螺旋桨噪声中轴频的闭环检测方法
2013-12-26罗昕炜方世良
罗昕炜 方世良
(东南大学水声信号处理教育部重点实验室,南京210096)
水下螺旋桨在不均匀流场工作使其叶片在流场不同位置产生不同程度的空化,这种叶片转动中空化程度的周向变化使螺旋桨对其辐射的噪声产生幅度调制作用.因此,螺旋桨噪声中蕴含着丰富的周期性调制成分,反映了螺旋桨类型、桨数、叶片数、转速、空化程度及不均匀流场分布等信息,是水声目标识别的主要信息源之一.
DEMON处理方法是提取水声信号调制特征的有效手段.国外很早就开展了对螺旋桨噪声的分析.文献[1]提出了舰船螺旋桨转速的最大似然估计方法.文献[2]计算了声纳宽带调制参数估计的Cramer-Rao下限.由于螺旋桨设计和制造工艺的日益成熟,螺旋桨噪声功率大大减弱,使得通过DEMON分析方法获取螺旋桨转速、叶片数和桨数愈加困难.随着现代信号处理技术的发展,近几年各种信号处理方法在螺旋桨噪声特征提取中的应用研究大量出现.如文献[3]提出利用EMD分解和奇异值分解相结合的方法,从复杂舰船辐射噪声中提取螺旋桨的空化调制成分.文献[4]提出一种利用EMD分解提取螺旋桨工况变化条件下的瞬时转速特征的方法.文献[5-6]研究了水声目标辐射噪声中单频分量检测方法和性能,并进行了数值仿真.文献[7]基于Hough变换和二值化DEMON谱图的分析方法,用于估计螺旋桨的加速度参数.文献[8]利用相移小波变换的方法提取信号的包络,以提高包络检测的性能.文献[9]针对螺旋桨叶片数识别问题,建立空化噪声信号模型,推导了谐波族结构特性的表达式,并用实测数据进行了验证.文献[10]采用数值计算的方法研究螺旋桨黏性空化流场中的空化特征.文献[11]设计了一种基于循环调制相干理论的统计检验方法进行包络线谱检测.上述方法中,DEMON线谱检测和轴频估计是分别考虑的.处理流程中,首先进行DEMON线谱的检测,当检测器判决线谱存在时,再估计轴频.这种结构使得检测器和估计器之间缺乏信息的交互,检测器不能利用估计器的结果,而估计器从检测器获得的也仅仅是一个信号有无的二元开关量.这种信息交互上的缺失会带来检测和估计上的性能损失.
本文将联合检测和估计技术应用于DEMON分析算法,提出基于联合检测与估计的DEMON算法(JDEMON).该算法中估计器的输出被检测器用来改善未知参量的先验信息,同时检测器提供给估计器的是连续取值的检测似然比,而不是离散的判决量.这样,检测器和估计器形成一种闭环结构,通过估计器信息的反馈,达到检测器和估计器之间的充分耦合,进而获得更好的检测和估计性能.
1 DEMON处理原理
水声目标辐射噪声通常是宽带调制信号.通过对噪声的解调处理提取解调谱中的线谱,其位置对应着螺旋桨的轴频、叶频及谐波信息,是目标检测及分类识别的重要信息.对于受到一组谐波信号调制的宽带噪声信号,信号可表示为
x(t)=[1+m(t)]s(t)+g(t)=
(1)
式中,s(t)和g(t)分别为受调制的宽带噪声和环境噪声;m(t)为周期调制信号;ωs为调制信号基频;Ai和θi为第i次谐波调制信号的幅度和相位;N为调制谐波的总次数.在假定s(t)和g(t)为相互独立的零均值高斯白噪声的条件下,对x(t)采样后的离散信号x(ti)进行线谱最大似然检测可得到下式[1]:


(2)
式中,x为离散信号x(ti)对应的信号向量;ti为离散采样时刻;ωk为估计的调制信号基频;pX(x|ωk)为假设基频为ωk条件下观测向量x的概率;N0/2为g(t)的方差;K为观测窗长度,当K大于调制周期时,KD为常量.使式(2)取得最大值的ωk即为轴频估计.图1给出了DEMON分析的处理流程.
