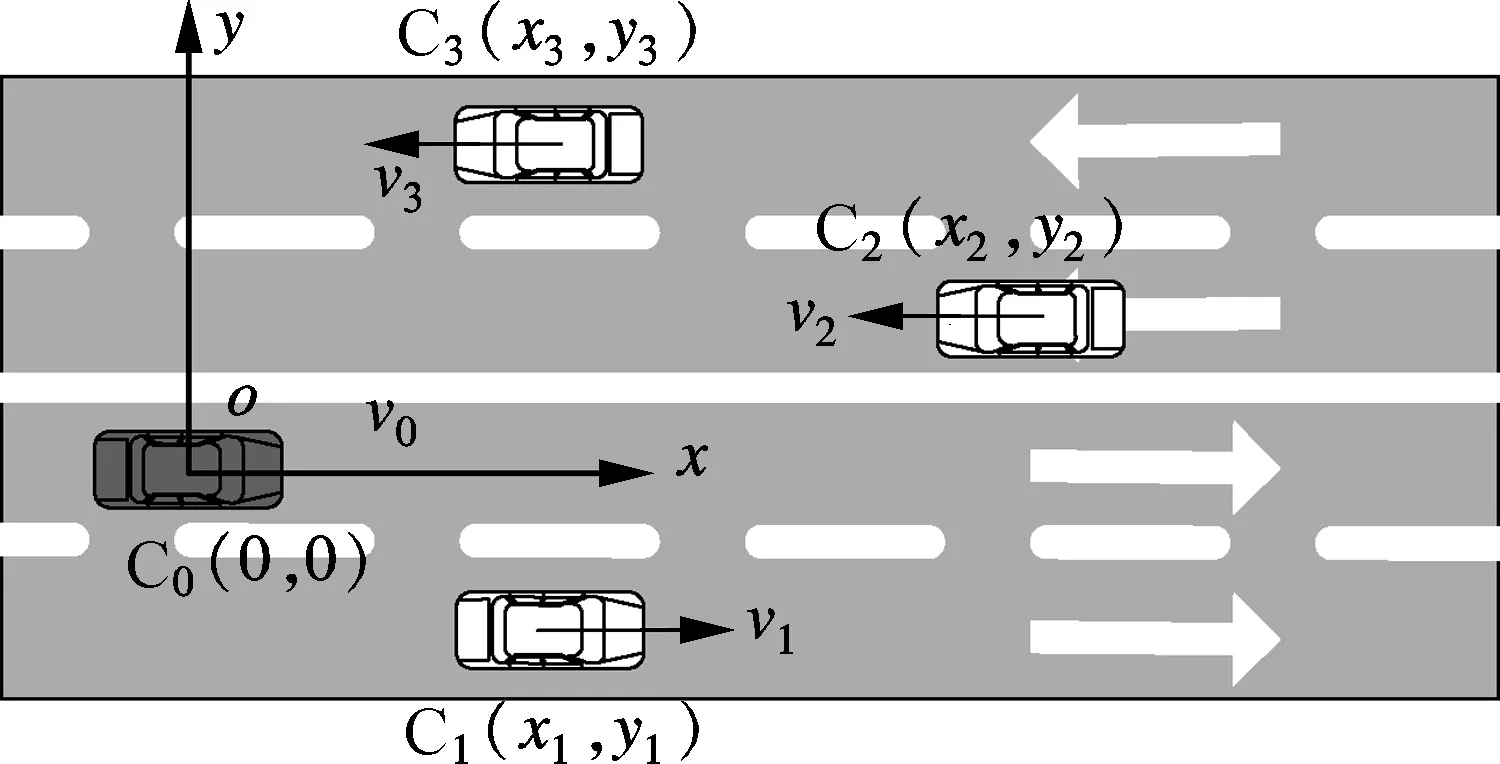
图1 行进中车辆间的多普勒频移计算示意图
如果以地平面建立一个二维坐标系,以车C0的质心作为坐标原点,位置坐标为(0,0),速度为v0,则式(1)转化为
(2)
式中,vi为各车速度;(xi,yi)为各车质心相对车C0质心的坐标.
假设ft取5.9GHz,车道宽3.5m,所有车都在车道中间行驶,车C0和C2的速度为50km/h,车C1和C3的速度为40km/h,以车C0为参考物,则各车的多普勒频移如图2所示.
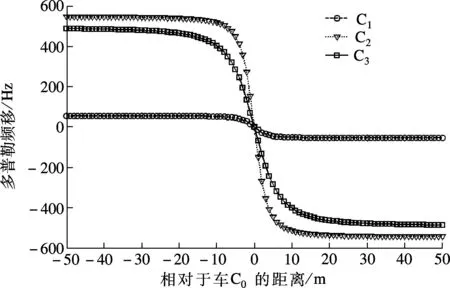
图2 各车相对于车C0的多普勒频移
从图2中可看出,多普勒频移与车辆间纵向距离和相对速度息息相关,相对速度越大,多普勒频移越大;纵向距离越大,多普勒频移的斜率越小;在横向距离为零(即没有径向相对速度)时,多普勒频移为零.
2 系统模型
考虑一般的情况,车C0和Ci在y轴上也有速度分量,如图3所示.则式(1)应修正为
(3)
且有
φ0=θ0-βi0,φi=θi-βi0i=1,2,3




