宽幅扫描仪中高边缘色彩重合度效果的实现*
2013-12-22贾宏宇叶玉堂刘娟秀
贾宏宇,刘 霖 ,叶玉堂,刘娟秀,王 平
(电子科技大学光电信息学院,成都610054)
基于多线阵彩色CCD 的宽幅拼接型高精度一次成像扫描仪的研制一直是国内、外学者及产业界关注的重点领域,但因是属于光、机、电、软、算综合性极强的设备,所涉及到的研究难点包括精密压纸机构[1]、三线CCD 光学成像组件[2]、大容量工程图矢量转换[3]、高亮度高均匀性无频闪照明等诸多难题,迄今为止,全部关键核心技术仍然只被英国Colortrac、丹麦Contex、德国ROWE 等少数国外研究团队掌握,国内所使用的基于多线阵彩色CCD 的宽幅拼接型高精度一次成像扫描仪全部靠进口,迄今为止尚无成熟产品推向市场[3]。精密压纸机构配合光学成像组件高精度采图是其中的核心问题。目前,仍有国内外大量学者针对黑白线阵相机、高精度运动平台设计、彩色线阵相机平场矫正算法研究等方面的研究,只有少数应用[4-5]。其难点主要在于:多彩色线阵相机拼接而成的大容量图像处理困难,不同相机机械安装角度难以保持一致导致拼接效果不好,超长压纸机构很容易产生形变导致扫描过程中出现卡纸现象,控制驱动系统运动精度低导致图像质量不高,高速彩色线阵CCD 成像组件的研发难以取得实质性突破。
走纸控制驱动系统,受到系统应用环境和整机成本的限制,目前,大多数较低分辨率(400 DPI 以下)的宽幅扫描仪所采用的普通步进电机配合皮带进行传动的方式。这样的方式精度低,在低分辨率黑白扫描的场合能够满足应用,但是对于高分辨率彩色扫描仪应用,会成为限制整机性能提升的瓶颈。本文根据项目中自主设计制作的宽幅扫描仪,先分析可能限制扫描性能的原因,通过设计高精度步进电机驱动,选型合适的行星减速步进电机,改进原有平台,对比改进前后实际扫描效果,并通过MATLAB定量计算对比改进前后结果,确认使用本文改进方案对原系统扫描清晰度具有明显改进。
1 扫描件出现彩色边缘的原因分析
造成扫描件出现边缘的原因可能有很多。整个系统采用LED 频闪白光照明,橡胶轮带动走纸,光路通过前表面镀膜反射镜组成折返光路,射入线阵相机。
以未采用本文改善方案的扫描组件扫描出的彩色图像以及方案改善后的实际扫描彩色图像作为分析对象。未经改善方案采图如图1 所示。

图1 原始图片
造成色彩失真的可能原因有以下几点:
(1)纸张运动不均匀造成扫描有误;
(2)频闪光源闪烁造成影响相机曝光;
