基于自适应模糊PID 的全自动压力检定系统
2013-12-10谭金程杨
谭金,程杨
(中国航天科工集团七八〇一研究所,湖南 长沙410205)
0 引言
近年来,随着国内压力设备及其相关仪表使用量的增加,对压力检定的需求也日益增多,为提高计量检定的效率,大多数计量检定机构都购置了全自动压力检定系统,全自动压力检定系统通常包括调压装置和配套的压力传输管路等,由于调压装置以及管路延迟的固有特性,决定了它是纯滞后、大惯性和非线性的系统。采用常规PID 控制器对全自动压力检定系统进行控制,往往因为系统具有非线性、时变不确定性、难以建立准确数学模型而不能达到理想的控制效果,且容易产生超调。模糊控制器不要求掌握受控对象的准确数学模型,可以补偿系统中非线性因素的影响,获得良好的动态特性,但是模糊控制器难以消除静态误差,稳态精度不高。本文将模糊控制器与常规PID控制相结合,既有模糊控制适应性强的优点,又有PID控制精度高的特点,可在短时间内实现设定压力的稳定输出,且无过冲压力,满足全自动压力检定系统快速、准确、稳定的要求。
1 全自动压力检定系统
全自动压力检定系统的核心是压力调压装置,如图1 所示。压力调压装置主要由DSP 控制单元、交流伺服电机、压力检测反馈单元以及由丝杠传动的活塞装置。其中压力检测反馈单元GDP 系列智能数字压力模块,内涵CPU、高速A/D、温度传感器等,可直接将系统输出压力信号转换成数字信号送给DSP核心控制单元,作为压力显示和反馈信号使用,省去了DSP核心控制单元对压力信号的量化处理,提高了系统的响应速度。
全自动压力检定系统的工作原理为,由键盘或上位机输入预先设定的压力值给中央处理器单元,中央处理器单元通过比较设定值与压力反馈信号值,产生偏差信号,通过自适应模糊PID 控制器调节交流伺服电机,交流伺服电机通过丝杠带动活塞运动,实现压力的自动调节功能[1-2]。
2 自适应模糊PID 控制器的设计
自适应模糊PID 控制器设计的重点是确定三个输出参数调整量与误差e 和误差变化率ec之间的模糊关系,且在压力检定系统的运行过程中检测误差e 和误差变化率ec,根据相应的模糊控制规则对三个参数进行在线修正,根据修正后的数值对压力检定系统进行控制,以获得较好的动态和静态控制效果。
2.1 自适应模糊PID 控制器的结构
模糊控制器输入输出分别为两输入、三输出,即误差e 和误差变化率ec作为输入,PID 控制器三个参数的修正值作为输出。PID 控制器参数的模糊自适应调整如公式(1)所示:

式中:Kp,Ki,Kd分别为PID 控制器某时刻对应的比例系数、积分系数和微分系数;Kp',K'i,K'd分别为PID 控制器初始时刻对应的比例系数、积分系数和微分系数;ΔKp,ΔKi,ΔKd分别为PID 控制器此刻的调整量。参数自适应PID 控制器就是找到PID 控制器3个参数的调整量ΔKp,ΔKi,ΔKd与全自动压力检定系统设定压力和实际压力的误差e 以及误差变化率ec之间的关系,并且在系统运行过程中通过对误差e 以及误差变化率ec的检测,进行ΔKp,ΔKi,ΔKd参数的在线调整[3-5]。

图1 压力调节装置原理图
为保证系统在压力调节过程中能够迅速到达设定值,并保持检定压力的动态稳定,采用二维模糊控制器。压力系统选择控制器的输入变量为压力误差e 以及误差变化率ec,输出变量为PID 的控制参数Kp,Ki,Kd,对不同的工况调整PID 参数,这样既可以达到较好控制效果,实现的难度也不会很大。
2.2 确定隶属度函数
压力误差e 的基本论域为[-10 MPa,+10 MPa],误差变化率ec基本论域为[-20 MPa/s,+20 MPa/s];取e 和ec的模糊子集为E/EC= {NB,NS,ZO,PS,PB},分别表示{负大,负小,零,正小,正大}。将误差e以及误差变化率ec量化到[-2, +2]的论域内,隶属度函数要求是凸模糊集合,不允许出现如非凸模糊集合的隶属度函数。实际应用中,为了简化计算常选用三角形、梯形等作为隶属度函数,就是为了满足凸模糊集合的要求。本文隶属度函数采用灵敏度高的三角形函数。输出变量Kp的基本论域为[-1,+1],Ki的基本论域为[-0.2,+0.2],Kd的基本论域为[-2,+2]。选取输出量Kp,Ki,Kd的模糊子集为KP/KI/KD= {NB,NS,ZO,PS,PB},量化到[-2,+2]的论域,隶属度函数选择三角形函数。
