基于无人机平台的测控设备精度鉴定系统
2013-12-11郝金明徐兆磊刘丙申
周 巍,郝金明,徐兆磊,刘丙申
(1.信息工程大学地理空间信息学院,河南郑州450052;2.中国人民解放军63883部队,河南洛阳471003)
一、引 言
测控系统完成对航天器的跟踪测量并实施控制,同时还是飞行安全控制、指挥显示的重要信息源,必须保持其良好性能和精度[1]。但是,由于制造工艺、设备安装、器件老化等原因会将测量误差引入测控设备,进而影响到测控系统的精度和可靠性[2]。因此,新研或改造的测控设备正式投入使用前,必须进行精度鉴定,以评估其是否满足研制或改造的技术指标要求。
早期测控设备的精度鉴定主要以弹道相机或光电经纬仪等光学测量数据作为比较标准,但光学设备对气象条件要求很高、数据处理周期长、跟踪能力有限。同时,光学设备跟踪目标数据时间段落较短,数据量根本无法满足测控设备精度跟踪范围内精度鉴定要求。随着卫星导航技术在经济、军事、科研和社会生活领域的广泛应用,基于GPS技术的飞机校飞方式成为常用的测控设备精度鉴定方法,形成了一套符合工程应用要求的精度鉴定系统,并得到了广泛的应用。但是,飞机校飞方法存在协调难度大、周期长、加装过程繁琐、效费比低等不足,难以满足日益增长及多样化的测控设备精度鉴定的需求。而无人机技术的迅猛发展为建立高效快捷的精度鉴定方法提供了强力技术支撑[3]。无人机校飞利用无人机平台搭载测控合作目标和小型化GPS测量设备,通过对测控设备跟踪数据和精度鉴定系统测量数据联合处理分析对测控设备精度进行鉴定,与有人机校飞相比,具有较强的适应性与生存力。本文探讨了无人机校飞精度鉴定系统的组成、工作模式及精度鉴定方法,通过实际飞行试验实现了完整的精度鉴定流程,并分析了无人机平台用于测控设备精度鉴定的可行性及试验效果。
二、系统组成
无人机校飞精度鉴定系统由无人机分系统、任务载荷分系统、指挥监控分系统、地面测量分系统、数据处理分系统5部分组成,如图1所示。
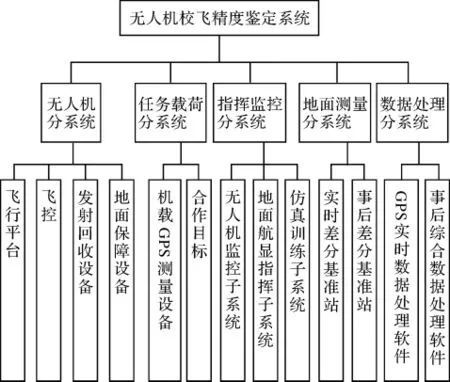
图1 基于无人机平台的测控设备精度鉴定系统组成
1.无人机分系统
2.任务载荷分系统
任务载荷分系统主要包含校飞任务所需的机载高精度GPS测量设备和测控设备合作目标,如应答机、信标机、点光源等。
3.指挥监控分系统
指挥监控分系统由无人机监控分系统和地面航显分系统组成。无人机监控分系统利用无人机自身飞控系统中的导航设备及各传感器的信息输出,监测并记录无人机的工作状态参数,显示无人机飞行航迹,并发出控制指令完成无人机的稳定飞行和安全回收[5];地面航显分系统通过数据传输设备接收机载GPS测量设备实时输出的高精度定位测速信息,为用户提供航显信息[6]。
4.地面测量分系统
地面测量分系统由实时差分基准站和事后差分基准站组成。实时差分基准站完成GPS数据采集,通过上行链路为机载GPS测量设备提供差分信息;事后差分基准站与机载GPS测量设备进行同步观测,完成基准站GPS原始观测数据采集和存储,为事后数据处理提供数据要素。
5.数据处理分系统
数据处理分系统能够对录取的机载GPS接收机和事后差分基准站的原始观测数据进行事后载波相位差分解算,提供测控设备精度鉴定所需的比对标准数据。
三、应用模式
根据试验需求,无人机校飞精度鉴定系统利用无人机平台搭载测控合作目标和小型化精度鉴定设备,通过对测控设备跟踪数据和精度鉴定系统测量数据进行联合处理分析,实现对被鉴设备的精度评定。
操作员根据任务规划的航路控制无人机飞行,机载GPS测量设备则接收地面实时差分基准站差分改正信息完成实时差分,并将解算结果下传至地面航显指挥分系统,实现飞行目标监控、快速比对和地面测控设备引导;通过事后综合数据处理,提供鉴定比对标准数据,实现对测控设备精度的分析和评定。典型应用模式如图2所示。

图2 无人机校飞精度鉴定系统应用模式
四、精度鉴定方法研究
1.GPS载波相位动态相对定位原理
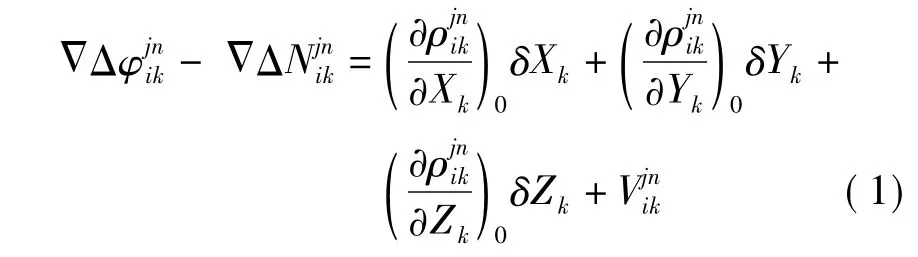
测控设备精度鉴定首先需要获取高精度标准比对数据,该数据是利用系统的无人机平台搭载GPS测量设备并与地面基准站进行载波相位相对定位解算来获取的。基准站i与机载站k对GPS卫星j、n进行同步观测,构成双差载波相位观测值并线性化表示为[7]
表示为矩阵形式为