(3)反射镜对不同波长光反射情况不同。
频闪光源采用高频直接开关式真彩色设计,设计频闪频率9 kHz,远高于扫描曝光行频,不成倍数关系,不会由于曝光对扫描图像造成影响。反射镜对不同波长光反射情况不同,只可能出现在整体上的偏色,通过后期软件矫正能够解决,不会造成边缘出现彩边的现象。因此可以初步确定原因是由于纸张运动不均匀造成扫描有误。
多线阵彩色CCD 的宽幅拼接型高精度一次成像扫描仪内部采用多个三线阵彩色CCD 成像组件经过同步触发采图、图像拼接,形成宽幅扫描图[6-7]。三线阵CCD 元件的原理如图2 所示[7-9]。
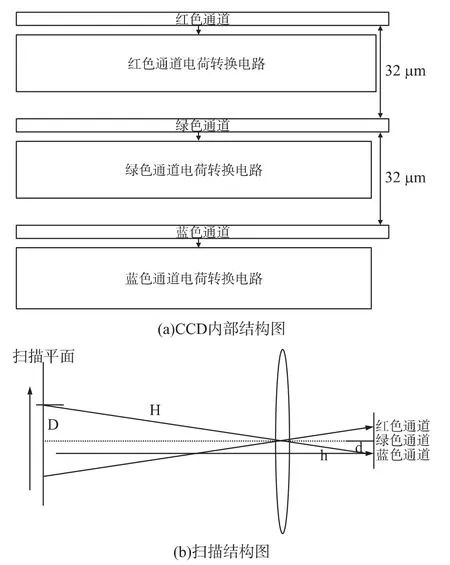
图2 三线阵CCD 元件的原理
本项目中,所使用的索尼公司的CCD,像元尺寸4 μm,不同通道的感光元件之间相差32 μm。针对这种结构,为了达到三色重合的目的,采用的处理方式通常有棱镜分光法、异步时钟控制曝光法、软件算法修正等[10]。针对大幅面相机在宽幅扫描仪中的实际应用需要,项目中采用了三通道数据分开缓存法来解决该问题,针对三色重合现象进行修正,理论上可以达到完美的采集效果。该方法的基本原理是通过对不同通道数据分别进行缓存,对相差8 行像素的数据重新组合成新的红、绿、蓝三色数据,得到新的图像[11]。本项目利用上述方法进行三色分离现象修正后,应用在CCD 彩色宽幅扫描仪中,存在扫描图像彩色边缘现象。彩色边缘不会影响低端应用需求,但是不能够满足高分辨率彩色扫描需求。
由于大幅面扫描仪中存在诸多小信号采集电路、高速数字信号处理电路,所以不适宜采用交流混合伺服电机[12]。国外同类产品中,也是使用自行研制的直流步进电机驱动电路驱动混合式步进电机,配合皮带、齿轮进行扫描件传动。混合式步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。当驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(即步进角)。可以通过控制脉冲个数来控制角位移量,从而达到定位的目的。由于是开环控制,所以必须要保证驱动电路高稳定性及转动电机高度平稳性,来保证扫描的高度准确性[13]。
设计光学分辨率为1 200 DPI,通过计算,可以得到单个像素对应物方距离为:

普通使用二相混合式步进电机的步进角为α=1.8°,扫描仪整机设计中电机齿轮m 与压纸机构齿轮n 齿数比为24 ∶30,即:m/m=24 ∶30,传动走纸橡胶轮的半径为r=0.8 cm,在图2 中,令不同颜色通道传感器距离为d,像距为h,物方对应间距为D,物距为H,由成像系统几何关系可以得到关系:

在不使用细分步进电机驱动器时,步进电机每动作一次,扫描件运动距离L 为:

代入数据,可以得到L=312 μm。
通过计算可以确定,使用传统大幅面扫描仪中二相混合式步进电机驱动器传动压纸机构,运动精度远远低于1 个像素的要求,考虑到转子会在运动一步过后附近做阻尼振动,实际抖动应该在15 个像素左右。当运动精度难以满足采集系统三通道数据分开缓存法进行三线采集颜色分离的矫正时,就会出现边缘出现彩色边缘的情况[14-15]。
根据上述分析计算,基本确定了造成图像边缘出现彩色边缘的产生原因。实际采集使用具有3 000 DPI 光绘机生成的光绘菲林片进行验证。使用高分辨率光绘菲林代替纸张来验证的好处是:高分辨率光绘菲林线由于生产工艺和菲林片本身的特性决定了线条边缘锐利,不会出现纸张印刷边缘模糊、毛糙的问题而造成验证结果不准确。如果运动速度在亚像素级是均匀的,可以看出扫描到的菲林片的斜线的边缘在每个通道都应该是一条直线,否则会呈现一定的锯齿状未经处理的采集图像如图3 所示。
从图中可以明显看出边缘出现彩色,分解红、绿、蓝三个通道可以看到明显锯齿状,通过Photoshop 观察出现边缘锯齿,可以发现周期为15像素左右,如图4 所示。
说明由于步进电机步进角过大已经明显影响到高精度图像采集要求。
在本系统中,需要设计带有细分的步进电机驱动电路。通常情况下,细分比高于一定值以后,只能够使电机每一次步进运动更平滑,但是难以保证在亚像素级运动精度[13]。本项目运动控制系统采用了16 细分电机驱动进行实验。
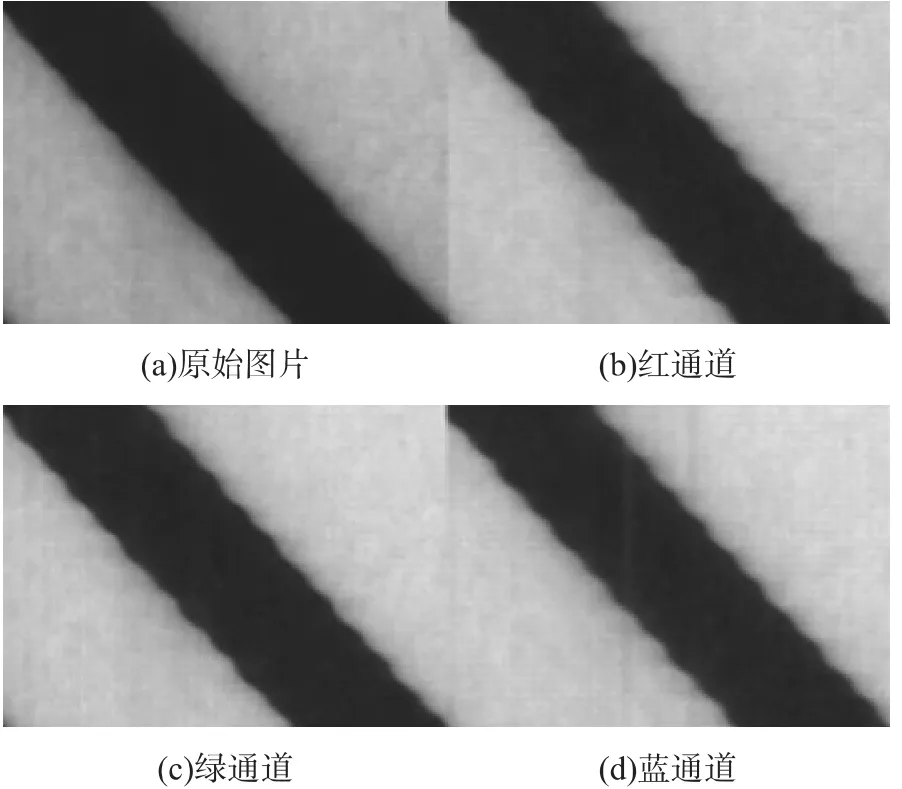
图3 未经处理的采集菲林片图像
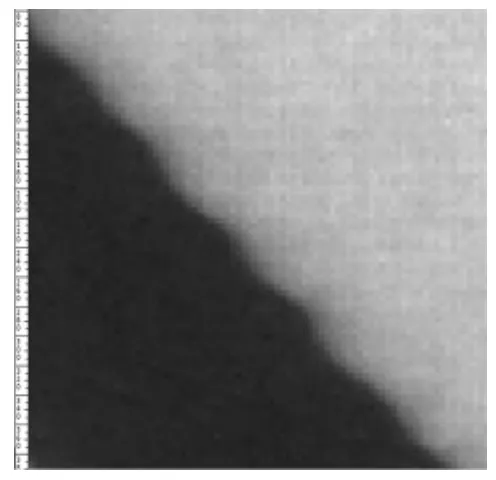
图4 边缘锯齿周期
2 实验结果与讨论
2.1 针对边缘彩色现象的分析结果提出改进方法
扫描仪分辨率高达1 200 DPI,单个像素为21 μm,如果电机每次步进产生的阻尼振动控制在1 个像素以内,并且使用16 细分电机驱动对振动进行平滑,即可以解决彩色边缘的现象,解决方法大致可以有以下几种。
(1)减小电机齿轮与压纸机构齿轮的齿数比
