电动汽车制动与能量回馈技术研究
2013-12-07渠彦彦颜钢锋
渠彦彦,颜钢锋
(浙江大学 电气工程学院,浙江 杭州 310027)
随着全球环境污染和能源问题的日益严重,电动车辆迎来了发展契机。但是,电动车辆所遇到的最大问题是续航里程短。因此,如何有效地利用电池能量是发展电动车辆所面临的一个重要问题。
本文以电动车用直流无刷电机(BLDCM)[1]为研究对象,提出了一种简单有效的方法,将刹车产生的能量转换成电能然后再存储到电池中,以此延长电动车的续航里程。
1 能量回馈制动的工作原理分析
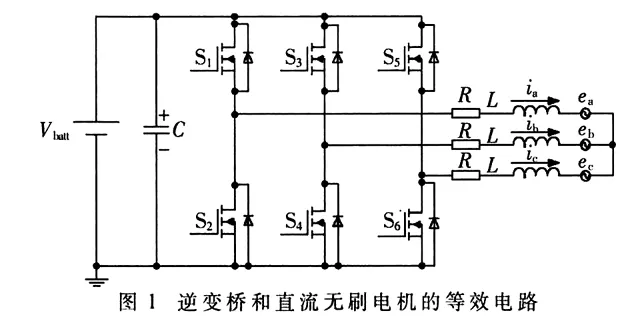
BLDCM的等效电路与逆变桥如图1所示[2]。R、L分别是电枢电阻、电感;ea、eb、ec分别是 a、b、c相的反电动势。ia、ib、ic是对应的相电流。图2是 BLDCM在电动和制动状态时的开关序列。其中,ea、eb、ec是电机的相反电动势,H1、H2、H3是霍尔信号;S1~S6是开关信号。在电动状态时,上桥臂开关管 S1、S3、S5为 PWM 调制,下管 S2、S4、S6为常开或常关。在制动状态时,上管全部关闭,下管为PWM调制。
1.1 电动状态
从图2可知,一个电周期内有6个状态,以状态Ⅰ作为研究对象。图3给出了状态Ⅰ的等效电路。在PWM信号为高电平时,功率管S1与S4饱和导通,电流经 S1→a、b相绕组→S4与电源闭合。如图3中实线回路所示。a、b相绕组所加电压为Vbatt,电机处于电动工作状态。
在 PWM信号为低电平时,S1关闭,S4继续饱和导通,电流回路为 S4→D2→a、b相绕组→S4,如图 3中虚线回路所示。a、b相绕组上所加电压为零,电机处于电动续流状态。
1.2 制动状态

由于电机属于感性器件,根据升压斩波原理,可通过合理控制各桥臂功率管的通断,实现回馈充电。根据上述原理,可将上桥臂 S1、S3、S5全部关断,下桥臂 S2、S4、S6轮流进行PWM调制以产生回馈电流。下桥臂功率管的调制顺序由霍尔信号决定,能量回馈时霍尔信号与功率管开通情况如图2所示。当控制器接收到刹车信号时,电机从电动状态切换至制动状态。下面以状态Ⅰ为例分析电机处于制动状态时的工作原理及过程。图4所示为电机在制动状下阶段Ⅰ的开关信号S2和对应相电流的波形。

设从t0至t2为S2的一个开关周期T,S2在t0时刻开通,t1时刻截止,电机a、b绕组中电流i的波形如图4所示。
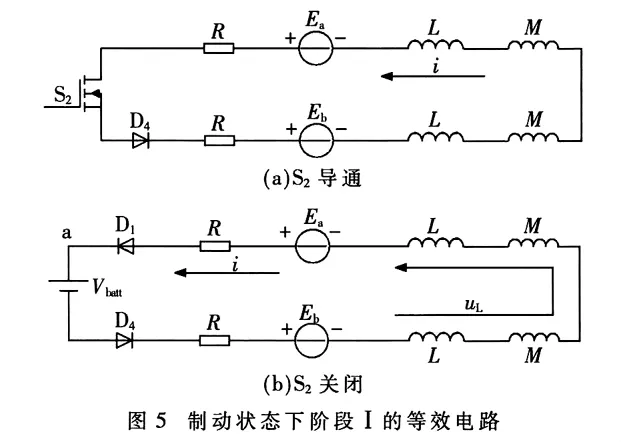
对状态Ⅰ进行分析,在[t0,t1]时间段功率管 S2饱和导通,电流回路为S2→D4→a、b绕组→S2。此时属于电机电感储存磁场能量的过程。具体等效电路如图5(a)所示。
忽略 S2、D4的管压降,此时回路电压方程为[3]:

i的大小为:

在分析能量关系时忽略电阻R,则此时间段存储在电机电感2(L-M)中的磁场能量WL为:

在[t1,t2]时间段,功率管 S2闭合,电流经 D4→a、b 相绕组→D1与电源闭合。此时电机电感释放所存储的磁场能量,为蓄电池充电,等效电路如图5(b)所示。
电路电压方程为:

电流为:

则蓄电池所吸收的能量为:

式中We为[t1,t2]时间段,汽车动能经电机反电动势作用转化的电能,W′L为电感在[t1,t2]内释放的磁场能量。
假设电机稳态运行时,电感在[t0,t1]内吸收的能量等于在[t1,t2]内释放的能量,即 WL=W′L,则有:

在不考虑电流i和Uab脉动的情况下,从式(7)可得:式中d为PWM的占空比。

由此可知,通过选择合适的d值,在S2截止时,可使蓄电池两端电压Uab≥Vbatt,即升压斩波,从而实现能量回馈。
2 电机控制器设计
本控制器研究的对象是72 V、5.5 kW的直流无刷电机。所用的微控制器是STM32F103RCT6。
2.1 控制系统的硬件设计
控制系统的硬件电路主要由控制电路、转子位置检测电路、驱动电路和逆变电路4部分组成,系统的硬件结构如图6所示。模块Ⅰ为控制电路,包括STM32最小系统和外部信号输入,如电压、温度、转把、刹车、霍尔信号等;模块Ⅱ为转子位置检测电路;模块Ⅲ为逆变电路;模块Ⅳ为驱动电路,驱动方式为自举驱动,驱动芯片是IR2110。