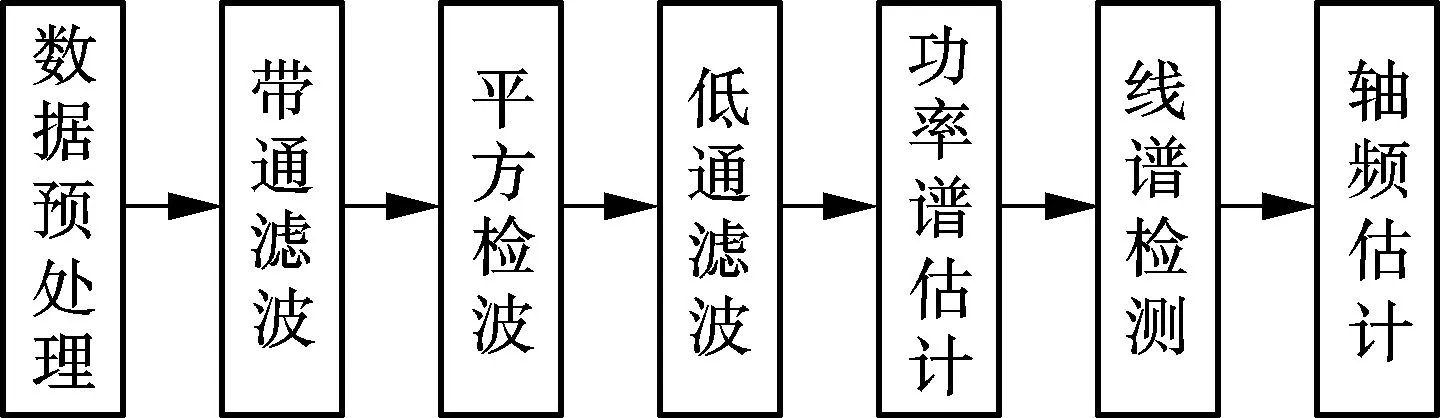
图1 DEMON分析处理流程
2 DEMON处理的改进策略
在传统的DEMON处理中,首先将噪声数据进行检波和特征变换,得到DEMON谱数据,然后对DEMON谱数据进行线谱检测,若检测器判决H1即认为线谱成分存在.对检测得到的一组线谱进行基频频率估计,就得到了螺旋桨的轴频.处理流程如图2所示.
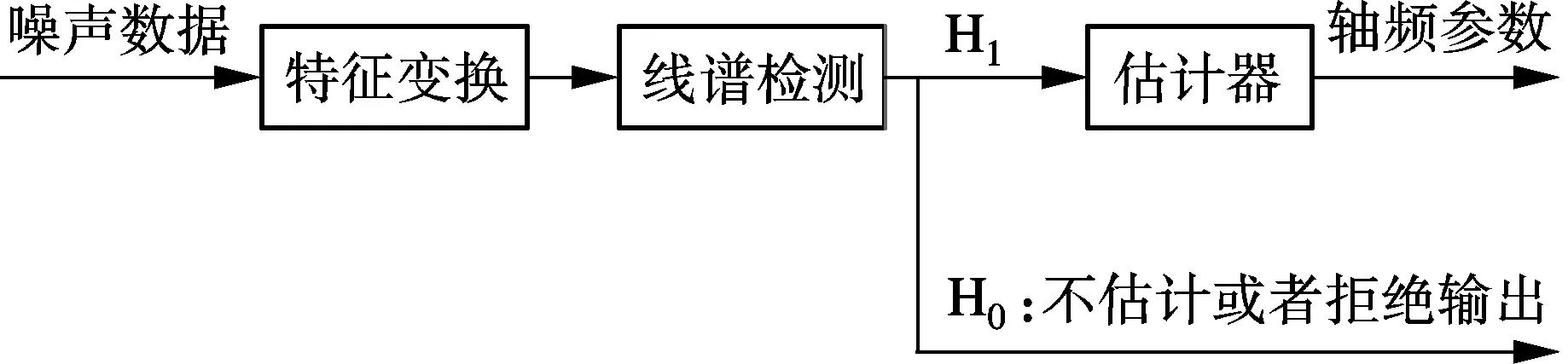
图2 现有的DEMON线谱检测与轴频估计
由图2可见,DEMON处理流程为顺序结构,特征变换、线谱检测和轴频估计均利用上一级的输出结果.各个模块处理时并不能利用后续处理得到的信息.JDEMON处理则在DEMON处理流程中引入一个信息反馈机制,以期改善DEMON处理的总体性能.