由上一章公式中可以得到,通过减小电机齿轮齿数、增大压纸机构齿轮齿数,可以使电机在相同转速下,压纸机构运动速度降低,进而减小电机由于单步步进引起的抖动对图像采集造成的影响。但是,难以将齿数比降低15 倍达到系统要求。
(2)使用高细分数步进电机驱动器或交流伺服电机
使用高度复杂的带有电流反馈交流伺服电机系统来代替现有的步进电机驱动系统,经过实验可以基本解决图像彩色边缘的问题,但是,交流伺服电机造成的较大的电磁干扰影响线阵相机微弱模拟信号处理。使用256 级高细分步进电机驱动器进行采图,虽然有一定改善,但仍然存在图像彩色边缘现象。
(3)降低采集图像光学分辨率
当分辨率降低至300 DPI 以下时,可以明显降低运动精度对采图的影响,但是这种方法不符合高分辨率大幅面扫描仪的设计要求,不能满足实际使用。
结合上述分析可知,在不降低图像采集分辨率的前提下,通过增大电机转速与实际压纸机构运动速度的比值,配合提高细分驱动器的细分数,可以达到改善图像彩色边缘的目的。针对这一分析结论,在本系统中,使用现有步进电机,配合15 ∶1高精度行星减速器,再通过改进步进电机驱动器,使转速提高15 倍的前提下,电机不出现掉步等现象。
2.2 进行改进后实验结果
扫描光绘菲林片上斜线,使用本文方法与使用高细分数步进电机驱动器改进前后的对比图,可以看出,本文提出的针对宽幅扫描仪解决彩色边缘的方法,对图像质量具有明显改善,如图5 所示。
为了看到更明显的效果,对两次扫描的图的相同部分使用MATLAB 进行去噪、二值化、提取边缘后,如图6 所示。
以两幅图上左上角为坐标原点,设离主对角线最近的一条边缘提取线条L1,L2上点坐标为(xi,yi),i=(0,1,…,350),单位为像素,在通过计算yi-xi可以得到组数据,即得到该线条相对于对角直线的相差值,并每隔15 个点进行一次方差计算,得出本文方法改进前后对扫描质量的对比结果。
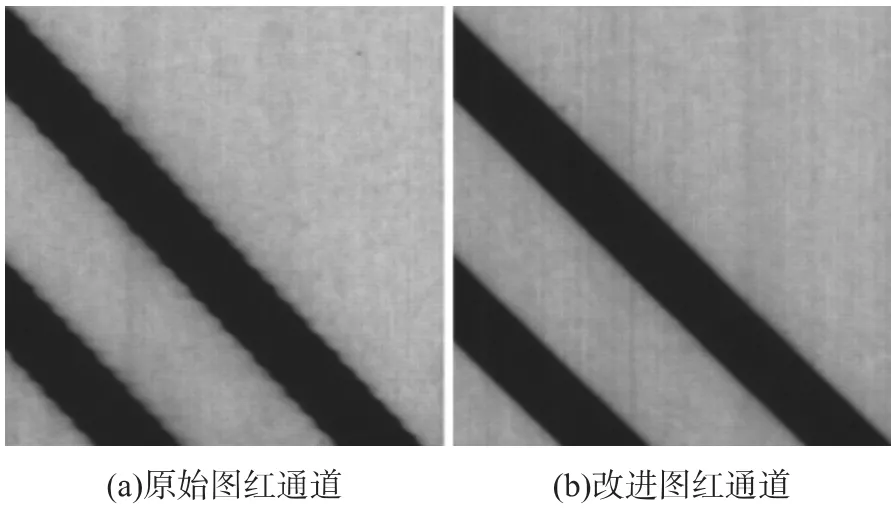
图5 扫描光绘菲林改进前后的对比图
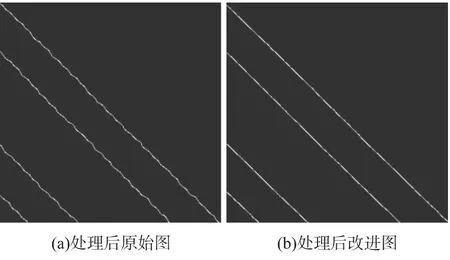
图6 经过处理的对比图
利用上述方法进行对比,表1 是随机不重复选取6 组原始图的计算结果(单位为像素)。表2 是在改进图中选取6 组和原始图选取点接近位置的结果进行对比(单位为像素)。
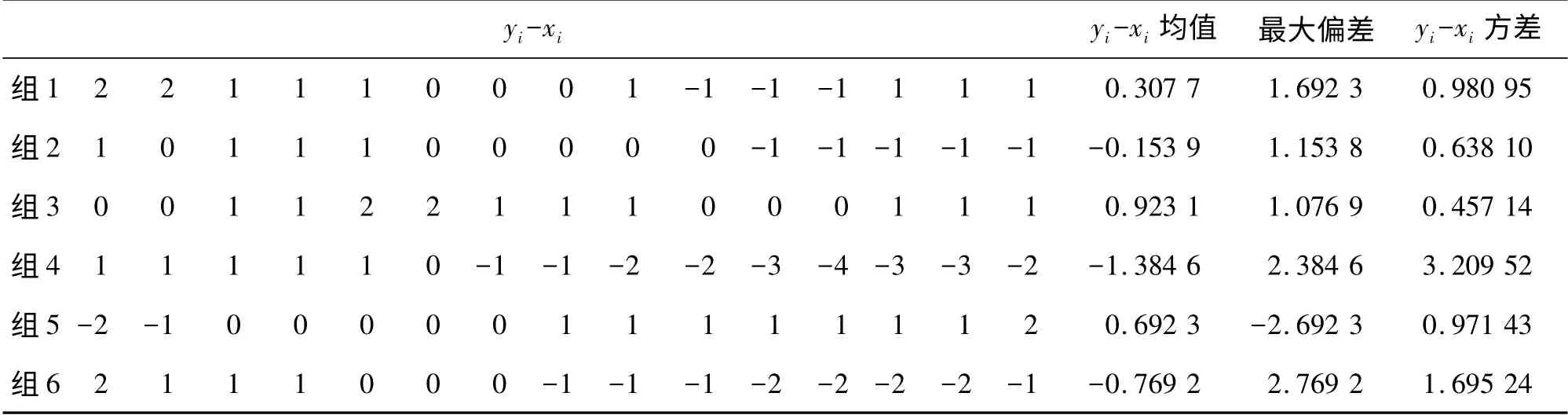
表1 原始图结果