图3 两车速度矢量不在一条直线上的多普勒频移计算示意图
在式(3)中,如果需要计算车C0的位置,则需确定多普勒频差Δfi以及邻居车辆的位置和速度.一般地,多普勒频差Δfi可通过DSRC接收设备测量来得到,位置信息(xi,yi)和速度vi也可通过GPS或北斗等接收设备测量得到,而这些测量值都是随机信号,具有一定的误差,可采用时域滤波器如Kalman滤波器来滤除这些误差.为此,本文提出一种基于车辆间信息共享协作和多普勒频移的车辆定位算法,并且使用UKF来提高车辆的定位精度,其系统结构如图4所示.
假设每辆车都装备了GPS设备以及和周围其他车辆进行无线通信的DSRC设备,且每辆车都定时地把自身的位置、速度以及加速度等信息向周围节点发送,同时DSRC接收设备可以测量DSRC信号的多普勒频差.在图4中,GPS和DSRC设备测量得到的位置、速度以及频差数据,还有通过DSRC设备得到的邻居车辆节点的状态和测量数据,都汇集到车辆机动模型中,最后通过UKF对车辆位置、速度等状态进行准确估计.

图4 系统结构框图
2.1 状态方程
根据Kalman滤波理论,可得到如下离散化的状态方程[16]:
X(k+1)=Φ(T,α)X(k)+W(k)
(4)
(5)
式中,Φ为状态转移矩阵;T为采样周期;α为机动时间常数的倒数,且

(6)
W(k)为离散时间高斯白噪声序列,且系统噪声协方差矩阵为

(7)
其中,σa为机动加速度方差,且
(8)
2.2 测量方程
离散化的测量方程为
Y(k)=h(X(k))+V(k)
(9)
Y(k)=[xg,yg,vg,Δf]T
(10)
V(k)=[nx,ny,nv,nΔf]T
(11)
式中,h(·)为转移函数;V(k)为测量噪声;(xg,yg),vg分别为GPS输出的位置和速度测量值;Δf为多普勒频差测量值,可采用式(3)进行计算;nx,ny,nv分别为GPS输出的位置和速度测量噪声;nΔf为多普勒频差测量噪声.噪声矩阵V(k)的方差为
(12)

当使用扩展卡尔曼滤波器(EKF)时,需要在当前时刻系统状态的估计值处进行泰勒级数展开,其雅克比矩阵可表示为

(13)
3 UKF滤波过程
由于车辆位置、速度和多普勒频差存在非线性关系,不能使用标准Kalman滤波器.作为改进形式,扩展卡尔曼滤波器是将非线性的系统方程在当前时刻系统状态的估计值处展开,并只截取一阶项,从而得到与标准卡尔曼滤波相同的线性递推形式.但是EKF忽略了二阶以上的高阶项,因此在某些情况下会存在较大误差.而UKF采用一组确定的采样点来模拟状态参量的分布特征,不需要进行线性化近似,因此能够避免EKF中忽略高阶项带来的误差,其可以获得优于EKF的滤波性能[17-18].UKF滤波步骤如下:
① 初始化