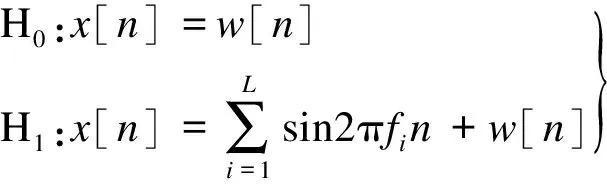
记被检验的假设为:零假设H0和备择假设H1,其中H0代表该频点只有噪声,H1代表该频点有线谱.
(3)

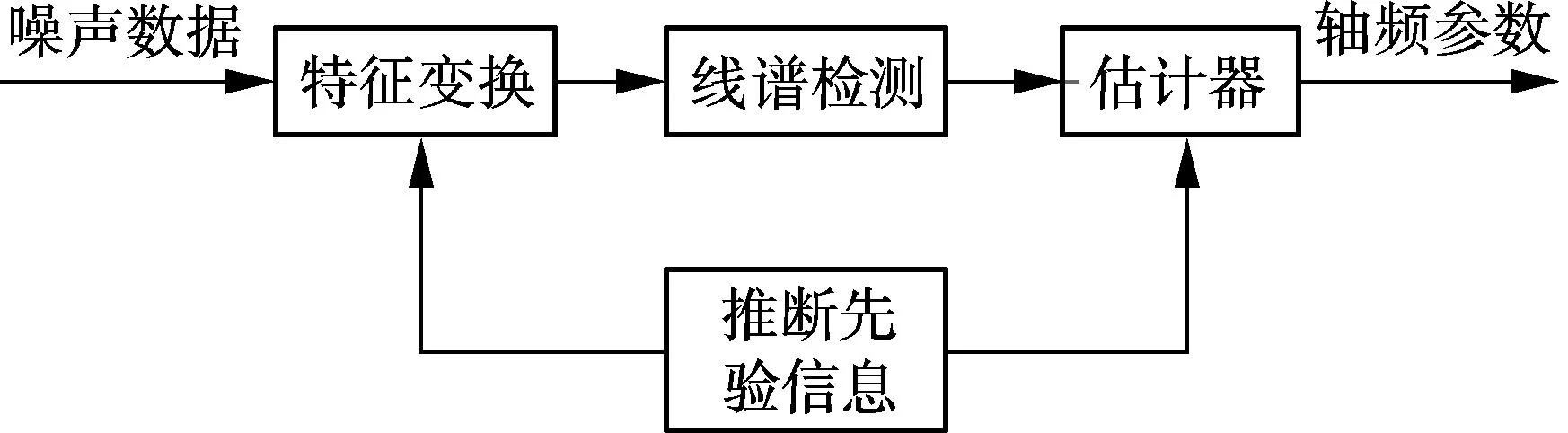
图3 JDEMON线谱检测与轴频估计

3 JDEMON线谱检测及轴频估计算法
JDEMON线谱检测利用谐波检测算法,即
(4)
式中,谐波频率f=[f1,f2,…,fL]∈Θ为未知参量,且服从先验分布π(f);L称为谐波阶数,亦是未知的,假设L≤P且P已知.通过一组观测X推断信号的阶数L并估计其频率f=[f1,f2,…,fL]时,问题可转化为一个P+1元复合假设检验问题:

(5)
当给定某一假设Hm(m=0,1,…,P)和频率f时,观测X的条件PDF为
(6)
根据Bayes理论,定义复合似然比如下:
(7)
在计算出假设Hm的复合似然比后,其相应后验概率为
(8)
可以根据最大后验(MAP)准则,取后验最大的假设Hm作为检测器的判决结果,即
(9)
然后在该假设下进行频率估计.
