“北斗”卫星导航系统空间信号接口控制文件 解读
2013-12-25徐菁北京空间科技信息研究所
徐菁(北京空间科技信息研究所)
“北斗”卫星导航系统采取“三步走”的发展步骤:第一步,“北斗”卫星导航试验系统;第二步,“北斗”卫星导航系统区域服务;第三步,2020年左右全面建成“北斗”卫星导航系统,形成全球服务能力。目前,“北斗”区域卫星导航系统星座拥有14颗卫星在轨运行,包括5颗地球静止轨道(GEO)卫星、5颗倾斜地球同步轨道(IGSO)卫星和4颗中圆地球轨道(MEO)卫星,为亚太区域用户提供4种以上导航信号连续覆盖。为此,中国卫星导航系统管理办公室正式发布了“北斗”卫星导航系统空间信号接口控制文件(ICD)—公开服务信号B1I(1.0版),以鼓励国内外相关企业参与“北斗”应用终端研发,推动“北斗”广泛应用。
1 引言
“北斗”卫星导航系统空间信号接口控制文件定义了“北斗”系统空间星座和用户终端之间公开服务信号B1I的接口关系,明确了“北斗”系统空间星座组成、时间系统和坐标系统,规范了B1I信号结构、基本参数和测距码特征等相关内容,并重点阐述了导航电文格式、信息类别和播发特点,以及数据码的纠错编码方式、帧结构、结构编排、基本内容和计算方法等。本文主要针对该文件中所涉及的时间系统、坐标系统、导航信号特征和导航电文格式等内容进行详细解读,并与美国的“全球定位系统”(GPS)和俄罗斯的“全球导航卫星系统”(GLONASS)进行对比分析研究。
2 时间系统
时间的概念与内涵
时间包含2个基本概念:时刻和时间间隔。所谓时刻,是指发生某一现象或事件的瞬间;所谓时间间隔,是指发生某一现象或事件所经历的过程,在数值上等于该事件发生过程的起止时刻之差。在天文学和卫星导航应用中,把记录某一事件发生的时刻称为历元;把用于时间间隔测量或计量的单位称为时间尺度;把计量时刻的起始点称为时间原点,或初始历元。时间系统是由时间原点和时间尺度构成的,其中时间尺度是建立时间基准的关键,而时间原点可以根据实际应用加以选定。建立与维持卫星导航系统的核心任务就是实现导航星座与地面运控之间,以及用户终端与导航星座之间的时间同步,构建统一的时间基准系统。常用的时间系统可以分为如下3种类型:
1)世界时系统。它是以地球自转运动为基准而建立的时间系统。根据观测地球自转运动时所选择空间参考点的不同,世界时系统又分为恒星时、真太阳时、平太阳时和世界时等。
2)历书时系统。它是以地球公转运动为依据而建立的时间系统。以经典牛顿力学为基础建立的太阳系天体运动理论,其数学上的时间为均匀的自变量,称为牛顿时。考虑到天体运动理论模型误差和运动微分方程的积分常数误差,利用任何一个天体位置历表只能给出近似的牛顿时,通常把这种由天体位置历表给出的时间称为历书时。
3)原子时系统。它是以物质内部原子运动特征为基准而建立的时间系统。将分布在世界各国实验室的多台原子时钟进行相互比对,并经数据处理推算出全球统一的原子时系统时间,称为国际原子时(TAI)。为了避免播发的原子时与世界时之间产生过大的偏差,一种以原子时秒长为基准,在时刻上尽量接近于世界时的一种折衷的时间系统,称为协调世界时(UTC)。