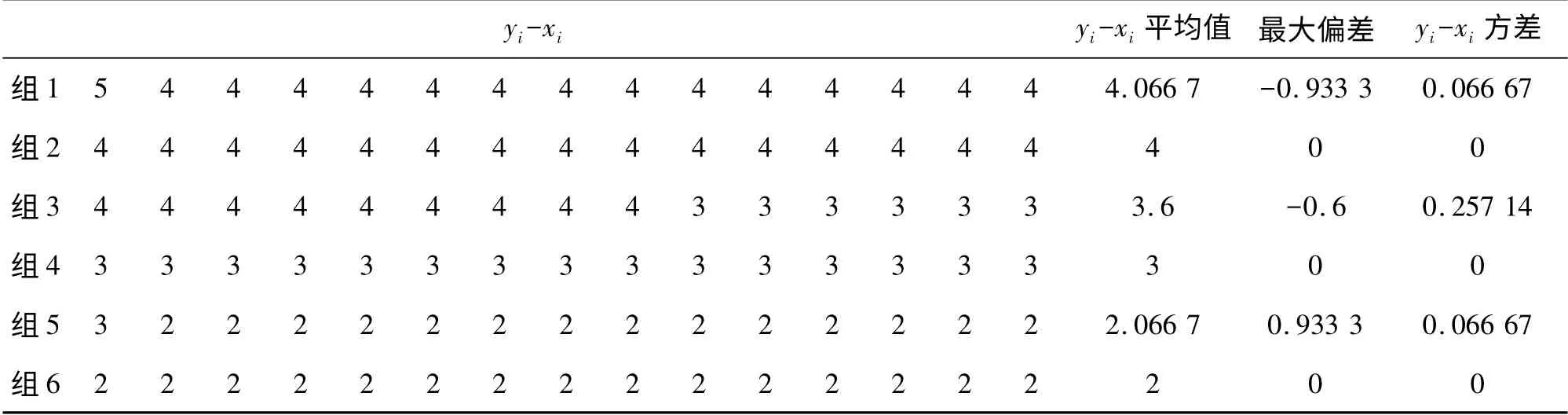
表2 改进图结果
通过表1 和表2 可以对比,可以看出,原始扫描图最大偏差接近+3/-3,改善后最大偏差+1/-1,考虑扫描的是斜线,所以原始扫描图实际最大偏差略小于+3/-3。计算样本方差来衡量多数点偏离直线的情况,可以看出,改进后样本方差明显变小,说明改善效果明显。
工程图纸及其他彩色文档使用CCD 宽幅扫描仪进行扫描中,与较低端的CIS 产品相比较,主要是对图像色彩还原度要求更高,边缘的锐利、清晰程度要求也更高。CCD 成像技术发展到现在,虽然没有达到非常精确,完美的程度,本文所述的方法正是针对在CCD 宽幅扫描仪中除去镜头像差影响的情况下,对图像边缘效果清晰度的明显改善。
2.3 大幅面扫描仪上应用的实际效果
使用本问所述方法进行改进解决边缘彩色边缘后,大幅面扫描仪扫描出的整体图像变得清晰,边缘变得更加锐利,图7 和图8 分别为改进前后扫描仪实际使用扫描图像。
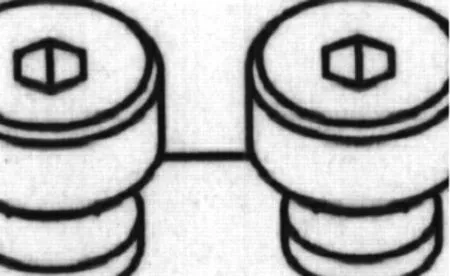
图7 改进前实际扫描图像
图8 改进后实际扫描图像
图9、图10 分别为宽幅扫描仪整机、机身内部高减速比行星减速器步进电机实际安装图。

图9 宽幅扫描仪整机
图10 机身内部实际安装图
3 结论
通过对宽幅扫描仪中多线阵彩色CCD 扫描产生彩色边缘的原因进行深入分析,并比较现有的扫描方式,提出了一种针对宽幅扫描仪中使用行星减速步进电机配合高细分比驱动电路的新设计,制作了国内第一台多线阵彩色CCD 大幅面扫描仪,解决了扫描图像彩色边缘的问题。
实验及测试结果表明:经过改善设计后的图像彩色边缘现象得到极大改善,在光学分辨率为1 200 DPI情况下,彩色边缘控制在+1/-1 像素。在以后的工作中,将对电机运行的平稳性进一步的优化处理,在保证图像质量的同时,能够实现更高速度的图像采集。
[1] Hyuck C,Garmire D,Demmel J,et al. Simple Fabrication Process for Self-Aligned,High-Performance Microscanners-Demonstrated Use to Generate a 2-D Ablation Pattern[J]. Microelectro Mechanical Systems,2007,16(2):260-268.
