基于操纵稳定性的轮胎特性匹配汽车操纵逆动力学研究
2013-12-05王国林梁辛欣
王国林 梁辛欣
江苏大学,镇江,212013
0 引言
轮胎的特性和整车操纵稳定性是相互匹配的关系,轮胎的性能对汽车的操纵稳定性具有显著的影响。在整车研发过程中,如能预测满足操纵性能的轮胎特性,不但可以在车辆研发阶段通过精确的理论计算得到最佳匹配轮胎的特性方案,还可以避免研发的盲目性,提高研发效率,同时也可以给轮胎供应商的匹配工作提供指导[1]。合理正确地预测轮胎特性是以汽车操纵稳定性评价、汽车动力学模型和汽车逆动力学研究为基础的。在轮胎对汽车操纵性能影响方面,国内外学者开展了大量的研究工作,已经证明了汽车使用前后不同特性的轮胎组合对操纵稳定性能的影响[2-3],我们称之为解决汽车操纵动力学“正问题”的方法。而汽车操纵逆动力学研究思路与“正问题”的不同在于:在已知汽车模型、汽车的运动性能(汽车响应)的基础上,反求出所允许的汽车参数指标,进而分析匹配什么样的部件,才能使汽车达到所要求的性能。也可以称之为汽车操纵动力学的“反问题”,属于逆动力学研究。在此方面,尹浩[4]为推测汽车运动与转向盘转角的关系,引入神经网络的方法,通过构建转向盘转角与操纵稳定性之间关系,实现了对转向盘转角的识别。Hatwal等[5]运用最优控制方法,在给定的汽车行驶路径下,反求出转向角和制动/驱动力输入。Bernard等[6]运用逆系统法的基本方法,以转向轮角输入下线性二自由度汽车操纵动力学模型为基础,在给定汽车质心横向加速度的情况下,反求出了转向角。这些文献验证了将逆动力学运用于汽车操纵稳定性研究的可行性。
本文建立了包含非线性轮胎模型的汽车操纵动力学模型,基于逆动力学理论,构建了径向基函数神经网络,得到了前后轮胎侧偏特性组合与汽车操纵稳定性之间的映射关系。实现了根据操纵稳定性开发目标求解前后轮胎侧偏特性组合的目标。
1 用于获取神经网络模型训练数据的汽车动力学模型
1.1 整车动力学模型建立
根据研究需要将汽车车身简化为考虑转向时载荷转移的二自由度(横向平移、横摆)模型,如图1所示。进行了如下假设:忽略转向系影响,以前轮转角为输入;忽略空气动力的作用;驱动力不大,不考虑地面切向力对轮胎侧偏特性的影响;车辆坐标系采用SAE坐标系。则整车的侧向运动方程为

横摆运动方程为

为便于分析和研究,在汽车运动过程中,假设两前轮、两后轮的侧偏角相等,即
各个轮胎的垂直载荷为

式中,αi分别为各轮胎的侧偏角(i=1,2,3,4);Fyi分别为各个轮胎侧向力(i=1,2,3,4);vs为车体在大地坐标系中的纵向车速;Fz1、Fz2分别为内前轮和外前轮的垂直载荷;Fz3、Fz4分别为内后轮和外后轮的垂直载荷;m为整车质量;I为绕z轴的转动惯量;a为质心距前轴的距离;b为质心距后轴的距离;l为轴距;d为轮距;hg为车辆质心高度;δf为前轮转角;wr为横摆角速度;β为车辆质心侧偏角;ay为侧向加速度;g为重力加速度。

图1 整车动力学模型
1.2 轮胎模型
轮胎模型是整车动力学模型一个重要的组成部分。除了空气的作用力和重力外,几乎其他影响地面车辆运动的力和力矩都是由轮胎与地面接触产生的。因此,整车模型中对轮胎模型的选用将直接影响模型的精确程度。本文选用Gim非线性轮胎理论模型,此模型以Bergman的交互作用的弹簧概念为基础,充气轮胎被认为是由一系列三维变形微元组成。这些微元可以在径向、纵向和侧向传递力。每一个轮胎微元用三个弹簧微元来表示,且其对称轴相互垂直[7]。轮胎处于滚动状态时,轮胎侧向力Fy和回正力矩Mz表示为