实际上,谐波信号中信号的初相位和各次谐波的幅度是未知的.考虑这2个因素,观测的条件PDF改写为
(10)
可以得到ML估计为
J(A,f,φ)=

(11)
参照周期图谱估计,构建谐波检测统计量:
(12)

② 对观测数据X的包络检波数据取Nk点进行功率谱分析,得到每个频点功率谱估计hi,i=0,1,…,此时谱的分辨率为Δfk.
③ 对轴频分布区间内每一频点,计算轴频统计量,即

⑥ 当迭代到一定次数或轴频估计趋于稳定时,依据MAP准则,取后验概率P(Hm|X)最大的假设Hm为检测器的输出.
上述过程中,先验信息指的仅是先验分布π(f).然而先验概率P(Hm)对后验概率P(Hm|X)亦有很大的影响,在更完整的校正准则中应该考虑到.
4 实验数据分析
首先对仿真数据进行处理.其中数据采样率为10 kHz,信号调制频率为3.04,6.08,9.12,12.16 Hz,调制深度分布为0.2,0.2,0.3,0.3.宽带载频信号和噪声均为高斯白噪声,信噪比为-12 dB.处理结果如图4所示.由图可见,JDEMON谱中轴频线谱及谐波线谱得到明显的加强,轴频统计量的峰值也有所增强.
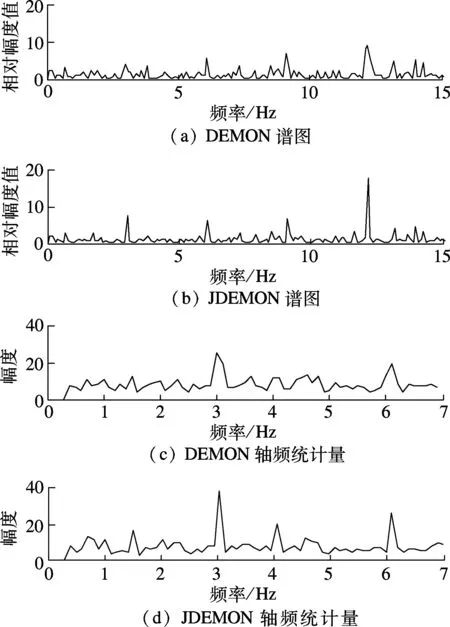
图4 仿真数据的解调谱和轴频统计量曲线
DEMON处理和JDEMON处理得到的轴频统计量峰值频率分别为3.00和3.04 Hz,幅度为33.61和44.42.处理得到的轴频及其前4次谐波的频率和幅度值如表1所示.可见,在仿真数据处理中,JDEMON处理方法提高了轴频估计的精度,并提升了轴频检测统计量的峰值.
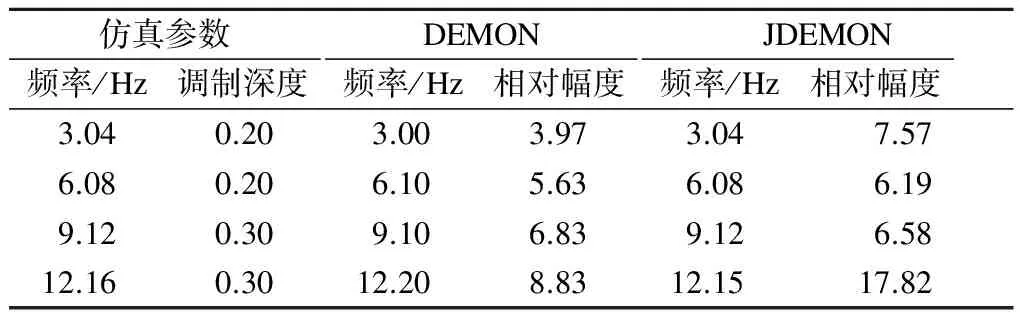
表1 仿真数据的轴频及谐波相对幅值
采用蒙特卡罗模拟轴频处的线谱检测性能,检测器的ROC曲线如图5所示.由图可见,采用JDEMON处理方法后,轴频处的线谱检测性能得到了提升.