协调世界时的秒长严格等于原子时的秒长,采用跳秒(或闰秒)的办法使协调时与世界时的时刻相接近。当协调时与世界时的时刻之差超过0.9s时,就在协调时中引入一个闰秒(正的或负的),闰秒一般在每年6月30日或12月31日末加入。协调时除引入闰秒外,其本质上就是原子时,因此协调时的建立、测量和比对与原子时基本相同。目前,世界上约有45个实验室建立了协调时系统。根据国际约定,各个时频实验室的协调时用UTC(k)表示,其中k表示各实验室的缩写符号。
卫星导航时间系统
卫星导航时间系统属于原子时系统,目前已建成的“北斗”、GPS和GLONASS时间系统均以国际原子时秒长为时间尺度,但在时间原点定义和维持方式存在差异。
1)“北斗”时间系统。它是以中国国家授时中心(NTSC)的UTC(NTSC)时间为基准,通过“北斗”地面运控系统的原子时钟组来实现的时间系统。利用“北斗”时间系统授时的时间,称为“北斗”时间(BDT)。BDT是以2006年1月1日0时的UTC(NTSC)为时间原点,以国际原子时秒长为时间尺度,采用周和周内秒计数无跳秒连续计时。BDT通过UTC(NTSC)与国际UTC建立联系,BDT与UTC(NTSC)的时差控制准确度小于100ns(模1s)。

“北斗”导航卫星进行总装
2)GPS时间系统。它是以美国海军天文台(USNO)的UTC(USNO)时间为基准,通过GPS地面控制站的原子时钟组来实现的时间系统。利用GPS时间系统授时的时间,称为GPS时间(GPST)。GPS时间系统的时间原点是1980年1月6日0时的UTC(USNO),时间尺度为国际原子时秒长,是一个没有跳秒的连续计时系统,以GPS周和周内累计秒数表示。除存在整秒的跳秒差外,GPS地面控制站使GPST与UTC(USNO)之间的系统差保持在1μs的范围内。
3)GLONASS时间系统。它是以俄罗斯物理和无线电测量科学院(SU)的UTC(SU)时间为基准,通过GLONASS地面控制站的原子时钟组来实现的时间系统。利用GLONASS时间系统授时的时间,称为GLONASS时间(GLST)。GLONASS时间系统是一个具有同步跳秒的时间系统,GLST与UTC(SU)之间具有3h和小于1μs的系统差,但不存在跳秒差。
3 坐标系统
协议地球参考系及参考框架
理想的地球参考系是指一种相对于地球只存在变形,不存在整体旋转和平移,而相对于惯性参考系只包含地球的整体运动(地球的轨道运动和自转)的参考系统。由地球表面一系列观测站构成的物理实体框架是理想地球参考系的最好近似和具体化形式。考虑到地极移动使地球坐标系的指向发生变化,将对实际工作带来诸多不便。为此,国际天文联合会与大地测量协会(IAU/IAG)决议:以1900-1905年间的平均纬度所确定的平均地极位置作为基准原点,并以此期间地球自转轴在地球表面上的平均位置作为平极,称为协议地球极(CTP)。利用协议地极为基准点而建立的地球坐标系,称为协议地球参考系。
国际地球参考系(ITRS)是目前国际上公认的具有最高精度和稳定性的协议地球参考系,其基本定义为:
1)坐标原点位于整个地球质量中心,整个地球质量包括固体地球、海洋和大气的质量总和;
2)坐标尺度采用国际单位制中定义的米的长度,是一个定义在广义相对论意义下的局部地球参考框架内的尺度;
3)坐标系定向与国际时间局(BIH)1984.0历元的CTP和零子午线相一致;
4)定向参数的时间演化相对于地壳不产生残余的全球性旋转,即参考系相对于整个地球的板块水平运动来说,不存在整体性的残余旋转。