在实际工作过程中,主控芯片STM32处理外部输入信号(如转把、刹车信号等),根据转子位置传感器所提供的信号,按照相应的换相逻辑发出一定占空比的PWM信号。驱动电路将接收到的PWM信号放大处理,用以驱动逆变电路中的功率管以希望的开关频率和占空比导通或关断。从而使电机连续旋转并输出转矩及功率。
2.2 控制系统的软件设计
本控制系统的软件部分主要内容包括主程序和ADC中断子程序等。ADC中断子程序是程序设计的最主要部分,主要完成电机工作状态判定、相电流采样及软件滤波、速度计算、电动状态的速度和电流双闭环算法、制动状态的电流闭环算法等。ADC中断子程序流程图如图7所示。
3 仿真及实验结果
为了验证本控制系统的可行性和可靠性,使用PSIM进行计算机仿真。PSIM用于仿真整个电机控制系统及电动和制动工作状态的运行。仿真电路采用简化的控制电路。
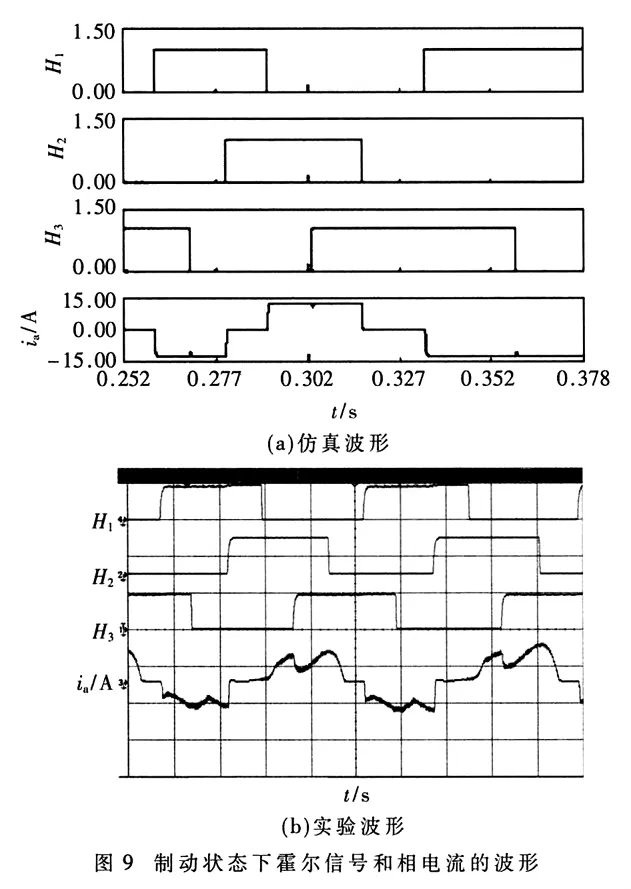
图8(a)和图8(b)分别为电机工作在电动状态下,霍尔信号 H1、H2、H3以及电机相电流 ia的 PSIM仿真和实验结果波形图。而图9(a)和图9(b)分别为电机工作在制动状态下, 霍尔信号 H1、H2、H3以及电机相电流 ia的PSIM仿真和实验结果波形图。
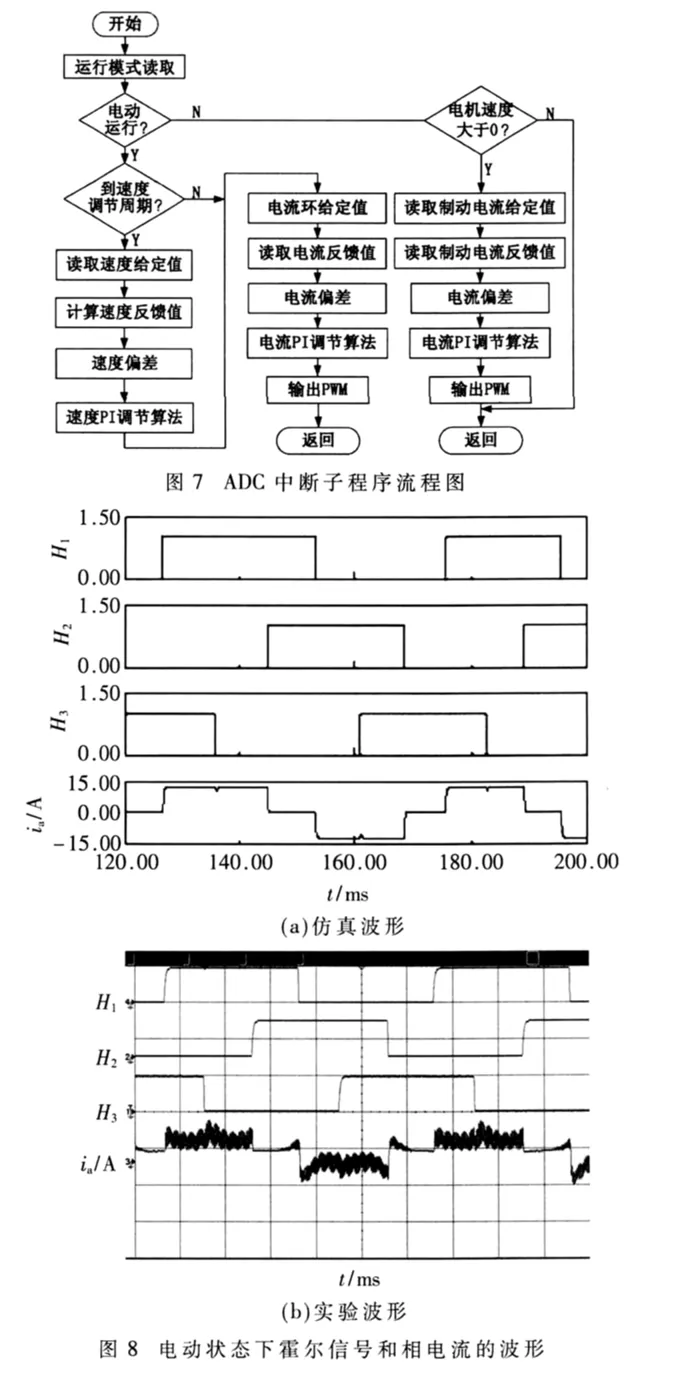
比较图8和图9,相电流方向恰好相反,与理论分析的结果一致。验证了控制策略的正确性。
当控制器工作在电动状态时,转把信号有效,刹车信号无效;当控制器工作在制动状态时,转把信号无效,刹车信号有效。样机实验中先使电机工作在最大速度的电动状态,即Speed=426 r/min,然后调整刹车信号给定制动电流,此时电机工作在制动状态。电机的状态切换以及相电流ia和直流母线电流ibatt的波形如图10所示,图中给定制动电流为45 A。由图10可知,当电机运行在电动状态时直流母线电流为正,电池释放能量;当电机运行在制动状态时,直流母线电流为负,电池吸收能量。实验结果表明,本方法可以实现电机制动时的能量回馈。
本文提出了一种简单有效的方法来实现直流无刷电机的制动与能量回馈。电动状态与制动状态的切换通过控制器内部控制策略完成,无需做任何硬件变动。通过PSIM仿真和样机实验,验证了本方法的可行性。

[1]郭庆鼎,赵希梅.直流无刷电动机原理与技术应用[M].北京:中国电力出版社,2008.
[2]孙立志.PWM与数字化电动机控制技术与应用[M].北京:中国电力出版社,2008.
[3]黄斐梨,王耀明,姜新建,等.电动汽车永磁无刷直流电动机驱动系统低速能量回馈制动的研究[J].电工技术学报,1995,10(3):28-31.