2.3 确定模糊控制规则表
PID 控制参数需分析三个参数之间的相互关系,对于不同的误差e 和误差变化率ec,模糊控制器参数自整定的基本原则如下[6]:
1)当误差较小即接近于设定压力值时,为保证系统具有良好的稳态特性,Kp和Ki取值应增大一些;同时为避免系统在设定值附近出现振荡,并考虑系统的抗干扰性能,当误差变化率较小时,Kd可取大一些;当误差变化率较大时,Kd应取小一些。
2)当误差和误差变化率处于中等大小时,为使系统响应具有较小的超调,Kp应取小一些;同时为保证系统的响应速度,Ki和Kd的取值要适中,特别是Kd对系统响应的影响较大,取值时应慎重。
3)当误差较大时,为加快系统跟踪响应性能,应取较大的Kp和较小的Kd值;同时为防止系统响应出现较大的超调,产生饱和积分,应对积分作用加以限制,通常取较小的Ki值。
把这些规则生成模糊控制规则表,如表1 所示。
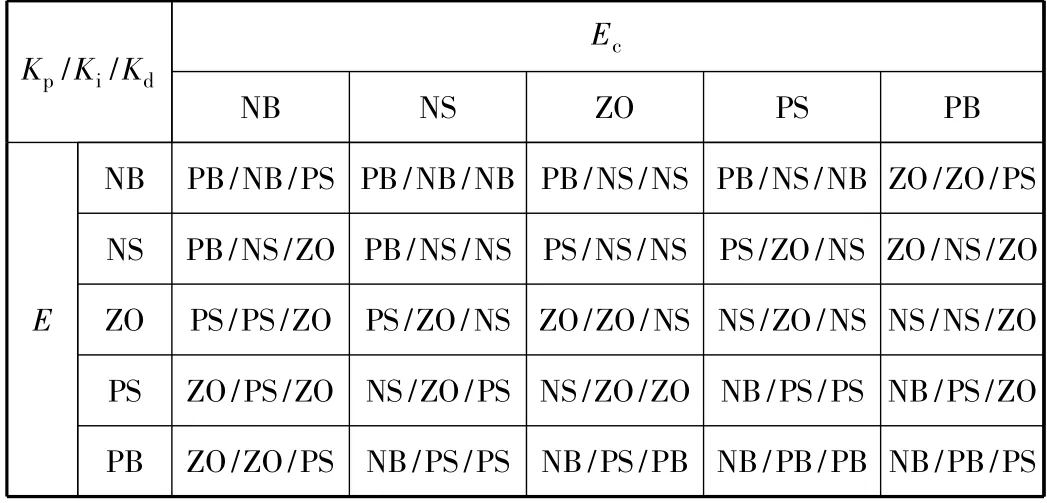
表1 输出模糊变量的模糊规则表
2.4 非模糊化
非模糊化的过程就是把语言表达的模糊量映射为准确的调整量,即根据输出模糊子集的隶属度计算输出的确定值。一般由某时刻的误差e 和误差变化率ec,根据它们的隶属度函数曲线求出它们的隶属度;再依据已确定的模糊控制规则表进行相应的解算,得出Kp,Ki,Kd各语言值的对应隶属度;最后计算得到Kp,Ki,Kd的修正值K'p,K'i,K'd,代入公式(1),即可得到Kp,Ki,Kd的调整值。在求得每组输入模糊语言变量对应的输出值后,便可生成一张模糊控制表,系统实现过程中,对模糊规则的结果进行处理后,通过查表完成对控制器PID 参数的在线整定。
3 系统仿真
为了验证自适应模糊PID 控制器的控制效果,本文根据系统的数学模型,用Matlab/Simulink 及模糊控制工具箱进行仿真,系统响应曲线如图2 所示。
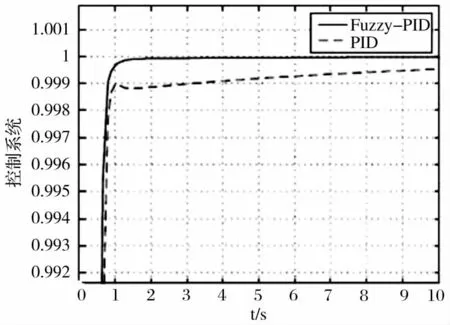
图2 系统响应曲线
通过两种控制方法的仿真结果可以看出,自适应模糊PID 控制在常规的PID 控制基础上增加了对Kp,Ki,Kd三个参数的修改,具有良好的适应能力和非线性逼近能力[7]。
这种自适应模糊PID 控制响应的速度较常规的PID要快,过渡时间短,过渡过程平稳,系统的超调小,跟踪性能好;常规PID 控制曲线不平稳,系统过渡时间较长,系统控制品质较差。在稳态误差方面,自适应模糊PID 控制较常规的PID 小。以上仿真效果说明自适应模糊PID 输出能很快跟踪输入变化,比常规PID的控制效果好。
4 结束语
全自动压力检定系统由于存在较严重的非线性、参数的时变性和负载干扰,所以研究先进的控制策略对全自动压力检定系统的发展具有重要意义。本文将模糊控制与常规PID 控制相结合,设计了自适应模糊PID 控制器,不仅不需要系统准确的数学模型,且具有较好的静、动态特性,稳定性也较好,基本能实现无超调控制。通过仿真分析发现,自适应模糊PID 能在较短时间内达到压力预设值、稳态误差小,而且系统也具有更好的适应性和鲁棒性。
[1]王玉弟,肖志一,田波. 压力自动检定系统的开发与应用[J]. 工业计量,2003 (6):17 -18.
[2]黄石敏,蔡晋辉. 自动压力校验系统设计[J]. 中国计量学院学报,2011 (9):242 -245.
[3]张化光,何希勤. 模糊自适应控制理论及其应用[M]. 北京:北京航空航天大学出版社,2002.
[4]庄利锋,杨慧中. 模糊自适应PID 控制器的设计及应用[J]. 自动化与仪表,2004,(1):37 -39.
[5]张恩勤,施颂椒,翁正新. 模糊控制与PID 控制方法的比较[J]. 上海交通大学学报,1999,33 (4):501 -503.
[6]楼顺天,胡昌华. 基于MATLAB 的系统分析与设计:模糊系统[M]. 西安:西安电子科技大学出版社,2001.
[7]刘金琨. 先进PID 控制MATLAB 仿真[M]. 北京:电子工业出版社,2004.
