GPS 授时信号同步方法研究与应用
2013-12-10才滢崔保健赵海鹰
才滢,崔保健,赵海鹰
(中国人民解放军92493 部队89 分队,辽宁 葫芦岛 125000)
0 引言
GPS 全球定位系统与北斗导航定位系统在提供实时导航信息的同时提供精确的时间信息,导航电文中即包含授时信息[1]。一般授时型接收机可提供同步于UTC 或者GPS 的秒脉冲信号,例如M12T 型GPS 接收机、WGB12 北斗接收机;该信号的授时准确度优于50 ns[2],通常在电力、通讯领域作为时间基准使用。但在实际应用中,卫星信号的调整、天线被干扰及GPS接收系统故障等因素都会造成卫星失锁或信号偏差,这时就需要本地时钟同步于定位系统的授时信号,当卫星信号失锁时依靠本地钟授时,卫星信号恢复时,重新同步[3-5]。本地时钟的秒信号通常由本地晶振、铷钟或者铯钟经过分频得到,这种依靠简单数字电路产生的信号的同步精度会受系统工作时钟的限制,若系统时钟10 MHz,其同步精度在100 ns 左右;而采用锁相技术设计的同步电路虽然精度高,但电路设计较为复杂[6]。
本文提出一种基于精密时间数字转换器、复杂可编程逻辑电路和硅延迟线技术的精密秒脉冲同步方法,同步精度可达0.25 ns,可在GPS 授时同步钟项目中应用。
1 脉冲同步原理
GPS 和北斗定位系统输出的1 PPS 或100 PPS 脉冲信号作为授时信号,本地铷钟或晶振的10 MHz 信号与该信号同步,GPS 接收机的秒脉冲信号作为分频计数的开门信号;在GPS 接收机的秒脉冲上升沿,分频电路产生的1 PPS 秒信号触发分频计数器,对OCX 输出信号10 MHz 进行分频,实现两个脉冲信号的同步。同步精度依赖于OCX 信号与GPS 信号的初始相位差,最大同步误差取决于OCX 信号频率;频率越高,同步精度越高,10 MHz 同步精度最大误差100 ns。若要实现1 ns 同步精度,就要求工作时钟频率高达1 GHz,在电路设计上难于实现。
锁相环同步技术是将晶振的10 MHz 输出信号经过计数器分频得到1PPS 信号,该信号与GPS 输出的1PPS 信号同时送入鉴相器;鉴相输出电压调整压控振荡器输出信号频率和相位,实现两个信号的同步,从而提高同步精度;但是,对1PPS 同步,要求鉴相器工作频率较低,鉴相器鉴相和环路滤波器设计调节较为困难[6]。基于TDC 和硅延迟线脉冲同步原理如图1 所示。

图1 基于TDC 和硅延迟线脉冲同步结构框图
一是分频处理,用于对压控晶振、铷钟或铯钟的10 MHz 信号分频产生1PPS 信号;二是同步触发单元,在微处理器控制下,对技术分频链清零,重新计数。
在微处理器控制下,TDC 时间数字转换器件测量CPLD 分频输出的1PPS 信号与GPS 接收机输出的1 PPS 信号的脉冲相位的时间间隔;该时间间隔在0 ~100 ns 之间;微处理器通过控制硅延迟线对分频输出的脉冲信号进行退后或前移,从而实现脉冲同步,同步分辨率0.25 ns。
2 脉冲同步硬件电路设计
2.1 脉冲相位测量单元
为实现两个脉冲序列的同步,必须测量两脉冲序列的相位差。脉冲相位差可用两个脉冲上升沿的时间差表示,通常采用计数器实现这一功能。考虑小型化和技术成本的要求,本文采用德国ACAM 公司研发的时间间隔测量芯片实现时间间隔的数字化测量。时间间隔测量芯片已在高精度激光测距仪、频率和相位信号分析等多种领域得到了广泛应用,可提供两通道250 ps 或单通道125 ps 分辨率的时间间隔测量;每个通道可采样四次,测量范围3 ns ~200 ms;通过软件可对分辨率进行精确性调节,校正和控制时钟的频率在500 KHz ~350 MHz 之间。TQFP44 芯片封装方式便于手持,工业温度范围40 ~85 ℃,工作电压2.7 ~5.5 V,功耗较低。时间间隔测量原理如图2 所示。

