先验形状约束的水平集分割模型
2013-12-11贾士军
王 昆,贾士军,郎 博
(1.国核电力规划设计研究院,北京100095;2.北京铁科首钢轨道技术股份有限公司,北京102206)
一、引 言
高分辨率遥感影像中人工目标的分割一直是遥感图像处理领域研究的热点,然而由于城市面貌的日新月异,以及人工地物的复杂多样,如何快速、准确、全自动地提取目标地物一直是遥感图像处理领域的瓶颈。以建筑物为例,此类地物在图像中极易受阴影、道路及树木等其他地物的干扰,导致分割准确性较低,因此越来越多的研究考虑加入人的先验知识,以改善分割效果。
水平集是解决曲线演化问题的强有力工具,它可以将图像本身的低层次视觉属性信息与待分割目标的先验知识有机结合,从而实现高精度的目标分割。特别是自Chan和 Vese结合 Level-set思想和 Mumford-Shah[1]模型提出 C-V 水平集模型后[2],越来越多的学者将这一较新的理论引入到遥感图像处理领域,并开展了一系列研究。Keaton等[3]和Niu[4]先后利用水平集方法对高分辨率影像(包括IKONOS多光谱、航空影像等)道路目标的分割进行了研究;Karantzalos对航空影像中建筑物目标的水平集分割模型进行了研究;杨耘等[5]利用多水平集分割模型开展了高分辨率遥感影像分类问题的研究;Bailloeul[6]初步研究了融合先验形状特征的水平集分割模型。
以上一系列模型的研究充分证明了利用水平集理论实现高分辨率遥感影像目标分割的可行性,为遥感影像目标提取的研究开辟了一条新思路。目前,针对先验形状知识的描述大多是通过预先建立目标形状的大量先验样本,然后对样本集进行统计训练,而检测影像中与之对应形状的目标,这类方法需要作大量的统计运算,而且具有很大的局限性,仅能检测样本集中特定形状的目标[7]。然而对于规则建筑物,即使特定为矩形的,其形状也是千变万化。因此,本文在区域驱动的C-V模型基础上,利用水平集理论在形状建模、恢复及自由拓扑变化方面的优势,提出了一种在分割中利用先验形状的约束检测建筑物的水平集分割模型,从而为改善复杂高分辨率影像中建筑物提取的准确性提供了一种新方法。
二、传统C-V模型的基本理论
2001年,Chan和Vese提出了一种简化的Mumford-Shah模型,即经典的C-V模型,它通过最小化能量函数的方式来演化曲线。设原图像I(x,y)被活动轮廓线C划分为目标ωo和背景ωb两个区域,它们的平均灰度分别为co和cb,则C-V模型最终的图像分割能量函数为[8]

式中,L(C)是闭合轮廓线C的长度;So(C)是曲线C内部区域的面积;μ、ν≥0、λo、λb>0 是各个能量项的权重系数;前两项为平滑项。
C-V模型利用了图像的全局信息,通过最优化能量函数(式(1))即可得到全局最优的图像分割结果[8]。
Chan和 Vese引入 Heaviside函数 Hε(z)和Dirac函数δε(z)将能量函数规范化,并根据变分法以欧拉-拉格朗日方法推导出了求解式(1)、以水平集函数Φ表达的偏微分方程[8]

