基于MEMS传感器的车辆防侧翻系统研究
2013-12-17张昊堃聂鹏鹏刘敏丰
张昊堃,聂鹏鹏,刘敏丰
(西安电子科技大学CAD研究所,陕西西安 710071)
随着我国车辆人均占有率的逐步提升,在汽车安全领域,各种安全措施日益受到人们关注。安全气囊、汽车防抱死系统等安全措施的广泛应用,对降低汽车碰撞及制动事故率有显著效果。但汽车的侧翻一直没受到重视。美国公路安全局的统计表明,在所有的交通事故中,汽车侧翻事故的危害程度仅次于汽车碰撞事故,居第二位。据统计,67%的车祸是由于弯道、地面路滑或紧急情况下突然猛打方向盘,使车辆发生侧翻造成的。国家标准GB7258-2004《机动车运行安全技术条件》中规定:最高时速高于20 km的车辆,整备质量、静态情况下最大侧倾稳定角应≥35°。汽车安全性能已成为众厂商博弈商场的杀手锏。因此,汽车防侧翻系统具有广泛的应用前景。
如果车辆能在发生侧翻前的0.51 s时间内给驾驶员提供预警信号,可以避免的侧翻事故约占侧翻事故总数的40%,侧翻事故将大幅减少。针对这一特点,车辆侧翻预警系统提前在车辆存在侧翻危险时进行报警。这样,驾驶员就有足够长的时间采取相应的措施抑制侧翻的发生。目前国外无论轿车、运动型汽车、货车等车型的侧翻动力学,还是静态、准静态和动态的计算机模拟都有深入的研究。近年来在车辆侧翻系统方面的主要预警技术以横向加速度和倾侧角作为侧翻性能指标。通过监测车辆横向加速度和倾侧角,侧翻预警系统可以大幅减少交通事故的发生。
1 系统总体设计方案
车辆防侧翻系统由4个模块构成:数据采集模块、中央数据处理单元以及侧翻报警单元。以中央数据处理单元为核心,在数据采集模块、侧翻报警单元的配合下,达到对车辆侧翻提前预警的目标。
数据采集模块基于微机电系统(Micro Electronic Mechanical System,MEMS)传感器而设计,能有效地提高车辆行驶的安全性。MEMS传感器技术具有体积小、重量轻、价格便宜等优点[1]。数据采集模块安装在车辆质心处,并以此作为车体平台坐标系,能实时地对汽车运动参数进行检测采集,同时将采集到的信息传递给中央数据处理单元。中央数据处理单元主要由基于ARM Cortex-M3内核的STM32F103RET6高性能嵌入式处理器构成,实现对传感器采集到的数据进行分析处理,通过预警算法,判断当前汽车是否有侧翻安全隐患。侧翻报警单元则在中央数据单元的控制下,通过蓝牙模块发出提醒信息,提醒司机减速或增大转弯半径减缓车辆倾斜的角度,防止汽车倾倒[2]。
2 数据采集及处理

图1 汽车防侧翻系统的系统结构图
汽车防侧翻系统通过微型传感器采集汽车运动参数,微型传感器包括加速度传感器LSM303DLHC以及陀螺仪L3GD20,他们分别测出加速度和角速度的大小。将陀螺仪测量的角速度积分来获得物体旋转的角度。将陀螺仪安装在模拟实验车辆质心上,通过对信号进行处理,获得角速度的信号输入[3]。
陀螺仪采用意法半导体(ST)的一款三轴数字陀螺仪L3GD20,这款陀螺仪的3个轴共用一个感应结构,从而消除了普通陀螺仪轴与轴之间的信号干扰,避免了输出信号受到干扰信号的影响。L3GD20的输出响应与相对于重力方向的关系如图2所示。L3GD20工作在I2C模式,与STM32F103RET6之间使用I2C接口连接,电路连接原理图如图6所示。其中,L3GD20的SDA与SCL分别为I2C总线的数据线和时钟线,与STM32的对应引脚连接。

加速度传感器采用意法半导体(STMicroelectronics)的LSM303DLHC,它是一款小而薄的超低功耗3轴加速度计,采用3 mm×5 mm×1 mm微型封装,分辨率高,测量范围达±16 g,最小功耗仅为110μA,可满足应用对尺寸和功耗的限制性要求,同时还具有出色的测量精度和性能。SDA和SCL分别为I2C总线的数据线和时钟线,与STM32F103RET6的对应引脚相连。汽车加速度可分解成3类:前向加速度(x轴);转向过程中离心作用下的向心加速(y轴);平路至上坡或平路至下坡过程中出现的单摆向心加速(z轴),如图4所示。以上3种加速运动均是车体平台坐标系3个轴向的其中一轴的加速运动。