图2 TDC 时间间隔测量原理
TDC 内部包含两个计数器,一个是整周期计数器,用来保存起始和停止信号之间内部计数器对参考时钟的计数值CC,它是在起始信号到来后,参考脉冲第一个上升沿开始至停止脉冲到来后第一个参考脉冲的上升沿为止;FC1 是起始脉冲和之后第一个时钟脉冲上升沿的计数,FC2 是停止脉冲和之后第一个时钟脉冲上升沿的计数,Cal1 是一个参考脉冲的计数,Cal2 是两个参考脉冲的计数。
起始脉冲和停止脉冲的时间间隔ΔT 为

2.2 可编程硅延迟线
DS1023 是DALLAS 公司的8 位可编程延迟线,步进调整分辨率0.25 ns,具有片上延时参考端,可以配置成延迟线、脉宽调制器或者自由振荡器;采用并行或串行控制接口设计,具有5V 和3.3V 供电方式,方便与微处理器接口,可以多个延迟线级联使用;对脉冲宽度没有要求,可以实现一周期和多周期延迟,可用于脉冲延迟、脉宽调制和设计振荡器等。用微处理器控制DS1023 可以实现脉冲序列延迟时间的精确控制。
2.3 CPLD 脉冲同步结构
2.3.1 脉冲粗同步
在GPS 秒脉冲信号上升沿,微处理器响应中断,并将SYNC 信号置为低电平,启动分频计数链对晶振输出的10 MHz 信号进行107 分频,分频输出1PPS 脉冲信号与GPS 直接输出的1PPS 脉冲的相位差为0 ~100 ns,由于以GPS 秒脉冲作为分频链的触发脉冲,所以晶振分频输出的秒脉冲只能滞后于GPS 秒脉冲,即同步精度为0 ~100 ns,可实现GPS 秒脉冲和晶振分频秒脉冲的粗略同步。
2.3.2 脉冲精细同步
在两个秒脉冲序列粗同步后,脉冲同步范围在0 ~100 ns 之间,同步精度依赖于微处理器响应速度和晶振的频率,晶振频率越高,同步精度越高。而延迟线只能将脉延迟推后,因此,粗同步分频的分频数为107-1,粗分频脉冲比GPS 秒脉冲提前0 ~100 ns。由TDC 测量GPS 秒脉冲和OCX 分频后秒脉冲的时间差,控制DS1023 延迟线延迟同样时间,实现两个脉冲的精确同步;其同步准确度依赖于TDC 测量准确度和DS1023 的延迟调节步进量,TDC 测量精度和DS1023延迟的最大分辨率均在0.1 ns。因此,这种方法可以实现亚纳秒级的脉冲同步。
由于GPS 和晶振的频率存在较大偏差,GPS 输出1PPS 秒脉冲虽然具有20 ~30 ns 的抖动,但不存在漂移。晶振频率准确度较低,漂移较大,因此,随着时间延长,GPS 输出的1 PPS 和晶振分频输出1PPS 两个信号的相位差会逐渐增大,甚至超过100 ns,达到微秒和毫秒量级,仅通过DS1023 延迟线不能满足要求。若通过延迟线级联,对于相位差较大的延迟需要的延迟芯片数量会大大增加硬件设计成本,而通过微处理器控制CPLD 增大和减小分频计数链的系数,可实现脉冲的任意时间间隔推后和前移,将脉冲相位差调整到DS1023 的控制范围内,精细调整依靠DS1023 实现。宽范围脉冲同步原理如图3 所示。
3 同步实验结果
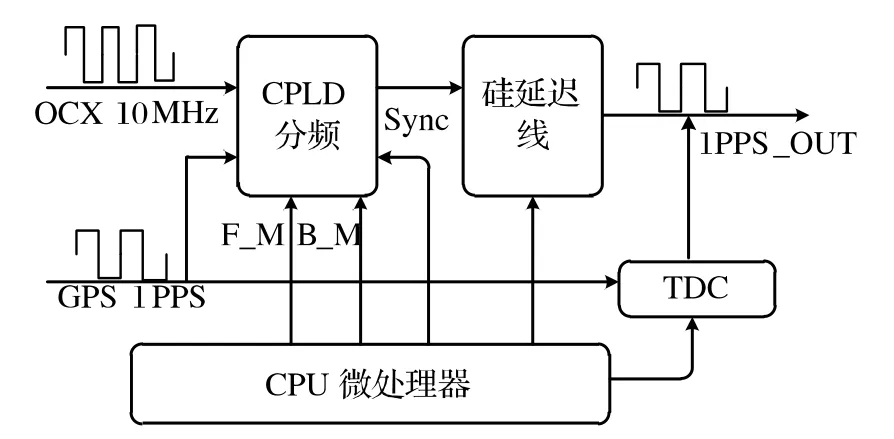
图3 宽范围脉冲同步原理框图
通常,若NORMAL 和SYNC 为同一分频值,T0 时刻两者同步。在START_ PULSE 上升沿,如果INC_DEC 为高电平,分频技术链数值为正常分频系数减1,T1 时刻分频后脉冲较正常分频脉冲前移一个时钟周期;如果INC_ DEC 为低电平,分频技术链数值为正常分频系数加1,T2 时刻分频后脉冲较正常分频脉冲推后一个时钟周期。CPLD 控制脉冲前移和推后软件仿真结果如图4 所示。GPS 驯服铷钟设计中的GPS 秒脉冲和铷钟分频秒脉冲同步效果如图5 所示。微处理器通过串口接收GPS 接收机的输出信息,当GPS 接收机锁定卫星后,微处理器发送同步信号,实现GPS 秒脉冲信号与OCX分频秒脉冲信号粗同步,同步精度大约70 ns;TDC 测量粗同步后的脉冲时间差,通过硅延迟线将OCX 分频秒脉冲推后,实现两个脉冲的精确同步,同步精度0.5 ns。