三、先验形状约束的分割模型
1.图像预处理
在高分辨率遥感影像中,微小的细节信息也会对目标的准确识别造成一定的干扰,因此需要采用图像滤波技术来弱化或消除噪声的干扰。然而基于传统的空间域、频率域卷积的图像滤波方法(如低通滤波、中值滤波、小波等)往往会导致过度平滑,在消除区域内部细节的同时也削弱了目标重要的边缘信息[9]。
本文采用一种总体变差法[10](total variation,TV)弥补了以上方法的不足。它是一种非线性尺度空间中基于异向扩散的图像滤波方法,通过最小化图像I的总体变差来达到图像滤波的目的,从而缓解建筑物屋顶内部细节及周围目标的干扰,同时强化目标边界信息,提高区域同质性。
2.先验形状的建立
本文中建筑物目标的分割是基于矩形或矩形的组合这类普遍类型的目标进行研究的。通常在高分辨率遥感影像中,这类建筑物为规则的面状目标,在空间上连续且有很高的紧致度;在光谱和纹理特征上,与背景存在一定反差;同时目标边界的方向角变化为零或呈直角。基于这些人对建筑物目标的先验形状知识,本文建立了一种先验形状约束的水平集分割模型(SPLS模型),以剔除周围小目标地物对建筑物提取结果的影响。
本文研究的普遍类型的建筑物目标在空间上具有连续性,且单条边界的方向变化率为零,相邻边界相互垂直,局部特征表现比较规则,基于这种思想,通过分段检测目标边界建立一种先验形状。本算法是基于以下情况实现的:高分辨率影像中建筑物目标的大多数边界是未被干扰的,由此可利用这些未受干扰的边界信息来恢复受干扰的目标边界,从而得到一条连续平滑的边界。
利用水平集模型与时间相关的动态性,对整个分割过程采用分时段提取的方法,具体的算法步骤如下:
1)建筑物边界粗提取。在ΔT1时间段内,采用C-V模型,仅在图像灰度的作用下对建筑物进行粗分割,并提取初始边界。
2)边界拟合。对初始边界采用最小二乘直线拟合,并记录每条线段的起点、终点作为初始真实边界点。
3)真实边界点搜索。以某一线段开始,沿顺时针方向依次遍历步骤2)中得到的初始边界点,若相邻两条线段的夹角不在0°、90°或180°的阈值范围内,则认为该点为伪边界点,将其剔除;若相邻两条线段的夹角在90°的阈值范围内,还需判断该边界点所在线段的长度,当它小于某一阈值时,则认为该点是伪边界点,将其剔除,这里具体阈值的大小要根据真实建筑物目标的长、宽值设定。最后对真实边界点再次拟合,从而得到准确的边界。另外,当该目标中伪边界长度超过初始目标边界总长度的一半时,则认为该目标为非建筑物而将其剔除。
4)建立先验形状。将得到的准确边界的内部区域认定为目标区域,从而得到该区域的先验形状,最后将其用水平集函数表示。
3.模型的水平集求解
设ΔT1、ΔT2分别表示无先验形状约束时初始分割及先验形状产生后的曲线演化时间段。将上文建立的动态先验形状用一个与时间t、空间位置(x,y)有关的符号距离函数 Ψ(x,y,t)表示,所求的目标形状用水平集函数Φ(x,y,t)表示,则用正规化函数表示的形状项的约束能量为

上式表示目标形状与先验形状的接近程度,通过这个形状能量的约束驱动曲线向真实目标边界演化。
将式(3)定义的形状能量加入式(1)的能量函数中,则得到灰度图像下先验形状约束下的水平集分割模型
式中,co、cb表示影像中目标与背景区域的各波段光谱均值;其他变量与前述相同。该式同样适用于b波段的多光谱遥感影像I(I1,I2,…,Ib)。因此,该能量函数由图像能量项、曲线约束项及形状能量项共同构成。在曲线演化过程中,图像能量和形状能量交替作用,驱动曲线向目标边界移动。
对该能量泛函也采用变分法、梯度下降法,可得其偏微分方程

另外,要获得该式的定解必须要满足Neumann边界条件[8]。
四、建筑物提取结果及分析
1.精度评价方法
为直观地对比各方法的优劣性,本文采用以下简单的精度评定方法。以矢量化得到的建筑物目标为参照数据(其面积用B表示),假设各方法提取的建筑物结果中正确的面积为B1,错误的面积为B2,漏检的建筑物面积为B3。
1)完整性表示为