采用卡尔曼滤波数据处理模型,其状态方程为
箭猪坡矿床的成矿作用受断裂活动、岩浆作用及地层岩性等因素控制,矿床形成均与花岗岩晚期阶段有关,为受构造裂隙控制的岩浆期后低温热液充填型脉状铅锌锑矿床。矿区中主要工业矿脉矿化较稳定,矿脉的倾向延伸和SN走向延长还未完全控制。随着深度的增加,元素组合出现变化,在矿区的深部隐伏岩体附近存在层状矿化体。

对应的观测方程为

式中,Xk=δRk。
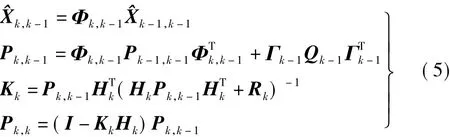
卡尔曼滤波递推方程式为
2.评定方法
测控设备精度评定的方法可简要地概括为:以无人机搭载的GPS系统定位结果为标准参考坐标,然后通过与测控设备定位数据的测量结果进行对比,得到测控设备的性能和精度,以研究其误差变化的规律。评定方法分为以下几个步骤[8]:
1)利用无人机搭载的GPS和地面基准站获取定位数据,利用载波相位相对定位数据处理,得到无人机轨迹的最佳估计。
2)对测控设备和GPS设备进行时间校正,并统一到同一时间系统下。
3)坐标变换,把目标参考坐标转换为方向角α、仰角β和斜距R。
4)对测控设备数据和参考数据进行对比,得出各个时刻的误差 δα、δβ、δR。
5)分析系统误差和随机误差,研究测控设备的误差变化规律,得到精度评定结果。
五、试验分析
采用基于无人机平台的测控设备精度鉴定系统实际飞行数据,以航向稳定度、横倾稳定度、俯仰稳定度为例对无人机平台的性能进行分析,如图3~图5所示,并将均值及均方根误差进行统计,见表1。各项指标表明,无人机平台能够为任务载荷提供飞行条件,并完成测控设备精度鉴定中标准数据的获取。

图3 航向稳定度曲线

图4 横倾稳定度曲线

图5 俯仰稳定度曲线

表1 俯仰稳定度曲线 (°)
由于无人机载荷能力及任务舱设备加装空间的限制,精度鉴定任务中机载GPS测量设备应选用小型化GPS接收机及天线。对实际飞行数据分析发现,接收机工作稳定,未出现卫星失锁现象,并获取了完整的无人机飞行轨迹,如图6所示。经载波相位动态相对定位解算后,对各历元定位结果的标准偏差统计如图7和表2所示。结果表明:系统基于GPS载波相位动态相对定位技术,能够获得厘米级的动态定位精度,高出测控设备定位精度数倍,完全可以作为标准参考值用来对测控设备是否合格进行评定。

图6 飞行航迹

图7 定位结果标准偏差
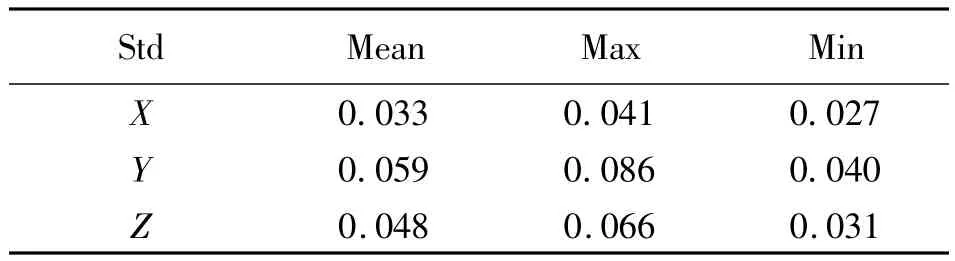
表2 定位结果标准偏差统计m
六、结束语
本文探讨了基于无人机平台的测控设备精度鉴定系统的组成、工作模式及鉴定方法,通过实际飞行试验实现了完整任务流程,并分析了试验效果。结果表明,无人机平台能够为任务载荷提供良好的飞行条件,而且其具有价格便宜、操作简单、机动性强、测量周期短、应用范围广等优点,极大地缩减了试验成本、扩展了应用区域;系统中无人机搭载的小型化GPS接收机工作稳定,能够提供高精度标准数据。无人机校飞精度鉴定系统为实现对测控设备的精度鉴定提供了一种新的高效快捷的解决方案。
[1]解海中,张守信,董绪荣.航天测控设备GPS精度鉴定方法研究[J].指挥技术学院学报,1999,10(3):30-34.
[2]武红霞.雷达动态性能检验和精度鉴定方法[D].南京:南京理工大学,2008.
[3]FAHLSTROM P G,GLEASON T J.无人机系统导论[M].北京:电子工业出版社,2003.
[4]姜杨,薛艳峰,陈剑涛.某型无人机飞控系统设计与实现[J].计算机测量与控制,2009,17(5):911-913.
[5]李芸.面向小型无人机的空地数据链系统研究[D].西安:西北工业大学,2005.
[6]王静.无人机地面综合显示系统的研究[D].南京:南京航空航天大学,2004.
[7]张守信.GPS卫星测量定位理论与应用[M]长沙:国防科技大学出版社,I996.
[8]晋志普,陆文娟,朱纪洪,等.用无人机GPS系统对雷达进行精度评定的方法[J].清华大学学报,2001,41(9):40-43.