国际地球参考框架(ITRF)是ITRS的具体实现形式,是由一组固定于地球表面而且只作线运动的大地点的坐标及其变化率组成的。
卫星导航坐标系统
卫星导航坐标系统属于协议地球参考系,通过布设在地面具有三维地心坐标的大地控制点构成的参考框架来具体实现。“北斗”系统采用2000中国大地坐标系(CGCS2000),其坐标原点位于地球质心;Z轴指向国际地球自转服务组织(IERS)定义的参考极(IRP)方向;X轴指向IERS定义的参考子午面与通过原点且同Z轴正交的赤道的交点;Y轴与X轴和Z轴构成右手坐标系。GPS系统采用1984世界大地坐标系统(WGS-84),其坐标原点位于地球质心,Z轴指向BIH1984.0定义的CTP;X轴指向BIH1984.0定义的零子午面与CTP相应的赤道交点;Y轴与X轴和Z轴构成右手坐标系。GLONASS系统采用1990地球参数(PZ-90)坐标系,其坐标原点位于地球质心;Z轴指向IERS推荐的CTP;X轴指向地球赤道面与BIH定义的零子午线的交点;Y轴与X轴和Z轴构成右手坐标系。CGCS2000、WGS-84和PZ-90坐标系的原点为相应的参考椭球几何中心,Z轴为参考椭球的旋转轴。
4 导航信号特征
通常,卫星导航信号是由3种信号分量构成的,包括载波频率信号、测距码信号和导航数据码信号(D)。其中,载波频率是由卫星基准时钟频率按一定的比例关系控制而产生的;测距码是一种高速率的伪随机噪声序列;导航数据码是一种低速率的信号码,用来传送卫星星历、卫星时钟修正参数、卫星工作状态、遥测信号、时间系统参数、群延迟改正参数和完好性信息等导航数据。依据服务对象和方式的不同,卫星导航信号又分为授权服务信号和公开服务信号。
“北斗”卫星导航信号
“北斗”卫星在多个载波频率上调制多路信号,采取授权和公开两种方式提供服务,满足各类用户实际应用需求。依据此次公布的ICD文件公开服务信号内容,B1载波频率为1561.098MHz,采用正交相移键控(QPSK)调制方式,在I、Q两个支路上调制测距码和导航电文信号。B1I支路信号测距码由两个11级线性移位寄存器G1和G2生成序列,并进行模二加产生平衡Gold码后截短1码片而得到的,其速率和码长分别为2.046×106码片/秒、2046码元。导航信号采用码分多址(CDMA)的信号复用方式,以识别星座的卫星信号。
GPS卫星导航信号
GPS卫星在L1(1575.42 M H z)、L2(1227.60MHz)和L5(1176.45MHz)载波频率上调制测距码和导航数据码信号。对于GPS-1、2、2A和2R卫星系列,采用二相移键控(BPSK)调制方式,在载波频率L1上调制了测距码信号C/A和P1,以及数据码信号D;在载波频率L2上调制了测距码信号P1和数据码信号D。C/A码是由2个具有相同码位长度(10级移位寄存器)和速率,但具有不同结构的m序列优选对G1和G2码模二加而产生的Gold码族序列,长度为1023码元,重复周期为1ms;P码是由4个12级移位寄存器的m序列进行异或计算而产生的截短码序列,其长度为6.1871×1012码元,重复周期为7天。采用码分多址(CDMA)技术,区分不同的卫星信号并检测出来。
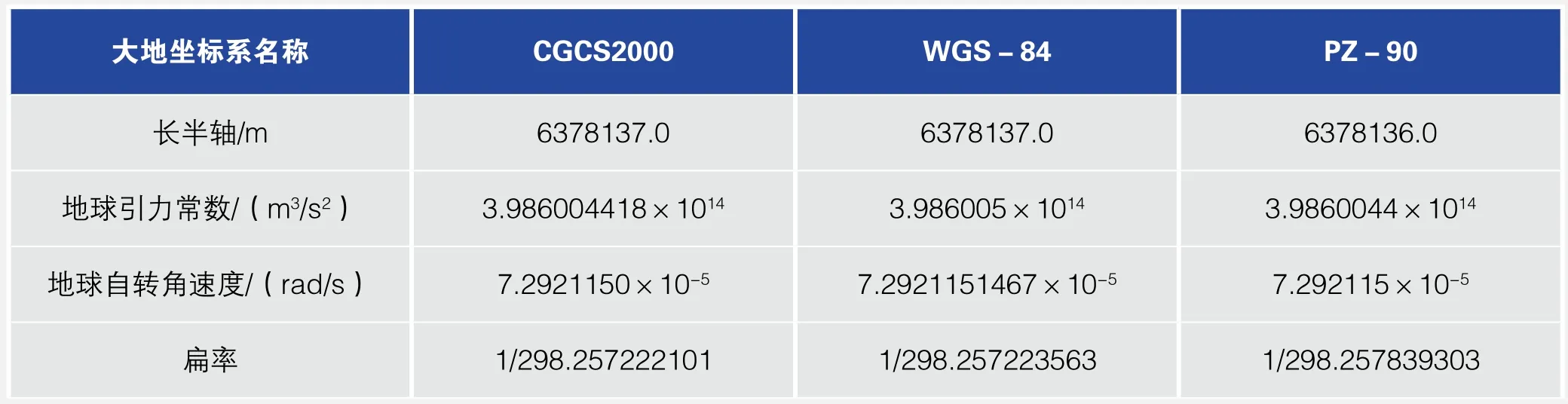