式(6)反映了某方法提取建筑物的能力,完整性越高,则漏检的目标越少。
2)正确率表示为

该值越高表示错检的目标越少。
3)总体精度[11]是在同时考虑漏检和错检情况下,对提取结果的一种整体评价,表示为

2.试验结果
为证明本文提出的SPLS模型的有效性,分别采用了两组不同地区的0.6 m分辨率的QuickBird全色影像和0.2 m分辨率的航空影像进行试验。这些影像包含了建筑物受周围树、道路等地物干扰,以及屋顶细节复杂等检测中常见的问题。试验分别对eCognition软件中的多尺度分割方法、C-V分割模型,以及本文中SPLS模型进行了对比及分析。SPLS模型与C-V模型的参数取值见表1。

表1 水平集分割模型参数取值表
(1)试验一
QuickBird影像3种方法的分割结果对比如图1所示。

图1 QuickBird影像3种方法的分割结果对比
图1中,(a)为原始影像其为0.6 m分辨率的QuickBird影像的大型厂房,大小为394像素×443像素;(b)为尺度 300、一致性0.3、紧致度0.5的eCognition分割结果;(c)为C-V模型分割结果,即无先验形状约束下SPLS的初始分割结果;(d)为SPLS模型的分割结果。
根据上文描述的精度评价方法,本试验中3种方法的提取精度见表2。
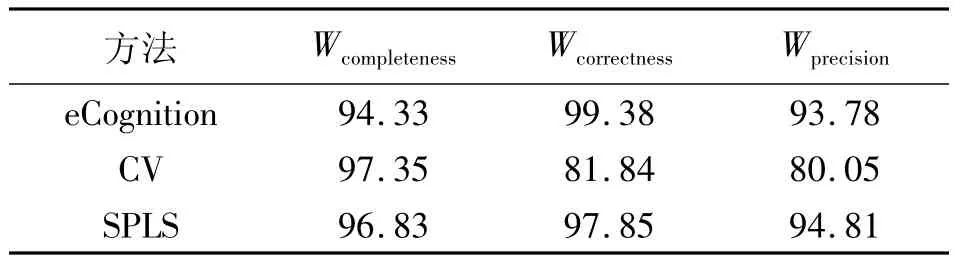
表2 3种方法的分割提取精度评价表 (%)
从表2可以看出,对于单目标的简单影像,本文中的SPLS模型较其他两种方法在总体精度上都有不同程度的提高。特别是相对于C-V模型提高很大,主要是由于先验形状的约束能够将C-V模型中混分的目标有效剔除,从而提高了目标检测的正确率;而相对于eCognition方法,主要是在完整性上有所提升,总体精度提高不大。
反映在图像上,如图1所示。由于先验形状的加入使建筑物对周围干扰具有一定的鲁棒性,特别是对于灰度相近的地物。如在图1(c)中,初始无先验形状约束时,左边地块也被误分割为建筑物,而通过形状的约束,它被有效地剔除了。相对于eCognition方法,SPLS模型可以同时分割出不同尺度的目标地物,但是在先验形状的建立上仍有一定误差。
(2)试验二
航空影像建筑物提取结果对比如图2所示。