图4 CPLD 脉冲同步仿真结果
4 结论
本文针对GPS 同步时钟研究设计中的脉冲同步问题,提出了基于微处理器和TDC 实现脉冲相位精确测量及控制CPLD 器件和硅延迟线实现脉冲精确同步的方法。该方法具有同步范围宽、稳定性好、同步精度高的特点,完全满足GPS 同步时钟设计要求,可以广泛应用于电力统、通信统、时统系统和授时、守时及计量测试领域。

图5 GPS 秒脉冲和铷钟分频秒脉同步效果
[1]边少锋,李文魁. 卫星导航系统概论[M]. 北京:电子工业出版社,2005.
[2]Lewandowski W,Azoubib J,Klepczynski W J. GPS:Primary Tool for Time transfer[C] //Proceedings of IEEE,1999.163-172.
[3]李泽文,姚建刚,曾祥君,等. 基于数字锁相原理的GPS高精度同步时钟产生新方法[J]. 电力系统自动化,2009,33 (8):82 -85.
[4]曾祥君,尹项根,LI K K,等.GPS 时钟在线监测与修正方法[J]. 中国电机工程学报,2002,22 (12):41 -46.
[5]曾祥君,尹项根,林干,等. 晶振信号同步GPS 信号产生高精度时钟的方法及实现[J]. 电力系统自动化,2003,27 (8):49 -53,89.
[6]张嘉梁,王 剑. 基于数字锁相环的晶振频率同步模块设计[J]. 电子技术应用,2011,37 (10):60 -62.