[2] 朱宏殷,郭永飞,司国良.多TDICCD 拼接相机成像非均匀性实时校正的硬件实现[J].光学精密工程,2011,12(19):3025-3041.Zhu H Y,Guo Y F,Si G L.Real-Time Correction of Image Nonuniformity for Multi-TDICCD Mosaic Camera on Hardware[J]. Opt.Precision Eng.,2011,12(19):3025-3041(in Chinese).
[3] Wang J H. A Topology Set Method for Vectorization[C]//Eighth ACIS International Conference on Software Engineering,IEEE,2007,1:229-234.
[4] 韩志冲,钟嫄,崔一平,等.单片机控制信号采集的软硬件设计及其在光源测量系统中的应用[J]. 电子器件,2008,31(2):643-645.
[5] 陈东明,叶玉堂,蒲亮,等.基于SOPC 可重构的图像采集与处理系统设计[J].电子器件,2011,34(2):233-236.
[6] Bhavsar A V,Rajagopalan A N. Range Map with Missing Data-Joint Resolution Enhancement and Inpainting[J]. 2008 Sixth Indian Conference on Computer Vision,Graphics& Image Processing,IEEE,2008:259-365.
[7] 方平,丁凡,李其朋,等.基于线阵CCD 的新型微位移传感器的研究[J].传感技术学报,2006,19(1):75-77.
[8] Zhou H,Ren J Y,Zhang X X,et al. Design of Imaging System Based on CCD in Field Readout Mode[J].Microcomputer Information,2009,16(32):151-155.
[9] Monoi M,Sasaki S,Dobashi K,et al. A Single-Layer CCD Image Sensor with Wide Gap Electrode and Gradual Potential Channel[C]//Society of Photo-Optical Instrumentation Engineers(SPIE)Conference Series,SPIE,2009,7247:12.
[10] 韩昌元.高分辨力空间相机的光学系统研究[J].光学精密工程,2008,16(11):2165-2172.Han C Y. Study on Optical System High Resolution Space Camera[J].Opt.Precision Eng.,2008,16(11):2165-2172(in Chinese).
[11] Florin T.Conversion from a Spectral Image to HDR Image[J].Proceedings of the SPIE—The International Society for Optical Engineering,SPIE,2009,7297:4.
[12] 闫峰,孙伟锋,夏晓娟,等. 单芯片高效率降压DC-DC 芯片设计[J].电子器件,2008,31(2):462-464.
[13] Reiss J,Alin F,Sandier M,et al.A Detailed Analysis of the Nonlinear Dynamics of the Electric Step Motor[J].Industrial Technology,2002.IEEE ICIT’02.2002 IEEE International Conference on,2002,12(2):1078-1083.
[14] 吕恒毅,刘杨,郭永飞.遥感相机焦面CCD 机械拼接中重叠像元数的确定[J].光学精密工程,2012,5(20):1042-1046.Lü H Y,Liu Y,Guo Y F.Computation of Overlapping Pixel of Mechanical Assembly CCD Focal Plane in Remote Sensing Cameras[J].Opt.Precision Eng.,2012,5(20):1042-1046(in Chinese).
[15] Hyung Soo Ohk,HyunSeok Seo,KiMin Kang,et al. A Restoration Method for Distorted Image Scanned from a Bound Book[C]//Proceedings of the SPIE—The International Society for Optical Engineering,SPIE,2011,7866:8.