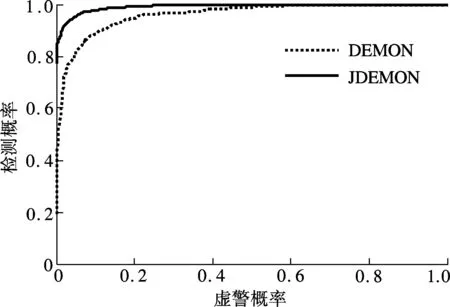
图5 轴频处线谱检测器ROC曲线
为了获取较为纯净的实际螺旋桨噪声数据,开展了一次水池实验,实验装置如图6所示.实验过程中,螺旋桨轴被安放在水面以下30 cm处,并在螺旋桨轴下方2 m处安放水听器,用于采集和记录螺旋桨噪声.螺旋桨采用了四叶侧斜桨,螺旋桨和驱动装置如图7和图8所示.
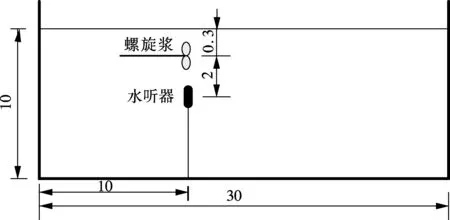
图6 水池实验示意图(单位:m)

图7 四叶螺旋桨

图8 螺旋桨的驱动和测试装置
实验中,螺旋桨以200 r/min的速度旋转.对采集的数据进行DEMON和JDEMON分析,结果如图9所示.
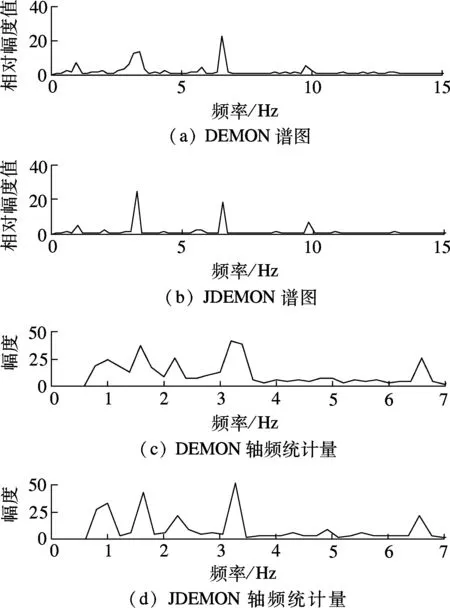
图9 实测数据的解调谱和轴频统计量曲线
DEMON处理和JDEMON处理得到的轴频统计量峰值频率分别为3.40和3.29 Hz,幅度为33.09和46.98.处理得到的轴频及其前4次谐波的频率和幅度值如表2所示.可见,在实测数据处理中,JDEMON处理方法提高了轴频估计的精度,并提升了轴频检测统计量的峰值.
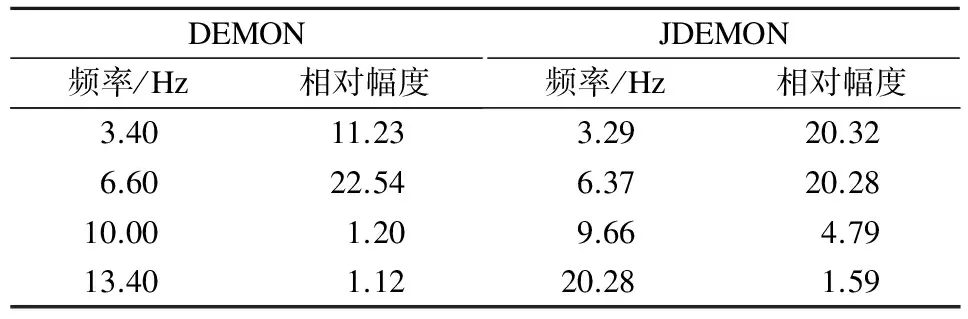
表2 实测数据的轴频及谐波相对幅值
5 结语
本文针对利用螺旋桨辐射噪声提取目标轴频信息的需求,提出了基于联合检测和估计的JDEMON方法.该方法在传统的DEMON处理中,构建了DEMON谱中谐波检测的统计量,引入了检测器和估计器之间的耦合机制,通过迭代处理相互交换信息以提高检测和估计性能.对仿真信号和实际水声信号数据的分析统计表明,JDEMON算法可有效地提高传统DEMON估计的线谱检测概率和轴频估计精度.但是该方法目前还存在计算量较大、迭代收敛速度不快的局限性,有待进一步研究和探讨.