3 侧翻预警算法
侧翻预警算法是计算车辆保持相同的状态行驶到车发生侧翻所需要的时间,在发生侧翻的前的第N秒钟预警,此时刻的侧翻预警时间为N s。也就是说如果司机不采取任何措施,在N s后车辆将发生侧翻。
设定车辆逆时针倾侧为正向,正向倾侧角为正。正向倾侧角阈值θt。车辆顺时针倾侧为反向,反向倾侧角为负θn;θt反向倾侧角阈值为为当前车辆的倾侧角,∅t为倾侧角速度。倾侧角速度∅t=θ't,倾侧角加速度∅'t,其中“'”表示导数。
侧翻预警上限时间X:假设X s内,车辆不发生侧翻,即认为车辆不发生侧翻,当预警时间t>X则预警器不用预警。
当θt≥θm,车辆当前倾侧角超过或等于阈值,认为车辆已经发生侧翻,预警时间为0。
当θt≤θm,当前车辆没有发生侧翻。根据国标GB7258 -2004 设定 θm=35°[4]。车辆以当前倾侧角运行到阈值的基于倾侧角加速度的时间计算公式如下
侧翻算法流程如图6所示。侧翻预警程序首先获取加速度、倾侧角、倾侧角速度值。如果车辆加速度小于零,则认为车辆静止,处于安全状态。如果加速度大于零,认为车辆行驶中,接着比较倾侧角与倾侧阈值,如果倾侧角大于倾侧阈值,则认为已经发生侧翻,预警时间值为0,如果倾侧角小于倾侧阈值则将倾侧角和倾侧角速度值代入式(2)和式(3)计算预警时间,最后将结果输出[5]。
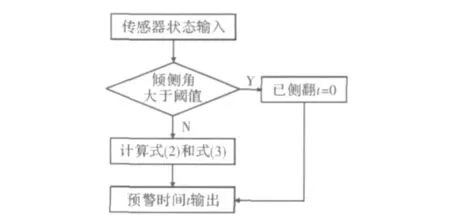
图6 预警算法流程图
4 软件流程
系统以Keil uVision4作为软件开发平台,Cortex-M3 STEVAL-MKI109V2为控制板,STM32单片机完成数据计算以及产生反馈信号。
系统上电后首先对STM32单片机初始化,然后设置端口参数,再配置中断。然后对传感器初始化,包括传感器芯片的初始化、陀螺仪中点的测量、加速度计的标定、四元数自对准;对蓝牙模块初始化,建立蓝牙通道;以固定时间间隔采集角速度、加速度等信息;在STM32通过预警算法程序得到车辆侧翻预警时间值,之后得到的倾侧角数据经过侧翻预警算法得到预警时间t,当t在规定的3 s内,则执行预警子程序,并给蓝牙模块STEVAL-MKI115V1提供预警信号。在驾驶室的蓝牙模块由LED灯和蜂鸣器进行声光报警。收到预警信号后,LED灯光由绿转红,蜂鸣器开始蜂鸣提醒驾驶员有危险,必须采取减速慢行或者回复方向盘的措施来保证行驶安全。

图7 软件流程图
5 结束语
提出的系统方案,可以满足对车辆侧翻的日常监护。嵌入设计使得该系统方案达到了对车辆进行随时随地监护的目的;侧翻检测功能的设计为司机行驶面对侧翻危险解除了后顾之忧;侧翻算法的设计,可以对车辆的侧翻及时可靠地进行预警。总之,该方案将在很大程度上消除车辆的侧翻隐患,为路上行驶车辆保驾护航。
[1]王淑华.MEMS传感器现状及应用[J].微纳电子技术,2011(8):216-222.
[2]张不扬,宗长富,王德平.车辆侧翻预警研究现状与关键技术[J].汽车技术,2010(8):27-31.
[3]金智林,张鸿生,马翠贞.基于动态稳定性的汽车侧翻预警[J].机械工程学报,2012,48(14):128 -133.
[4]朱颖,周炜,郭志平,等.基于车辆侧倾角侧翻预警算法的研究[J].机械设计与制造,2011(2):52-54.
[5]吴黎明,张力锴,李怡凡.基于ANN和单个三轴加速度传感器的汽车运动姿态测量[J].传感技术学报,2011,24(6):923-926.