CGCS2000、WGS-84和PZ-90坐标系采用的参考椭球基本常数
GPS-2RM卫星之后,在L2频率上调制民用测距码(L2C),并在L1和L2频率上,采用二进制偏置载波(BOC)调制方式,调制新的军用M码。L2C码是由两个不同长度的伪随机码相乘而产生的,码速率仍为1.023MHz;M码比P码具有较强的信号发射功率、抗干扰能力和保密性能,有利于军用接收机直接捕获信号。GPS-2F卫星之后,增加民用频率L5。L5民用测距码由两个长度均为10230码元的伪随机码组合而成,速率为1.023 MHz,采用QPSK调制方式,并带有速率为50bit/s的数据信息。
GLONASS卫星导航信号
GLONASS采用频分多址(FDMA)方式区分卫星,各卫星使用不同的频率发射信号,在G1(1602.00MHz)和G2(1246.00MHz)两个频率链路上各分配了12个频率通道,其频率增量分别为0.5625MHz和0.4375MHz。采用BPSK调制方式,在两个频率链路上调制标准测距码C、精密测距码P和导航数据码D。其中,C码长度为511码元,码速率为0.511×106码片/秒;P码长度为5110000码元,码速率为5.11×106码片/秒。
5 导航电文格式
卫星导航电文,即为导航数据码,主要为用户提供卫星轨道及钟差参数、健康状况和星座卫星历书等信息,是用户进行导航定位计算的基本参数。导航电文的码速率远低于测距码,通过测距码进行扩频,再调制到载波频率上播发至用户终端。在导航电文的内容、分类、编排格式和计算方法上,不同的卫星导航系统之间存在差异。
“北斗”卫星导航电文
根据码速率和结构的不同,“北斗”卫星导航电文分为两类:一类是D1导航电文,速率为50bit/s,并调制有速率为1kbit/s的二次编码,其内容包括本星基本导航信息、星座全部卫星历书信息以及与其他系统时间同步信息,在MEO和IGSO卫星的B1I信号上播发;另一类是D2导航电文,速率为500bit/s,其内容包括“北斗”卫星导航系统差分信息、完好性信息和格网点电离层校正信息等,在GEO卫星的B1I信号上播发。“北斗”系统是采用开普勒轨道根数的形式播发导航星历及摄动拟合参数,并根据开普勒轨道方程,计算“北斗”卫星在CGCS2000坐标系中的瞬时位置。
D1导航电文由超帧、主帧和子帧组成。每个超帧为36000bit,由24个主帧组成(24个页面),历时12min;每个主帧为1500bit,由5个子帧组成,历时30s;每个子帧为300bit,由10个字组成,历时6s;每个字为30bit,由导航电文数据及校验码组成,历时0.6s。导航电文具体编排格式为:子帧1~3播发周内秒计数、整周计数、用户测距精度指数、卫星自主健康标识、电离层延迟模型改正参数、卫星星历参数及数据龄期、卫星钟差参数及数据龄期、以及星上设备时延差等本星基本导航信息;子帧4和子帧5的信息内容由24个页面分时发送,其中子帧4的页面1~24和子帧5的页面1~10播发星座全部卫星历书及与其他系统时间同步信息;子帧5的页面11~24为预留页面。