(14)

(15)
② 计算Sigma值和加权系数
(16)
(17)
③ 时间更新
(18)
(19)
④ 测量更新
(20)
(21)
(22)
(23)
(24)
(25)
4 仿真结果与分析
本文使用Matlab 2008作为仿真工具,在相同条件下,对使用GPS,CDCFO-EKF和CDCFO-UKF算法定位的性能,进行200次Monte Carlo仿真.仿真结果采用平均误差E和均方根误差(RMSE)来评价,其表达式分别为
(26)

(27)
仿真场景如图5所示.假设在一个长5km的双向四车道的城市道路,车C0在0 km处开始作匀速直线运动,速度为50km/h,目标运动总时间为360s.行驶途中,其GPS信号分别遭受1次轻微和1次严重多径衰落.在开阔地带,GPS的精度为10m,轻微多径衰落时为50m,严重多径衰落时为150m.车C0和在自己一跳通信范围内(R=250m)的邻居车辆实时交换位置、速度等状态信息,并测量其信号的多普勒频差.每条车道上的车辆以平均间距d=100m随机分布,且中间2个车道的车辆以50km/h、外侧2个车道的车辆以40km/h的速度匀速行驶.

图5 仿真场景图(单位:km)
根据上述假设,得到位置估计平均误差和均方根误差随时间变化的曲线,如图6和图7所示.并对开阔地带、弱多径衰落、强多径衰落3种场景进行统计平均,其结果分别如表1和表2所示.

图6 位置估计平均误差
从图6和表1中可看出,位置估计平均误差总体相差不大,在开阔地带GPS的误差最小,但当遭受多径衰落时,其平均误差稍微偏大;CDCFO-EKF和CDCFO-UKF比GPS的平均误差变动幅度大一些,但受多径衰落的影响较小.从图7和表2中可看出,由于遭受多径衰落,GPS的均方根误差变化很大,从10m左右迅速上升到50和150m左右,但是本文2种算法在GPS多径衰落时其误差估计的均方根值变化比较平缓,尤其是CDCFO-UKF算法相对于GPS,性能得到明显改善.