式中,α为车轮侧偏角;u为轮胎与地面的摩擦因数;Fz为轮胎垂直载荷;k为轮胎侧偏刚度;l′为印迹长度。
1.3 模型仿真及验证
利用 MATLAB/Simulink进行动力学仿真研究,以优尼科车型为仿真对象,建立了该车的动力学模型。为了验证该模型的正确性,本文将此模型与该车型的ADAMS模型进行了对比[8],该车模型参数见表1。
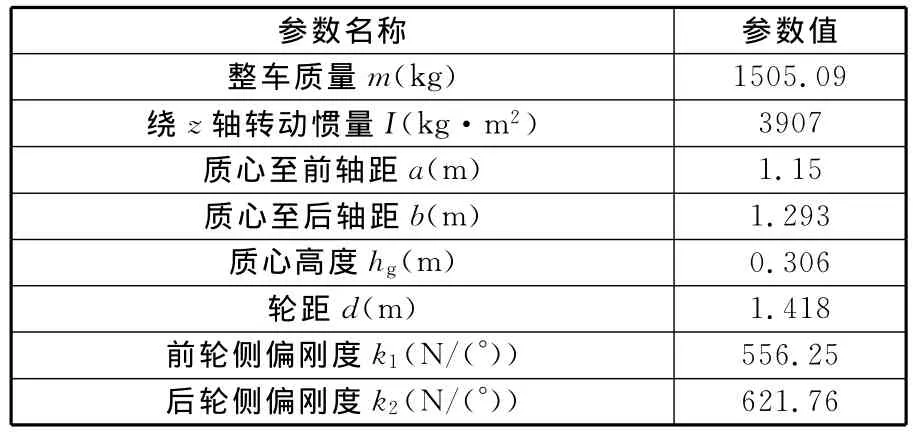
表1 符号说明和样本参数
在车速为80km/h和前轮转角为1°的工况下,分别使用Simulink模型和ADAMS模型进行前轮转角阶跃仿真分析。仿真结果如图2和图3所示。
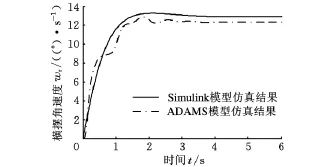
图2 横摆角速度响应曲线

图3 质心侧偏角响应曲线
由图2和图3可知,MATLAB/Simulink仿真模型具有较高的预测精确性,可以准确地实现对汽车横摆角速度、质心侧偏角等变量的模拟计算。
2 操纵稳定性评价指标的选取
对于前轮角阶跃工况下的汽车操纵稳定性评价指标,GB/T 6323.2—94中规定了横摆角速度响应时间、横摆角速度峰值响应时间、横摆角速度超调量、侧向加速度响应时间、横摆角速度总方差、侧向加速度总方差和汽车因素TB七个评价参数。郭孔辉教授提出了利用 “总方差法”来评价汽车操纵稳定性,这种评价方法可以用一个评价参数对汽车操纵性能进行评价,便于汽车之间的相互比较,同时多年实践也证明了它是一种可行的汽车操纵性能评价指标。
本文选取横摆角速度总方差Ewr与侧向加速度总方差Eay作为评价指标[9],即

式中,wrss、ayss分别为横摆角速度和侧向加速度的稳态值。
在此基础上,宗长富等[10]又提出了一个同时考虑横摆角速度总方差和侧向加速度总方差的开环综合评价指标Er:

式中,e1与e2为两个权系数,本文取e1=e2=1。
3 神经网络逆动力学模型建立
从理论上讲,只要训练样本数足够多且具有代表性,神经网络就能揭示出蕴含在其间的任意复杂规律。
径向基函数(radial basis function,RBF)神经网络是针对BP网络存在局部极小值和收敛速度慢两个固有欠缺而提出的一种改进网络。图4给出了RBF神经网络的基本结构[11],它由一个径向基神经元的隐层和一个线性神经元的输出层组成。

图4 RBF神经网络
最常用的径向基函数是高斯函数:

其中,ci为第i个节点函数的中心向量,σi表示第i个基函数围绕中心点的宽度,‖·‖是欧式范数。这样网络就实现了从输入x= {x1,x2,…,xL}到输出y= {y1,y2,…,yM}的映射。
本文选取操纵稳定性评价指标即Er为神经网络模型的输入,前后轮胎的侧偏刚度组合[k1k2]作为网络的输出。根据优尼科汽车的基本参数,定义前轮侧偏刚度的取值范围为200~700N/(°),后 轮 侧 偏 刚 度 取 值 范 围 为 220~720N/(°)。利用均匀性设计的思想,分别将这两个刚度范围分成公差为20N/(°)的25个等差数值,按照后轮侧偏刚度分别比前轮侧偏刚度大20N/(°)和40N/(°)的两种方式进行前后轮刚度组合,得到了51组前后轮胎侧偏刚度组合。将这51组前后轮胎侧偏刚度组合分别代入汽车仿真模型中进行仿真运算,得到每一个组合所对应的评价参数值Er,这样我们得到了51组Er与[k1k2]的组合。结果见表2。

表2 [k1 k2]与相对应的Er
取表中的46个组合作为网络的训练样本,剩余的5个组合作为网络的验证样本。分别将46组训练样本中的Er作为神经网络的输入,其各自相对应的[k1k2]作为输出,网络的Spread值取2,通过网络的训练得到以Er为输入,[k1k2]为输出的径向基函数神经网络模型。
将上面挑选的5组验证样本中的Er分别作为该网络模型的输入,得到相对应的5组[k1k2]。将此5组[k1k2]组合分别代入汽车仿真模型中进行仿真,得到前后轮胎按此组合取值所对应的Er值。将仿真得到的5个Er值和验证样本中的Er值作比较,结果如表3所示。由表3可知,所训练的神经网络模型具有较高的轮胎侧偏刚度组合预测能力。

表3 仿真样本对比表
4 结束语
利用径向基函数原理,通过对从汽车动力学模型仿真中得到的训练样本进行训练,可以较准确地构建前后轮胎侧偏刚度组合与操纵稳定性评价指标之间的映射关系。
逆动力学的原理方法可以应用于汽车操纵稳定性与轮胎特性关系的逆问题求解。只要有足够多的训练样本,利用人工智能的方法就可以求得轮胎特性与操纵稳定性能之间的映射关系。基于此网络,可以根据已知的操纵性能求出满足条件的前后轮胎刚度组合,运用此方法可以给轮胎供应商的匹配工作提供一定的理论参考。
[1]曹宇.轮胎操纵稳定性客观评价体系的初步研究[D].长春:吉林大学,2008.
[2]岳喜磊,王红岩,贺小军.轮胎侧偏特性对汽车前轮角阶跃输入瞬态响应影响的研究[J].装甲兵工程学院学报,2006,20(4):40-44.Yue Xilei,Wang Hongyan,He Xiaojun.Study on the Effect of Tire Cornering Characteristics to the Transient Response of Vehicle’s Front Wheel Step Steer Input[J].Journal of Academy of Armored Force Engineering,2006,20(4):40-44.
[3]陆子玉.四轮转向汽车操纵性和稳定性的联合优化及仿真研究[D].南京:南京航空航天大学,2007.
[4]尹浩.汽车操纵逆动力学的建模与仿真[D].南京:南京航空航天大学,2007.
[5]Hatwal H,Mikulcik E C.Some Inverse Solutions to Automobile Path-tracking Problem with Input Control of Steering and Brakes[J].Vehicle System Dynamics,1986,15(2):61-71.
[6]Bernard J,Pickelmann M.An Inverse Linear Model of a Vehicle[J].Vehicle System Dynamics,1986,15(4):179-186.
[7]庄继德.现代汽车轮胎技术[M].北京:北京理工大学出版社,2001.
[8]蒋国平.基于优尼科的汽车操纵稳定性研究[R].镇江:江苏大学,2003.
[9]GB_T_6323.2-94.汽车操纵稳定性试验方法[S].北京:国家发展和改革委员会,1994.
[10]宗长富,郭孔辉.汽车操纵稳定性的研究与评价[J].汽车技术,2000(6):6-11.Zong Changfu,Guo Konghui.Research and Evaluation of Automotive Controllability and Stability[J].Automobile Technology,2000(6):6-11.
[11]韩力群.人工神经网络理论、设计及应用[M].2版.北京:化学工业出版社,2007.