D2导航电文由超帧、主帧和子帧组成。每个超帧为180000bit,由120个主帧组成,历时6min;每个主帧为1500bit,由5个子帧组成,历时3s;每个子帧为300bit,由10个字组成,历时0.6s;每个字为30bit,由导航电文数据及校验码组成,历时0.06s。导航电文具体编排格式为:子帧1播发本星基本导航信息,由10个页面分时发送;子帧2~4播发“北斗”卫星导航系统完好性及差分信息,由6个页面分时发送;子帧5播发星座全部卫星历书、格网点电离层信息及与其他系统时间同步信息,由120个页面分时发送。其中,子帧1的页面1~10的低150bit信息,子帧4的页面1~6,以及子帧5的页面14~34、页面74~94和页面103~120为预留信息。
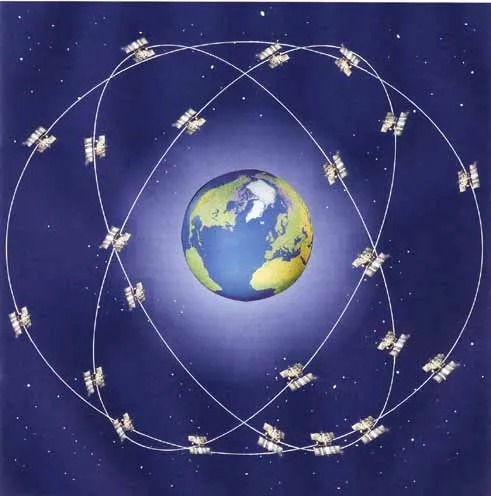
俄罗斯GLONASS导航星座示意图
GPS卫星导航电文
GPS卫星导航电文依据规定的格式构成主帧,并以50bit/s的速率发送给用户。每个主帧有1500bit的数据,并分成5个子帧,每个子帧有10个字,每个字30bit。各子帧的第1个字均为遥测字,以此作为捕获导航电文的前导同步信号;第2个字为握手字,用于捕获P码的Z计数;5个子帧的其余字构成3个数据块。其中,第Ⅰ数据块包括卫星钟差参数、GPS周数、卫星工作状态、卫星时钟数据参考历元、卫星时钟数据龄期和设备延迟参数等信息,位于第1子帧;第Ⅱ数据块向用户提供卫星运行参数,即卫星星历,用于计算GPS卫星的瞬时位置及速度,位于第2、3子帧;第Ⅲ数据块主要包括卫星历书、电离层延迟改正参数和UTC时间改正参数等信息,位于第4、5子帧。记载全部卫星的历书多达25页,需要12.5min才能传输完毕。
GPS系统是以开普勒轨道根数的形式播发导航星历,星历参数的时间间隔2h;依据开普勒轨道方程,并加入卫星摄动拟合参数,计算GPS卫星在WGS-84坐标系中的瞬时位置。
GLONASS卫星导航电文
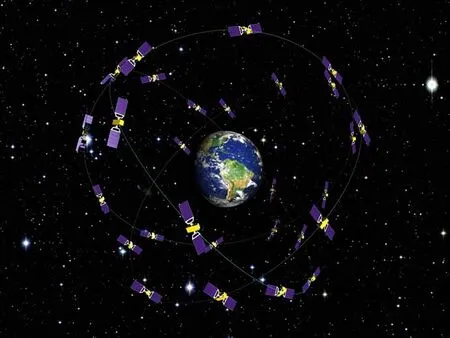
美国GPS导航星座示意图
GLONASS卫星在标准测距码和精密测距码上分别调制了2种不同的导航电文。在标准测距码上调制了1个超帧的导航电文数据,1个超帧包含5个帧,每帧历时30s;1个帧包含15串,1个串为100bit;1个串由导航数据和时间标识组成。第1~5串为本星的星历数据、帧头对应的时间标识、卫星健康标识、钟差参数和载波频率与标准值的偏差;第6~15串为星座全部卫星的历书信息。在精密测距码上调制的导航电文数据较长,其1个超帧包含72帧,1个帧包含5个串,1个串为100bit,1个超帧数据需要12min才能传输完毕。
GLONASS系统是直接给出参考历元的卫星位置、速度及日月对卫星的摄动加速度,星历参数的时间间隔为30min;通常用4阶的龙格-库塔法进行数值积分,得到GLONASS卫星在PZ-90坐标系中的瞬时位置。
6 结束语
卫星导航系统是国家空间基础设施,是继移动通信和互联网之后,推动全球经济发展的巨大战略性新兴产业,正在给世界政治、军事、科技带来革命性的变化。ICD文件是研制导航用户终端及芯片所必备的技术文件,而时间系统、坐标系统、导航信号特征和导航电文格式是ICD文件的核心内容,本文在解读该文件相关技术概念和内涵的基础上,通过对比分析“北斗”与GPS和GLONASS的差异,加深了对ICD文件的认识和理解。“北斗”ICD文件B1I信号1.0版的正式发布,必将加速推进“北斗”系统应用产业化,带动相关行业快速发展。