图7 位置估计均方根误差
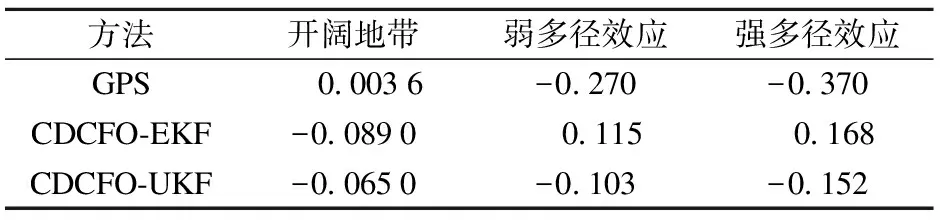
表1 位置估计平均误差统计 m
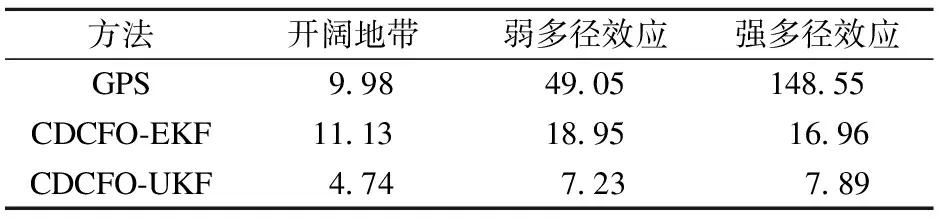
表2 位置估计均方根误差统计 m
综上所述,本文算法对误差估计的均方根性能改善明显,可以极大降低GPS多径衰落的影响,且基于UKF滤波器的误差更小,这是因为多普勒频移和位置的关系是非线性的,而UKF在非线性系统中比EKF性能更好.
5 结语
通过车辆间的协作共享,使得多车辆相互存在关联的位置、速度以及多普勒频移等状态和测量信息可以被有效融合和处理,从而提高车辆运动状态估计和预测的精度.由于UKF比EKF更适合非线性系统,所以使用本文提出的CDCFO-UKF算法对车辆进行定位的性能更好.但是对一些需要更快速、更高精度的VANET安全类应用来说,如高速公路雾天“盲”驾驶等,还需要融合其他更多测量和状态信息,如高精度的车载雷达测距、包含详细车道信息的高精度电子地图等,这有待下一步继续深入研究.
)
[1] Hartenstein H, Laberteaux K P. A tutorial survey on vehicular ad hoc networks [J].IEEECommunicationsMagazine, 2008,46(6): 164-171.
[2] Boban M. Impact of vehicles as obstacles in vehicular ad hoc networks [J].IEEEJournalonSelectedAreasinCommunications, 2011,29(1): 15-28.
[3] Zang Y P, Stibor L, Reumerman H J, et al. Wireless local danger warning using inter-vehicle communications in highway scenarios [C]//The14thEuropeanWirelessConference. Prague, Czech Republic, 2008: 4623905-01-4623905-07.
[4] Biswas S. Vehicle-to-vehicle wireless communication protocols for enhancing highway traffic safety [J].IEEECommunicationsMagazine, 2006,44(1): 74-82.
[5] Tatchikou R, Biswas S, Dion F. Cooperative vehicle collision avoidance using inter-vehicle packet forwarding [C]//IEEEGlobalTelecommunicationsConference. St. Louis, MO, US, 2005: 2762-2766.
[6] Noureldin A,Karamat T B, Eberts M D, et al. Performance enhancement of MEMS-based INS/GPS integration for low-cost navigation applications [J].IEEETransactionsonVehicularTechnology, 2009,58(3): 1071-1096.
[7] Pang C P, Lid Z Z. Bridging GPS outages of tightly coupled GPS/SINS based on the adaptive track fusion using RBF neural network [C]//IEEEInternationalSymposiumonIndustrialElectronics. Seoul, Korea, 2009: 971-976.
[8] Rezaei S, Sengupta R. Kalman filter-based integration of DGPS and vehicle sensors for localization [J].IEEETransactionsonControlSystemsTechnology, 2007,15(6): 1080-1088.
[9] Tan H S, Huang J H. DGPS-based vehicle-to-vehicle cooperative collision warning: engineering feasibility viewpoints [J].IEEETransactionsonIntelligentTransportationSystems, 2006,7(4): 415-428.
[10] Conte G, Doherty P. Vision-based unmanned aerial vehicle navigation using geo-referenced information [J].EURASIPJournalonAdvancesinSignalProcessing, 2009,1(1): 1-18.
[11] Vu A, Ramanandan A, Chen A, et al. Real-time computer vision/DGPS-aided inertial navigation system for lane-level vehicle navigation [J].IEEETransactionsonIntelligentTransportationSystems, 2012,13(2): 899-913.
[12] Parker R, Valaee S. Vehicular node localization using received-signal-strength indicator [J].IEEETransactionsonVehicularTechnology, 2007,56(6): 3371-3380.
[13] Drawil N M, Basir O. Intervehicle-communication-assisted localization [J].IEEETransactionsonIntelligentTransportationSystems, 2010,11(3): 678-691.
[14] Xu B,Shen L F,Yan F. Vehicular node positioning based on Doppler-shifted frequency measurement on highway [J].JournalofElectronics:China, 2009,26(2): 265-269.
[15] Alam N, Balaei A T, Dempster A G. An instantaneous lane-level positioning using DSRC carrier frequency offset [J].IEEETransactionsonIntelligentTransportationSystems, 2012,13(4): 1566-1575.
[16] 常青, 杨东凯, 寇艳红. 车辆导航定位方法及应用 [M]. 北京: 机械工业出版社,2005:88-92.
[17] Julier S J, Uhlmann J K. Unscented filtering and nonlinear estimation [J].ProceedingsoftheIEEE, 2004,92(3):401-422.
[18] Qasem H, Reindl L. Unscented and extended Kalman estimators for non linear indoor tracking using distance measurements [C]//IEEE4thWorkshoponPositioning,NavigationandCommunication. Hannover, Germany, 2007: 177-181.