)
[1] Lourens J G, du Preez J A. Passive sonar ML estimator for ship propeller speed[J].IEEEJournalofOceanicEngineering, 1998,23(4):448-453.
[2] Nielsen R O. Cramer-Rao lower bounds for sonar broad-band modulation parameters[J].IEEEJournalofOceanicEngineering, 1999,24(3):285-290.
[3] Bao Fei, Wang Xinlong, Tao Zhiyong, et al. Adaptive extraction of modulation for cavitation noise[J].JournaloftheAcousticalSocietyofAmerica, 2009,126(6):3106-3113.
[4] 罗昕炜,方世良. 基于HHT的宽带非平稳调制信号的特征提取[J]. 信号处理, 2011, 27(6):950-955.
Luo Xinwei, Fang Shiliang. Feature extraction from non-stationary amplitude modulated broad-band signal using the Hilbert-Huang transform[J].SignalProcessing, 2011,27(6):950-955. (in Chinese)
[5] 李启虎,李敏,杨秀庭. 水下目标辐射噪声中单频信号分量的检测:理论分析[J]. 声学学报,2008, 33(3):193-196.
Li Qihu, Li Min, Yang Xiuting. The detection of single frequency component of underwater radiated noise of target:theoretical analysis[J].ActaAcoustica, 2008,33(3):193-196.(in Chinese)
[6] 李启虎,李敏,杨秀庭. 水下目标辐射噪声中单频信号分量的检测:数值仿真[J]. 声学学报, 2008, 33(4):289-293.
Li Qihu, Li Min, Yang Xiuting. The detection of single frequency component of underwater radiated noise of target:digital simulation[J].ActaAcoustica, 2008,33(4):289-293.(in Chinese)
[7] 冯源, 陶然,卓智海. 螺旋桨加速状态下空化噪声的调制特性与分析方法[J]. 北京理工大学学报, 2011,31(2):177-181.
Feng Yuan, Tao Ran, Zhuo Zhihai. The modulation characteristics and analysis method of propeller cavitation noise during accelerating procedure[J].TransactionsofBeijingInstituteofTechnology, 2011,31(2):177-181.(in Chinese)
[8] 梅璐璐,林京,季桂花,等. 基于相移小波的信号包络提取方法研究[J]. 仪器仪表学报,2007, 28(6):1122-1128.
Mei Lulu, Lin Jing, Ji Guihua, et al. Envelope extraction based on phase-shifting wavelet method[J].ChineseJournalofScientificInstrument, 2007,28(6):1122-1128.(in Chinese)
[9] 史广智,胡均川,笪良龙. 基于模型匹配的舰船螺旋桨噪声特征精细分析[J]. 声学学报, 2009, 34(5): 401-407.
Shi Guangzhi, Hu Junchuan, Da Lianglong. Feature fine analysis of noise radiated from ship propeller based on model matching[J].ActaAcoustica, 2009,34(5):401-407.(in Chinese)
[10] 朱志峰, 方世良, 王晓燕. 船舶螺旋桨黏性空化流场数值模拟方法[J]. 东南大学学报:自然科学版, 2010,40(6): 1146-1151.
Zhu Zhifeng, Fang Shiliang, Wang Xiaoyan. Numerical method for viscous cavitating flow around ship propeller[J].JournalofSoutheastUniversity:NaturalScienceEdition, 2010,40(6):1146-1151. (in Chinese)
[11] Antoni J, Hanson D. Detection of surface ships from interception of cyclostationary signature with the cyclic modulation coherence[J].IEEEJournalofOceanicEngineering, 2012,37(3):478-493.