图2 航空影像建筑物提取结果对比
图2中,(a)为原始影像其为珠海市某小区0.2 m分辨率的航空影像,大小为727像素×572像素;(b)为尺度 150、一致性 0.3、紧致度 0.5 的 eCognition分割结果;(c)为C-V模型分割结果;(d)为SPLS模型的分割结果。
本试验中3种方法的分割结果精度见表3。
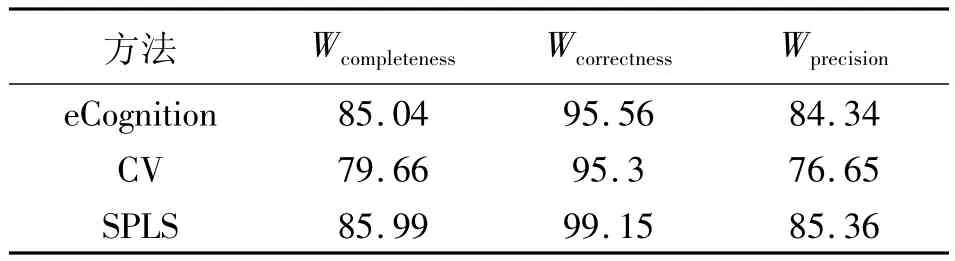
表3 3种方法的分割提取精度评价表 (%)
该影像的特点为:分辨率超高,建筑物内部细节复杂,周围道路、阴影干扰严重。因此,从表3可以看出,3种方法对这类复杂影像的提取精度都不高,但是本文SPLS模型结果相对表现最佳,特别是在准确率上,由于加入了人的先验形状知识,可以保证提取目标的准确性,且边缘光滑、连续,内部区域平滑;并且可以消除一定的阴影干扰。但是对于大面积阴影遮挡及其他形状相近的地物,无法取得较好结果。
综上,该SPLS模型在充分利用图像信息基础上,加入了形状特征的约束,在形状描述上更接近于目标真实形状,一定程度上消除了内部细节的干扰,提高了完整性及准确性,且目标边界光滑,减少了后处理操作。但是仍然存在漏检及错检的情况,特别是对于大面积、多目标地物的复杂影像,效果并不好;而且先验形状的建立完全依赖初始分割结果,通用性不强。
五、结束语
由于水平集理论在多特征融合性及形状建模方面具有较强的优势,本文研究了一种规则建筑物的先验形状特征,并且在随曲线演化过程中将该先验形状融入C-V模型中,改善了高分辨率遥感影像这类细节复杂影像中建筑物提取的准确性,为多特征融合的研究提供了一定的参考。试验表明,该方法基本能保持与eCognition多尺度分割相近的精度。但是该方法仅利用了一种简单的形状知识,并且只适用于规则的矩形建筑物,在后续的研究中可以考虑加入语义、上下文等其他约束信息,从而更有效地改善建筑物目标分割的准确性和速度。
[1]MUMFORDD,SHAH J.Optimal Approximation by Piecewise Smooth Functions and Associated Varitional Problems[J].Communications on Pure and Applied Mathematics,1989,42(5):577-685.
[2]VESE L A,CHAN T F.A Multiphase Level Set Framework for Image Segmentation Using the Mumford and Shah Model[J].International Journal of Computer Vision,2000,50(3):271-293.
[3]KEATON T,BROKISH J.A Level Set Method for the Extraction of Roads from Multispectral Imagery[C]∥Applied Imagery Pattern Recognition Workshop.Malibu:[s.n.],2002:141-147.
[4]NIU X T.A Semi-automatic Framework for Highway Extraction and Vehicle Detection Based on a Geometric Deformable Model[J].ISPRS Journal of Photogrammetry and Remote Sensing,2006(61):170-186.
[5]杨耘,马洪超,林颖,等.多水平集演化的高分辨率遥感影像分割[J].武汉大学学报:信息科学版,2008,33(6):588-591.
[6]BAILLOEUL T.Active Contours and Prior Knowledge for Change Analysis:Application to Digital Urban Building Map Updating from Optical High Resolution Remote Sensing Images[EB/OL].2005-08-15.http:∥kepler.ia.ac.cn/profile/timothee.
[7]田昊,杨剑,汪彦明,等.基于先验形状约束水平集模型的建筑物提取方法[J].自动化学报,2010,36(11):1502-1511.
[8]杨新.图像偏微分方程的原理与应用[M].上海:上海交通大学出版社,2003:80-103.
[9]杨耘.水平集框架下高分辨率遥感影像分类研究[D].武汉:武汉大学,2008.
[10]蒋伟.基于分数阶偏微分方程的图像去噪新模型[J].计算机应用,2011,31(3):753-756.
[11]SHAN J,LEE SD.Quality of Building Extraction from IKONOSImagery[J].Journal of Surveying Engineering,2005,131(1):27-32.
